大型遥控铲运机在田兴铁矿应用前景展望
2015-04-15秦四龙刘天林鲁爱辉马亚雄
秦四龙,刘天林,鲁爱辉,马亚雄
(河北钢铁集团矿业有限公司田兴铁矿,河北唐山063000)
大型遥控铲运机在田兴铁矿应用前景展望
秦四龙,刘天林,鲁爱辉,马亚雄
(河北钢铁集团矿业有限公司田兴铁矿,河北唐山063000)
为了满足田兴铁矿阶段空场嗣后充填采矿法出矿工艺需要,采用遥控铲运机进入大空区出矿,有效地解决了工作人员的人身安全问题,提高了矿山的采矿效率,降低了矿山生产运营成本。国外先进矿山已经成功实现了井下无轨设备自动化,无人采矿、自动化矿山设备在国内矿山的应用是发展趋势,同时也是势在必行的。
遥控;铲运机;空场;无人采矿
井下无轨设备以其独特的优势已经广泛应用于全世界的地下硬岩矿山。由于采矿条件越来越苛刻,地热、地压等问题使得采矿人员的工作条件越来越差,各个国家对矿山安全高度重视,为了追求提高开采效率和降低开采成本,越来越多的矿山将遥控铲运机、自动化铲运机应用于井下矿山的铲装运输[1]。铲运机是国外20世纪60年代发展起来的地下无轨装载设备,至今已有40多年的历史。随着地下无轨自行设备的发展,铲运机也得到了日趋广泛的应用,西方工业发达国家85%以上的矿山都采用无轨设备[2]。我国地下采矿设备,尤其是大型采矿钻孔设备和铲运设备,基本处于研究阶段,大型遥控设备、自动化无轨设备等均依赖进口技术和设备[3]。目前在自动化采矿方面,遥控铲运机技术、自动化铲运机技术和卡车技术已经很成熟,例如山特维克公司生产的LH621、LH514、LH514E等铲运机已在世界先进矿山成功投入运行。
1 试验矿山的基本情况
田兴铁矿采矿工程位于河北省滦县响嘡镇境内,采用充填采矿法开采。国内矿山空场嗣后充填采矿法一般采用有底部结构出矿来保证铲运机出矿安全[4],无底部结构的空场嗣后充填采矿法在国内少有应用。采用主、副竖井辅助斜坡道开拓,阶段空场嗣后充填法开采。地下采场采出的矿石经井下破碎后由3条主井提升至箕斗仓,然后用胶带运送到选厂。矿井在具备充填条件后用尾砂充填采空区。
采矿试验在-450中段进行,矿体属极厚矿体,设计分盘区开采,盘区间柱宽15 m。由于规格为4.7 m×4.7 m的主要出矿巷道布置在盘区间柱中,两侧采场回采后,出矿巷道与采空区之间实体矿柱厚度仅为5.15 m,受巷道施工质量、采场深孔爆破影响。为充分试验阶段空场嗣后充填法在矿山的实用性,增设了平底结构试验采场a×b×h=50 m× 20 m×50 m。盘区内矿块宽度为20 m,长度50~100 m,暴露面积达1 000~2 000 m2(空区体积5~10万m3)。采矿方法示意图如图1、2所示。
设计在采场底部采用21 t级遥控铲运机(配置9m3铲斗)出矿,如图3所示,铲运机为平底结构,该底部结构不留设底柱,采准工艺简单,矿石回采率高。由于是平底结构,如果人员在铲运机上操作设备在空场里出矿,人员安全难以保证,所以采场均需采用大型遥控铲运机出矿。国内已有一些矿山采用遥控铲运机出矿,但仅限于中小型遥控铲运机,如白山金矿、凡口铅锌矿等。在国内尚无大型遥控铲运机的应用先例。遥控铲运机对操作人员技术水平要求较高。

图1 阶段空场嗣后充填采矿方法示意图(正视图)Fig.1 Bench open stoping and subsequent filling method(front view)
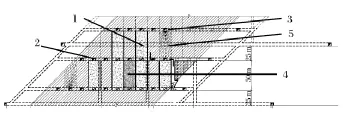
图2 阶段空场嗣后充填采矿方法示意图(侧视图)Fig.2 Bench open stoping and subsequent filling method(side view)

图3 山特维克21t柴油铲运机LH621Fig.3 Sandvik 21tdiesel LHD LH621
2 遥控铲运机在田兴铁矿的应用前景
田兴铁矿采矿工程作为目前规模最大的在建地下矿山,建设理念是数字矿山、绿色矿山、安全矿山。随着电子技术和计算机技术迅速发展,推动了工业设备向自动化方向发展,为解决安全、快速出矿问题,高智能化的铲运机在地下矿山的应用势在必行,铲运机的操作分为人工操作、视距无线电遥控(可配视频辅助)、单台铲运机自动化和全局铲运机自动化。铲运机可搭载导航系统、摄像视频辅助系统、门禁控制的机载系统、无线通讯系统。通过CANBUS总线控制,车辆管理系统(VCM)控制模块实时监测铲运机运行状况、铲运机出矿吨数、铲运机工作时间、生产监控等信息,并可以生成各种报告,实时传输到地面控制室,供管理人员优化生产。从而实现井下铲运机的视频遥控和远程自动化控制,在中央控制室一个操作员可以同时操作多台铲运机,提高了铲运机出勤率和完好率,减少了设备数量,并且还能大大减轻劳动强度,降低生产成本。使采矿工作办公室化,让操作工人从本质上远离了潜在的井下风险,最大限度地提高了安全性。
1)无线视距遥控铲运机:标准铲运机上选配遥控组件(RRC HBC CAN),RRC救援组件(无线讯号释放刹车,包括钩子),遥控器。工作人员可不进入空区,可通过操作手柄在70~100m范围内操作铲运机。针对田兴铁矿采矿试验采场设计,铲运机需要进入空场,在某些区域,操作者无法看到铲运机工作,故需要在铲运机上配备视频系统。遥控器上配备显示器,以便在操作者无法观察到铲运机工作状况时操作铲运机完成出矿任务,如图4所示。如果铲运机在采场内出现故障,操作者可以遥控释放铲运机的刹车及转向,将铲运机拖至安全区域进行检查维修,保证人员的安全。
2)单台铲运机自动化:山特维克用AutoMine-Lite系统补充了矿山自动化解决方案的领域,即可靠的、先进的单台铲运机自动化系统。AutoMine-Lite是一种先进的远程无线遥控系统,如图5所示。AutoMine-Lite系统包括一个符合人体工程学设计的操作台、针对铲运机的整合的自动化程序、专用的安全系统和可靠的通讯系统。这套系统的核心技术在于可靠的导航系统,这套导航系统在生产环境下运行时间超过180 000h。其设计用于快速安装和启动,实现在一个生产区域向另一个生产区域的快速移动。同时,通过在转载和卸载点间一次操作运行,在后续运行中,铲运机可以实现自动化行走。铲运机循环是半自动化,重复的行走和卸矿工作实现全自动化,而铲斗装矿是遥控操作。生产区域和依据安全标准设计的专用安全系统隔离。一旦任何人试图进入隔离区域,AutoMine-Lite系统会立即自动停止铲运机运行。和人工操作铲运机对比,Sandvik AutoMine-Lite效率提高超过50%。
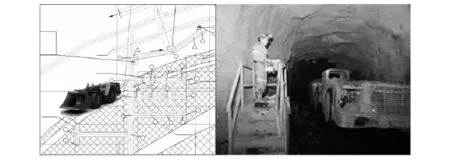
图4 山特维克LH621视频辅助视距遥控铲运机Fig.4 Sandvik LH621video-assisted remote-controlled LHD
为了保证AutoMine-Lite系统的可靠运行,山特维克研发了基于WLAN的网络系统来满足井下自动化系统无线通信需求。通讯系统可以实现在铲运机和操作台间实时图像、声频和数据传输。铲运机上整合的自动化系统包括导航系统、通讯移动终端盒视频音频系统。强大的和精确的导航系统使得铲运机在恶劣条件下高速自动化行驶。通过自动化运行的铲运机,系统操作者减少了暴露在生产区域的危险,比如冒顶、尘土、噪音、振动和有毒气体。操作者在舒适的、符合人体工程学的操作环境中,通过监控系统接收来自铲运机的综合信息。
3)全局铲运机自动化:山特维克AutoMine自动化铲装运输系统是全球第一个投入商业运行的全车队自动化解决方案,旨在提高地下采矿作业的安全性、生产效率和生产盈利性,如图6所示。安全性建立在生产区隔离以及在控制室中进行控制的基础上。一个操作人员能管理多台自动化运行设备的作业。生产装载循环是半自动化的。导航系统控制行车和卸载过程中的设备,而铲斗装载通过远程遥控进行。设备装有机载视频系统、无线通讯用的移动终端和导航系统。
AutoMine系统还包括实时生产和车队状况的状态监控和交通管理,允许几台自动化设备在同一生产区域作业。
AutoMine系统可以与矿山自有的矿山规划系统以及监控系统和数据获取(SCADA)系统对接。
因田兴铁矿采矿工程正处于采矿试验阶段,地下采场及巷道中的工业环网、通信系统尚未建设,所以单台铲运机自动化和全局铲运机自动化暂不具备现场使用条件,因此选用无线视频遥控即可解决空区出矿的问题。铲运机操作者通过无线视频遥控器操作铲运机装矿卸矿,人员无需进入空区,极大地保证了井下出矿作业的安全,提高了矿石的回收率。无底部结构的空场嗣后充填采矿方法已经在国外广泛应用,田兴铁矿应用此采矿方法尚属国内首例,应用此种采矿方法,视频遥控铲运机可以保证人员安全,对于此种采矿方法和视频遥控铲运机在国内的推广和应用具有指导意义。

图5 山特维克单台铲运机自动化(AutoMine-Lite)Fig.5 Sandvik LHD automation(AutoMine-Lite)

图6 澳大利亚北帕克斯矿全局铲运机自动化Fig.6 Sandvik automine loading system in Northparks Mine in Australia
4 结论
1)随着采矿作业条件越来越苛刻,矿山为追求高效、安全的机械化采矿工艺,越来越多的矿山将遥控铲运机、自动化铲运机成功应用于井下矿山的铲装运输,并取得了良好的效果。
2)视距遥控铲运机可实现井下采空区的安全出矿,操作者可通过视频监控系统和无线遥控装置操纵铲运机在大空场内完成高效安全出矿工作。
3)结合田兴铁矿的生产工艺,选用无线视频遥控铲运机可有效地解决采空区的出矿问题,极大地保证了井下出矿作业的安全,提高了矿石的回收率,对于视频遥控铲运机在国内类似矿山的推广应用具有指导意义。
[1]刘 荣,李事捷,卢才武.我国金属矿山采矿技术进展及趋势综述[J].金属矿山2007(10):14-17.
[2]黄琼,徐华建.地下矿用铲运机[J].矿业工程,2003(1):47-50.
[3]战 凯,顾洪枢,周俊武,等.地下遥控铲运机遥控技术和精确定位技术研究[J].有色金属,2009,61(1):107-112.
[4]郭金峰.分段空场嗣后充填采矿方法的试验研究[J].江西有色金属,2009,14(3):8-10.
Prospect forecast of large remote-controlled LHD application in Tianxing Iron Mine
QIN Silong,LIU Tianlin,LU Aihui,MA Yaxiong
(Tianxing Iron Mine,Hebei Iron &Steel Group Mining Co.,Ltd.,Tangshan Hebei 063000,China)
For the purpose of solving ore removing problem in open stope in Tianxing Iron Mine,large remotecontrolled LHD application is the priority in order to keep the loader operator safe,improve the efficiency of mining and decrease the operating cost.In some foreign advanced mines,auto-mining has been already widely and successfully utilized.Unmanned,automated trackless equipment application is the development tendency of mines in China.
remote-control;LHD;open stope;unmanned mining
TD422.4
Α
1671-4172(2015)06-0062-03
秦四龙(1984-),男,工程师,机械设计制造及自动化专业,研究方向为矿山机械。
10.3969/j.issn.1671-4172.2015.06.013
