基于多体动力学的4WID-4WIS电动车运动学建模与逆运动学仿真*
2015-04-12董铸荣任少云李占玉胡松华
董铸荣,任少云,贺 萍,李占玉,胡松华
(1.北京交通大学机电控制工程学院,北京 100044; 2.深圳职业技术学院汽车与交通学院,深圳 518055)
2015045
基于多体动力学的4WID-4WIS电动车运动学建模与逆运动学仿真*
董铸荣1,2,任少云2,贺 萍2,李占玉2,胡松华2
(1.北京交通大学机电控制工程学院,北京 100044; 2.深圳职业技术学院汽车与交通学院,深圳 518055)
基于多体动力学理论和集成建模方法,建立了14自由度的四轮驱动、四轮转向电动车运动学模型。基于所建模型,进行典型工况的运动学仿真和车辆运动的参数化分析,仿真结果可以建立所设计制造的电动车各个车轮协调的基准数据库。
电动汽车;四轮驱动;四轮转向;逆运动学;多体动力学
前言
在四轮独立驱动四轮独立转向(4WID-4WIS)电动车辆发展过程中,相似车型和先期类型车辆得到了研究和发展,例如具有两个独立轮毂电机车轮的前驱或后驱车辆(2WD)和4个独立轮毂电机的四驱车辆(4WD)。
文献[1]中对具有保留传统转向系统的独立轮毂电机驱动车轮的车辆提出了一种控制策略和算法,该算法得到了实车测试验证,所建立的控制算法能改进车辆的驾驶性能;文献[2]中对4WD车辆提出了3个层次的控制策略,建立了针对驾驶灵活性、侧向稳定性和防侧滚的车辆驱动控制算法;文献[3]中对轮毂电机车轮失效的冗余控制算法进行了分析;文献[4]中分析和建立了针对4WIS车辆转向模型,并对转向的协调与控制算法进行研究;文献[5]中运用矢量场方位理论分析了具有四轮驱动四轮转向的农用车辆的协同控制;文献[6]中针对前轴驱动的机器人的运动轨迹跟踪和定点目标跟踪分析得到了一种统一控制算法;文献[7]中基于系统识别理论针对两轮摩托车运动轨迹跟踪开展了研究;文献[8]中针对理论驱动轮毂电动汽车不同电机控制算法的优缺点,提出了一种多模式电机控制算法;文献[9]中针对有人驾驶AWID-AWIS车辆中的整车动力学控制问题,对不同驾驶意图下的车辆运动进行控制仿真;文献[10]中提出了一种针对自适应巡航控制的遗传算法。
本文中通过对4WID-4WIS车辆结构的描述和拓扑构型的研究,建立了基于多体动力学理论和集成建模方法的整车正逆运动学模型。在模型基础上,对典型运动工况进行了仿真分析,进一步完成模型车辆参数化运动分析。仿真结果可以建立所设计制造的电动车各个车轮和车身之间完成准确协调控制的基准数据。
1 4WID-4WIS电动车运动学建模
在多体系统理论中,针对4WID-4WIS电动车可以定义从轮毂电机车轮运动引起到车身运动为正运动学研究,反之为逆运动学研究[11]。多体运动学建模可以提供统一的正逆运动学分析。仿真结果对于车轮协同控制、整车运动轨迹跟踪和定点运动跟踪控制等都是必要的研究内容。
1.1 4WID-4WIS电动车多体运动学分析
图1所示为研究的4WID-4WIS电动车。用OXYZ表示大地惯性坐标,O0X0Y0Z0表示固结在整车质心位置的车身坐标,OiXiYiZi(i=1,2,…,22)表示固结在各运动零部件质心位置的本体坐标。在模型中各类运动铰的存在决定了整车模型运动特性。表1为运动学整车模型中各零部件定义。

表1 模型中各零部件定义
4WID-4WIS电动车拓扑结构如图2所示,模型中包括了转铰、球铰和一般铰3类运动铰约束(H1,H2,…,H28)。4WID-4WIS电动车运动模型自由度(DOF)为
δ=6×n-5×nj1-3×nj2-0×nj3=14
式中:n为整车模型零部件数;nj1为整车模型转铰数;nj2为整车模型转球数;nj3为整车模型一般铰数。
1.2 1/4整车建模
所研究的4WID-4WIS电动车底盘结构左右对称,前后悬架采用相同结构,可以取整车1/4部分进行建模,首先选取左前轮部分1/4整车建模。
在多体理论中,两零部件Bα和Bβ之间转铰Hj可以表达为
(1)
(2)

(3)
选取左前轮1/4整车模型坐标阵为
约束坐标阵为
(4)

1.3 整车运动学模型集成

组集的整车主约束阵用带下标K字母表示为
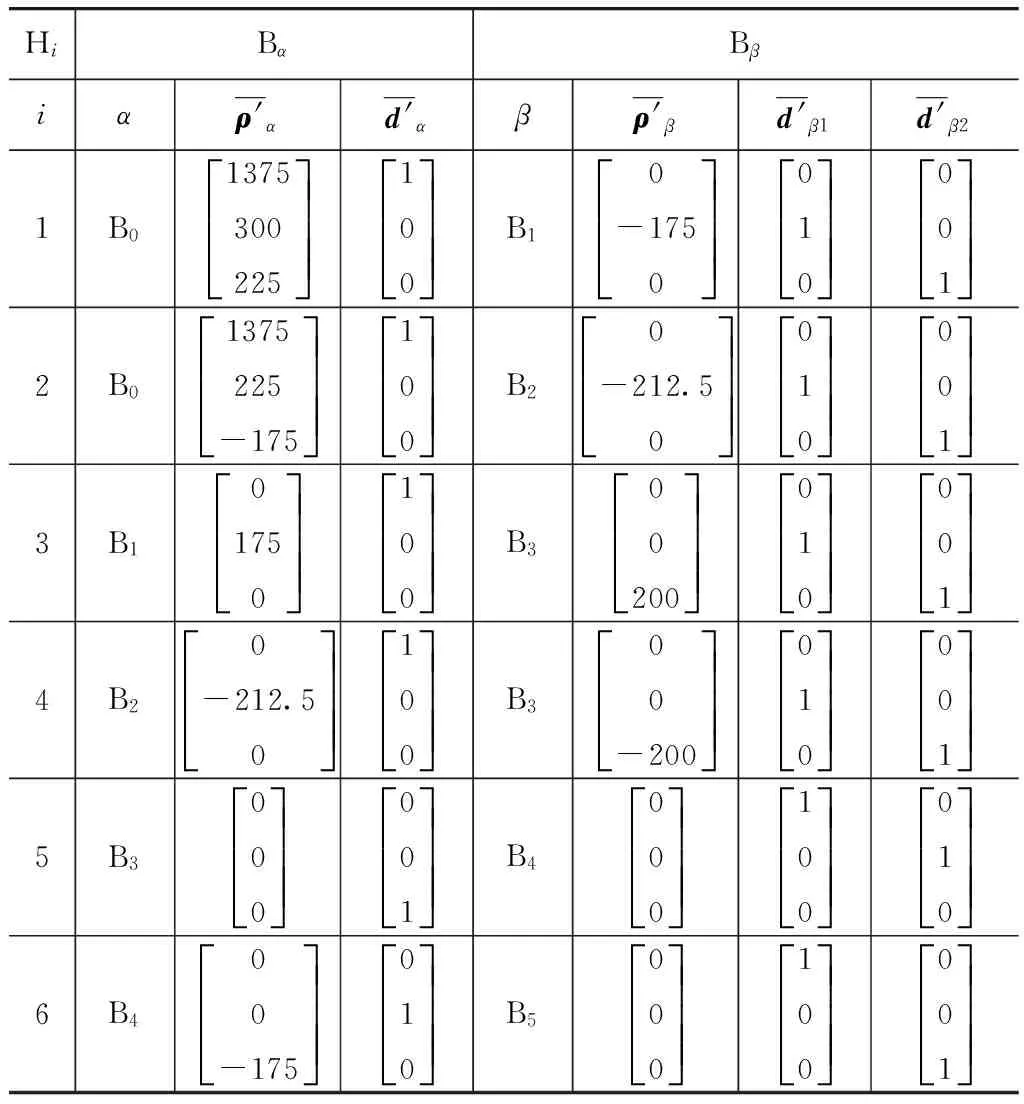
表2 1/4整车模型参数值
(5)
1.4 整车运动学模型求解
在整车逆运动学分析中,通过给定车轮滑转率,得到反映轮毂驱动电机转角的车轮转角变量θi(i=5,10,15,20)矩阵为
(6)
反映转向电机转铰变化的各转向节转角应无几何干涉,无干涉约束阵为
(7)
假定整车运动轨迹,即整车运动轨迹坐标阵为
(8)
式(6)~式(8)给出了驱动约束子阵,共包含14个解析方程,驱动约束用带下标D字母表示,集成为
(9)
式(5)和式(9)组集可以得到整车约束阵为
(10)
(11)
(12)
4WID-4WIS电动车逆运动学数值迭代流程图如图3所示,计算流程如下。
步骤4:通过设定运算时间T和迭代步长Δt,t1=t0+Δt,t2=t1+Δt,…,ti=T,通过上述步骤的循环迭代计算,可以完成4WID-4WIS电动车逆运动学数值迭代计算。
2 4WID-4WIS电动车逆运动学仿真分析
利用Adams及其solver完成轨迹跟踪的4WID-4WIS电动车仿真,仿真结果能为整车子控制系统研究提供基础数据。过曲线和直线行驶是车辆行驶的常用典型工况,理想的车轮纯滚动驱动行驶要求车身与驱动和转向电机之间精确协调。在不同车速和转弯半径下,只有车轮运动协调的准确仿真计算才能为满足整车各子系统控制算法要求提供可能。
2.1 典型工况仿真分析
选取4WID-4WIS电动车匀速6km/h通过半径为5m的曲线行驶工况,仿真运动轨迹如图4所示。在过曲线行驶末端,左前驱动轮偏离质心轨迹最大值为139.58mm。在进入曲线行驶初期,左后驱动轮偏离质心轨迹最大值为146.06mm,而右后驱动轮偏离质心轨迹值为113.26mm。在车辆行驶通过半圆曲线15.96°~63.88°之间即在1 413.84~4 717.92mm整体坐标X方向上,整车状态变量变化缓慢,表明各车轮滑转率是很小的常值,整车行驶处于稳定状态。
图5为整车质心和各车轮运动速度。在过曲线行驶始端,各车轮运动速度相对整车质心速度变化剧烈,在某些极端工况下,此时可能引起车轮滑转显著。在过曲线行驶过程中,各车轮需要的平均车速不同。右后驱动轮在1 666.67~1 831.96mm/s间变化,左后驱动轮在1 666.67~1 588.69mm/s间变化。图6为各车轮运动速度相对整车质心速度变化量。
通过给定各车轮滑移率值和滚动半径值,可计算在该典型过曲线工况下驱动轮毂电机转角和角速度时间历程,如图7所示。由图可见:在4个驱动车轮中,右后驱动轮平均驱动角速度变化最大,从4.76到5.23再回到4.76rad/s,左后驱动轮平均驱动角速度变化最小,从4.76到4.53再回到4.76rad/s。
所建仿真模型同样可以计算出转向电机控制的车轮转角的变化历程,如图8所示。由图可见:在过曲线行驶始端,各车轮转角变化剧烈,左后轮从0变化到-0.479 8rad或27.49°,右后轮从0变化到-0.338 8rad或19.41°,左前轮从0变化到0.450 7rad或25.82°,右后轮从0变化到0.317 4rad或18.19°;相对车身的转角变化分别为从0变化到-0.316 6,-0.244 3,0.295 1和0.233 3rad。在行驶过程中前后左侧车轮转角值都大于对应右侧车轮转角值,在仿真行驶时间t=5.32s时,相对转角变化值为0,车辆完成了过曲线行驶工况。图7和图8的逆运动学模型仿真结果可以提供完成该过曲线行驶工况下电机的追踪控制目标值。
2.2 4WID-4WIS电动车运动参数化分析
通过对4WID-4WIS电动车匀速6km/h通过半径为5m的曲线行驶工况的仿真,得到图5~图8结果。该仿真结果可以提供完成该过曲线行驶工况下电机的追踪控制目标值。通过参数化选取不同车速,通过模型同样仿真出上述状态变量变化历程。通过运动参数化仿真分析可以得出以下结论。
(1) 无论如何改变行驶车速,为了能完成规定的5m半径过曲线运动,各车轮都必须保持各自转角和相对转角为常值,如图9所示。
(2) 当选取车速等幅值数增加时,如取6、10、14、18、22和26km/h,可得到各车轮相对整车质心速度也按各自的等幅值数增加,右后轮幅值绝对值最大,所以在某种极端转弯工况下,4WID-4WIS电动车外侧后轮最容易出现显著滑转现象。
(3) 随着车速等幅值数增加时,完成过曲线行驶工况时间也相应减少。通过计算过曲线工况所需时间的加速递减趋势,可得出极限点在0.85s,此时车速为47.3km/h。如果车速超出47.3km/h,车辆不能完成5m半径匀速过曲线行驶工况,这种现象说明车辆动能过大,须制动才能降低整车动能,保证完成期望的匀速过曲线行驶工况,如图10所示。本模型的仿真为冗余整车能量的回收提供了一种控制可能策略。
当4WID-4WIS电动车制造完成,在非载荷情况下整车质心位置不变。由于乘客和货物的负荷不同,整车质心位置会有所变化。通过4WID-4WIS电动车质心位置参数化仿真计算,得到各车轮相对整车质心的相对速度和相对转角时间历程,在此不再累牍。
3 结论
通过运用多体理论和集成建模方法,建立了4WID-4WIS电动车运动学模型。通过仿真计算得到很多明确结论。
给定车轮滑转率,在典型过曲线和直线行驶工况下,所建模型可以仿真计算轨迹跟踪4WID-4WIS电动车轨迹跟踪的动态特性。
运用模型参数化分析方法,通过对在典型过曲线不同车速参数化分析,仿真计算结果能为实现车轮驱动、车轮转向和整车运动之间精确协同控制提供跟踪目标。模型也可以预测过曲线最大稳定车速,为冗余能量回收提供一种控制策略。
本文是有关4WID-4WIS电动车运动轨迹跟踪、定点运动等整车控制的前期研究。选取不同曲线半径和不同行驶车速,模型仿真计算结果可以生成4WID-4WIS电动车驱动数据库即驱动MAPS图,通过数据拟合和查表方式,可为车辆运动精确协同控制提供跟踪目标。
[1] Kim J, Park C. Control Algorithm for Independent Motor-Drive Vehicle[J]. IEEE Transactions on Vehicular Technology,2010,59(7):3213-3221.
[2] Kang J, Yoo J. Driving Control Algorithm for Maneuverability, Lateral Stability and Rollover Prevention of 4WD Electric Vehicles With Independently Driven Front and Rear Wheels[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2987-3001.
[3] Wang R, Wang J. Fault-Tolerant Control with Active Fault Diagnosis for Four-Wheel Independently Driven Electric Ground Vehicles[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2987-3001.
[4] Lam T L, Qian H. Omnidirectional Steering Interface and Control for a Four-Wheel Independent Steering Vehicle[J]. IEEE/ASME Transactions on Mechatronics,2010,15(3):329-338.
[5] Liu C, Wang M. Coordinating Control for an Agricultural Vehicle with Individual Wheel Speeds and Steering Angles[J]. IEEE Control System Magazine,2008,57(5):21-25.
[6] Dao T, Chen C K. A Unified Approach to Inverse and Direct Kinematics for Four Kinds of Wheeled Mobile Robots and Its Applications[J]. In Proceedings of the 1996 IEEE International Conference on Robotics and Automation Minneapolis,1996,45(3):3458-3465.
[7] Dao T K, Chen C K. Path Tracking Control a Motorcycle Based on System Identification[J]. IEEE Transactions on Vehicular Technology,2011,60(7):2927-2935.
[8] 卢东斌,李建秋,等.四轮轮毂电机驱动电动汽车无刷电机控制算法的研究[J].汽车工程,2012,34(10):871-893.
[9] 阮久宏,李贻斌,等.有人驾驶AWID-AWIS车辆动力学控制研究[J].山东大学学报(工学版),2010,40(1):10-14.
[10] 裴晓飞,刘昭度,等.一种汽车巡航控制的分层控制算法[J].北京理工大学学报,2012,32(5):479-483.
[11] 洪嘉振.计算多体系统动力学[M].北京:高等教育出版社,2009.
Kinematics Modeling and Inverse Kinematics Simulation ofa 4WID/4WIS Electric Vehicle Based on Multi-body Dynamics
Dong Zhurong1,2, Ren Shaoyun2, He Ping2, Li Zhanyu2& Hu Songhua2
1.SchoolofMechanical,ElectronicandControlEngineering,BeijingJiaotongUniversity,Beijing100044;2.SchoolofAutomotiveandTransportationEngineering,ShenzhenPolytechnic,Shenzhen518055
Based on the theory of multi-body dynamics and integrated modeling method, a 14 DOF kinematics model for a four-wheel drive/four-wheel steering electric vehicle is built. On the basis of the model built, a kinematics simulation and a parametric analysis on vehicle movement in typical conditions are conducted. With the results of simulation, a baseline database can be established for the coordination between wheels of electric vehicle designed and produced.
electric vehicle; four wheel drive; four wheel steering; inverse kinematics; multi-body dynamics
*广东省自然科学基金(S2013010013931)和深圳市基础研究项目(JCYJ20120617135920233)资助。
原稿收到日期为2014年3月4日,修改稿收到日期为2014年5月23日。
