汽车磁流变半主动座椅悬架动态特性的试验研究*
2015-04-12寇发荣
寇发荣
(西安科技大学车辆工程系,西安 710054)
2015227
汽车磁流变半主动座椅悬架动态特性的试验研究*
寇发荣
(西安科技大学车辆工程系,西安 710054)
为进一步提高汽车的乘坐舒适性,研发了一种汽车座椅半主动悬架用磁流变减振器,并对其进行阻尼特性试验,通过分析其受力情况,建立了汽车半主动座椅悬架动力学模型,设计了用于座椅磁流变半主动悬架的天棚控制策略,并在随机和正弦激励输入下进行了座椅天棚控制仿真计算,试制了磁流变半主动座椅物理样机及试验台架系统,开展了磁流变半主动座椅悬架的台架试验研究。结果表明,理论仿真和试验结果基本吻合,磁流变减振器阻尼可控性好;相对于被动座椅悬架,采用磁流变半主动座椅悬架后,座椅动态性能改善了30% 左右,磁流变半主动座椅悬架减振效果显著。
磁流变减振器;半主动控制;座椅悬架;天棚控制;动力学特性;台架试验
前言
汽车驾驶员长时间暴露于一定强度的振动中,会增加他们的疲劳感,从而降低驾驶员的操作准确性和工作效率,严重的还将影响到驾驶员的呼吸、视觉灵敏度、语言理解力和心脏功能,从而影响汽车驾驶的安全性。
通过被动式座椅的改进,来提高乘坐舒适性方面的研究主要体现在:对座椅结构的优化和软垫的改进[1-3]。但这些都未能很好地解决座椅受到低频率、大幅值的振动时隔振效果较差的问题。采用可控的座椅悬架进行减振控制是解决这一问题的有效方法[4-6]。
可控座椅悬架根据是否提供动力源和调节对象的不同,又可分为主动座椅悬架和半主动座椅悬架。半主动座椅悬架介于主动座椅悬架和被动座椅悬架之间,悬架参数可在一定范围内进行实时调节,从而获得最佳的座椅悬架综合性能。目前,磁流变减振器是一种性能较好的半主动控制装置,其能量消耗小、结构简单、响应快、动态范围大、可靠性好、适应性强[7-9],特别适合在座椅中使用。
本文中设计制作了一种座椅用单出杆式磁流变减振器,进而开发了基于磁流变减振器的汽车座椅悬架系统,并开展了座椅台架试验研究。
1 磁流变减振器的力学模型
本研究采用简化的Bouc-Wen微分模型[10-11]。该模型具有涉及参数少、数学表达式简单、参数识别容易的优点。图1为该磁流变减振器的Bouc-Wen微分模型示意图,其中滞回装置输出力F由3部分组成,分别由系统滞回系数、刚度系数和黏性系数产生。
假设滞回系统为一阻尼器装置,那么由该装置所产生的简化阻尼力可表示为
(1)
(2)

在Bouc-Wen微分模型中,黏性系数c、 刚度系数k是描述磁流变阻尼器力学性能最主要的参数,滞回环形状控制系数A主要控制滞回环的形状。系数c一般与速度有关,其值取决于阻尼力-速度曲线的平均斜率。
2 座椅用磁流变减振器的力学特性试验
2.1 磁流变减振器的研制
磁流变减振器工作模式采用流动模式和剪切模式共同作用的混合模式,如图2所示。选用MRF-132-DG 型磁流变液,磁芯采用DT4C型电磁纯铁,活塞杆材料为20号碳素钢。
该磁流变减振器的主要结构参数:最大工作行程为30mm,工作缸外径为45mm,内径为39mm,活塞直径为36mm,活塞杆直径为13mm,活塞有效长度为134mm,最大压力为5MPa,功率为4W,最大电流为2A。线圈的引线经活塞杆上的内孔引出,减振器的外观如图3所示。
2.2 磁流变减振器试验
为了研究所研制的磁流变减振器的示功特性和速度特性,依据我国汽车行业标准QC/T545—1999《汽车筒式减振器台架试验方法》,对该磁流变减振器进行台架测试,如图4所示。试验中设定激振液压缸运动的目标位移幅值分别为5,10和15mm,频率分别为1,2,3和4Hz的正弦信号。由磁流变阻尼器对输入电流的要求确定实验的控制电流分别为0,0.5,1,1.5,1.9和2.0A 6种情况。
本试验利用MTS结构拉压力性能测试系统,进行了磁流变减振器的阻尼特性试验[12]。测试系统由磁流变减振器、电液伺服激振器、力传感器、位移传感器和夹具等组成。测试中磁流变减振器沿铅垂方向安装;初始位置大致在阻尼器行程的中间部位。
2.3 试验结果与分析
通过改变振动台的激励振幅、激励频率和磁流变减振器的控制电流,可组成多组减振器拉伸/压缩试验,并基于多通道数据采集系统记录阻尼力和减振器位移数据,利用MATLAB软件进行了数据处理,结果如图5所示。
由图5可见:该磁流变减振器的阻尼力-活塞位移曲线比较饱满,磁流变阻尼器衰减振动与耗能效果良好;在一定的激振振幅和激振频率的正弦输入下,阻尼力随着控制电流的增大而增大。
不同激励频率和控制电流下的阻尼力-速度曲线如图6所示。
由图6可见:阻尼力随着减振器速度的增加而增加,在速度正负区分别呈分段线性分布,随速度变化而变化的部分即为黏滞阻尼力,而在某一工况下保持不变的部分为可控阻尼力,且控制电流越大,对应的阻尼力也越大;磁流变阻尼器的阻尼力-速度曲线具有明显的滞回特性;其阻尼力随控制电流的增加而增大,但是当电流高于1.5A以后, 阻尼力的增加幅度减小,磁流变液已渐趋饱和。
3 汽车座椅悬架动力学仿真分析
3.1 汽车座椅悬架动力学模型
忽略汽车底盘悬架等的影响,建立了“人-椅”2自由度座椅悬架动力学模型,如图7所示。
根据图7模型,利用牛顿运动定律,得到:
(3)
取状态向量和输出向量分别为
(4)
(5)
由此,可得到悬架的状态方程如下:
(6)
式中:A,B,C和D分别表示状态矩阵、输入矩阵、输出矩阵和传递矩阵。
3.2 天棚控制策略
天棚(sky-hook)控制方法由于其控制算法简单,所需测试仪器少,因而在主动、半主动悬架控制中被广泛应用[13-15]。理想天棚控制不可能在实际车辆控制中实现。通常,可以采用等效的方法利用悬架中的执行器来实现,如图8(b)所示。
理想的天棚阻尼力为
(7)
3.3 天棚控制仿真分析
针对不同行驶工况,对天棚控制下的半主动座椅悬架系统进行了仿真分析,并与被动座椅悬架进行比较。图9给出了当汽车以40和60km/h行驶在C级路面上的座椅加速度响应特性曲线。
图10给出了当汽车在振幅为0.005m、频率为2Hz的正弦模拟路面上座椅加速度响应特性曲线。
4 磁流变座椅悬架的台架试验
通过前期在MTS试验机上获得的有关磁流变减振器样机的示功特性、速度特性,验证了该磁流变减振器的可控性和有效性。将该磁流变减振器安装于座椅悬架中,在一定模拟振动激励输入下,测试座椅悬架的响应,验证在一定的控制策略作用下,磁流变减振器的减振效果。
4.1 座椅悬架样机与试验装置
4.1.1 座椅悬架样机
本试验中所使用的座椅是在原有汽车驾驶员座椅基础上,经过改进设计的磁流变悬架式座椅样机,如图11所示。其主要技术参数为:外形尺寸(长×宽×高)550mm×500mm×967mm,坐垫高245mm,坐垫宽480mm,靠背高530mm,靠背宽470mm。
4.1.2 控制系统设计
控制器通过加速度传感器采集座椅垂向加速度信号,根据一定的控制策略,给出控制量,并通过电流驱动器来控制磁流变减振器所需的阻尼力,从而减小不平顺路面经车体传递给人体的振动,提高乘座的舒适性,其控制系统组成框图如图12所示。
座椅控制系统以STM32F103VCT6增强型单片机为核心,由加速度传感器、A/D转换器、D/A转换器、控制器和电流驱动器等组成。为增强程序的可读性和可移植性,采用C语言进行程序编写。该控制系统软件部分主要由主函数和主循环组成,如图13所示。
4.1.3 座椅试验系统
本试验是在汽车悬架座椅振动试验台上进行,如图14所示。
试验选用PA-LAMI-005型单轴低噪声加速度传感器和DEWE3010-REC-SPEC型16通道数据采集处理系统进行数据采集。
4.2 座椅试验及结果分析
将带有磁流变减振器的座椅安装在振动台上,装上加速度传感器,并将一定质量沙袋置于座椅上,如图15所示。振动激励采用正弦输入,在未加控制的情况下,进行相应的试验,并采集加速度信号;在施加控制的情况下,进行相应实验,采集加速度信号;比较未加控制和施加控制的加速度响应效果。
图16、图17分别为在不同振幅、不同激励频率下磁流变座椅悬架的天棚控制试验结果。
表1和表2分别为振幅为0.005m和0.01m的正弦模拟路面输入下天棚控制响应结果。
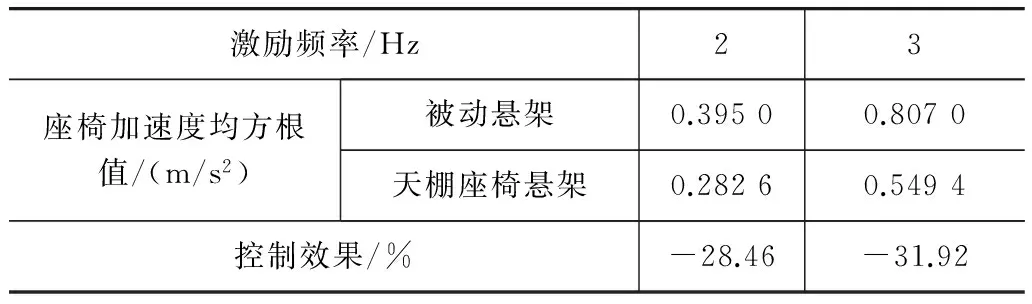
表1 振幅0.005m正弦激励下天棚控制响应
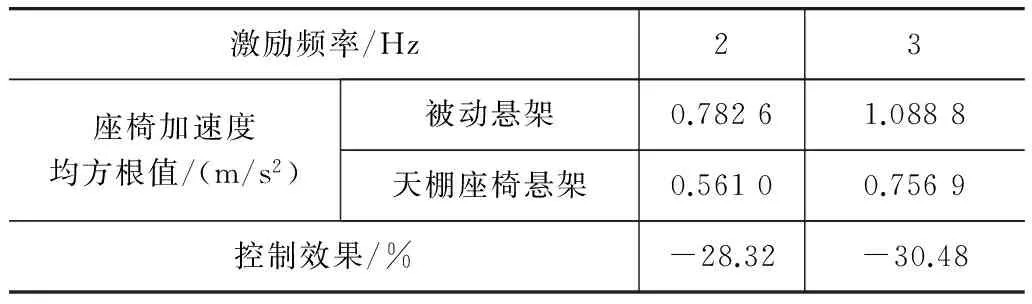
表2 振幅0.01m正弦激励下天棚控制响应
5 结论
将磁流变减振器应用于车辆座椅悬架控制中,建立了汽车半主动座椅悬架的动力学模型,并进行了相应的仿真分析,研发了汽车磁流变半主动座椅悬架物理样机和试验台架系统,深入开展了基于磁流变减振器的汽车半主动座椅悬架试验研究。
从磁流变减振器的示功特性和速度特性曲线看出,该磁流变减振器性能可控性好,能最大限度地发挥其衰减振动功能。经仿真得出的天棚控制方法对座椅悬架系统的振动控制具有较好的效果。以正弦信号作为振源, 进行了半主动座椅悬架样机的试验验证,试验结果与仿真结果基本吻合,进一步证明该算法和所建样机的有效性。
[1] Mike Kolich.A Conceptual Framework Proposed to Formalize the Scientific Investigation of Automobile Seat Comfort[J].Applied Ergonomics,2008,39 (1): 15-27.
[2] 国云鹏,宋桂秋.基于高速铁路随机振动环境对人体腰椎影响的人机工程座椅设计[J].中国机械工程,2015,26(3):289-393.
[3] 张志飞,袁琼,徐中明,等.基于体压分布的汽车座椅舒适性研究[J].汽车工程,2014,36(11):1399-1404.
[4] Maciejewski I, Glowinski S, Krzyzynski T. Active Control of a Seat Suspension with the System Adaptation to Varying Load Mass [J].Mechatronics, 2014, 24(8): 1242-1253.
[5] 朱思洪,朱星星,马然,等. 驾驶员座椅半主动空气悬架系统振动特性实验研究[J].振动与冲击,2013, 32(15):168-172.
[6] 张志勇,刘鑫,黄彩霞,等. 具有参数不确定性的车辆座椅悬架H∞输出反馈半主动控制[J].振动与冲击,2013,32(14):93-97.
[7] Dutta Saikat, Chakraborty G. Performance Analysis of Nonlinear Vibration Isolator with Magneto-rheological Damper [J].Journal of Sound and Vibration, 2014, 333( 20):5097-5114.
[8] 马然,朱思洪,梁林,等.磁流变减振器建模与试验[J].机械工程学报,2014,50(4):135-140.
[9] 贾永枢,周孔亢,徐兴.基于流动模式的汽车双筒式磁流变减振器设计与试验研究[J].机械工程学报,2012, 48(10):103-108.
[10] 薛晓敏,孙清,伍晓红,等.磁流变阻尼器滞回模型参数的敏感性分析及其简化模型[J].西安交通大学学报,2013,47(7):102-107.
[11] 张香成,徐赵东,王绍安,等. 磁流变阻尼器的米氏模型及试验验证[J].工程力学,2013,30(3):251-255.
[12] 冯占宗,陈思忠,梁义. 磁流变半主动悬架动力学特性的试验研究[J]. 汽车工程,2013,35(1):72-77.
[13] 申永军,田佳雨,赵永香,等. 含时滞半主动天棚悬架系统的解析研究[J]. 振动、测试与诊断,2014,34(6):1110-1114.
[14] 宫岛,周劲松,孙文静,等.高速列车弹性车体垂向振动控制[J].机械工程学报,2011,47(20):159-164.
[15] Van Casteren Dave, Gysen Bart, Kessels John, et al. Non-linear Full-car Modeling and Sky-hook Control for a Direct-drive Active Suspension System[J].SAE International Journal of Passenger Cars-Mechanical Systems, 2013, 6(1):252-268.
An Experimental Study on the Dynamic Characteristics of Vehicle Semi-active Seat Suspension with Magneto-rheological Damper
Kou Farong
DepartmentofVehicleEngineering,Xi’anUniversityofScienceandTechnology,Xi’an710054
For further improving vehicle ride comfort,a magneto-rheological damper for vehicle semi-active seat suspension is developed with its damping characteristic test conducted. After analyzing its force bearing condition, a dynamics model for vehicle semi-active seat suspension is built, a corresponding skyhook control strategy is devised, and a simulation is performed on the skyhook control of seat under both random and sinusoidal excitation inputs. Meanwhile a physical prototype of semi-active seat suspension with magneto-rheological damper and its test bench system are developed with corresponding bench test carried out. The results indicate that the results of simulation basically well agree with test data and the magneto-rheological damper developed has a good damping controllability. Compared to original passive seat suspension, the dynamic performances of vehicle semi-active seat with magneto-rheological damper are improved by some 30% with a significant effect of vibration attenuation.
magneto-rheological damper;semi-active control;seat suspension; skyhook control;dynamics characteristics;bench test
*国家自然科学基金(51275403)、高等学校博士学科点专项科研基金(20126121120003)、 中国博士后科学基金(2014M552553XB)和陕西省自然科学基础研究计划项目(2014JM7271)资助。
原稿收到日期为2015年3月5日,修改稿收到日期为2015年6月9日。