汽车磁流变减振器半主动空气悬架仿真研究*
2015-04-12叶光湖吴光强
叶光湖,吴光强,2
(1.同济大学汽车学院,上海 201804; 2.东京大学生产技术研究所,东京 153-8505)
2015100
汽车磁流变减振器半主动空气悬架仿真研究*
叶光湖1,吴光强1,2
(1.同济大学汽车学院,上海 201804; 2.东京大学生产技术研究所,东京 153-8505)
根据空气弹簧刚度试验,建立了1/2汽车垂向振动模型。进而,依据天棚控制和地棚控制特点,设计了汽车磁流变减振器半主动空气悬架综合控制策略。在Matlab/Simulink环境下对带有不同控制策略的悬架系统进行性能仿真。对比时、频域仿真结果表明:采用综合控制策略不仅能提高汽车平顺性,且能保证汽车的操纵稳定性,使车辆综合性能得到改善。
空气悬架;磁流变减振器;天棚控制;综合控制
前言
车用空气悬架质量轻、固有频率低,因此能减小整车的振动噪声,降低车轮的动载荷,提高乘坐舒适性,并保护路面。空气弹簧有效刚度在很大程度上依赖于位移的变化,且受材料、充气压力和工作过程中的几何和接触非线性等因素的影响。因此,对带有空气弹簧的汽车进行动力学研究时,应充分考虑其非线性特性。国内外学者通过理论计算[1]、有限元仿真[2]和试验拟合[3]等方法对空气弹簧刚度特性展开研究,均取得一定成果,但很少考虑簧载质量变化对空气弹簧刚度特性的影响。本文中对某SUV汽车空气弹簧进行刚度试验,拟合得到不同气压下空气弹簧力-位移特性。进而,建立1/2汽车力学与数学模型并与被动悬架对比,经试验验证模型准确,且能反映负载变化后空气弹簧实际工作特性,具有较好的适应性,能较准确地描述系统的运动状态。
随着汽车技术的发展,传统被动悬架已难以满足人们更高的舒适性和操控性的要求,主动悬架是未来发展的必然方向,其控制策略多种多样,常用的控制方法包括天棚控制[4]、模糊控制[5]和最优控制[6]等。磁流变减振器响应速度快,噪声小,且能实现阻尼连续可调。使用磁流变减振器能保证汽车在复杂多变的路面上的平顺性和操纵稳定性,具有广泛的应用前景和潜在市场。本文中基于建立的1/2汽车垂向振动模型,结合磁流变减振器悬架的特点[7],针对采用主动悬架有时会加剧车轮振动的问题,设计了一种磁流变减振器半主动空气悬架综合控制策略,并进行时、频域仿真结果的对比。
1 1/2汽车垂向振动模型的建立
1/2汽车垂向振动模型如图1所示。参数的符号中,前面部分系统下标带‘f’;后面部分系统下标带‘r’。m1f、m1r为非簧载质量;m2f、m2r为簧载质量;mk为关联质量;m3为乘员和行李的集中质量;l为汽车轴距;a、b分别为空载时质心到前、后轴的水平距离;c为m3到质心水平距离;ktf、ktr为轮胎垂向刚度系数;z2f、z2r为簧载质量位移;z1f、z1r为非簧载质量位移;qf、qr为路面位移输入;Fsf、Fsr为空气悬架作用力;fMRf、fMRr为磁流变减振器作用力;u为车速。
根据牛顿第二定理,可得系统运动微分方程为
(1)
路面不平度的时域建模是进行道路汽车平顺性分析的基础。如果没有实际测量的时域信号,也可通过路面功率谱密度构造一段路面,常用方法有线性滤波法和谐波叠加法。本文中采用线性滤波法生成路面激励。当汽车以恒定的速度u行驶时,路面激励可由滤波白噪声描述:
(2)
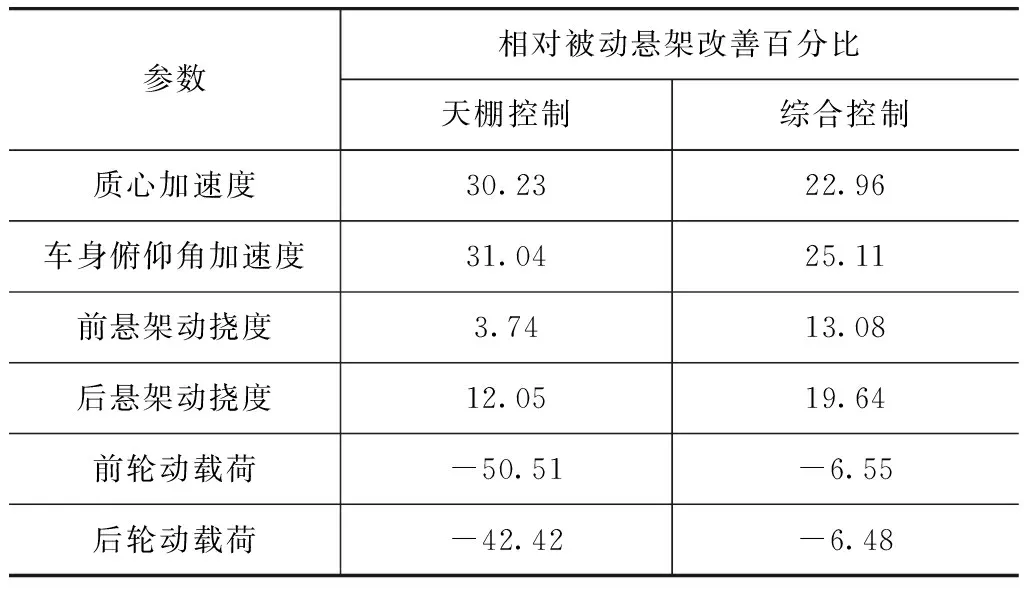
式中:G0为路面不平度系数,由路面等级确定;w为均值为0、强度为1的高斯白噪声;f0为时间下截止频率,由于时间频率f=un,n为路面统计分析的空间频率,且0.011m-1 1.1 车辆空气悬架非线性建模 空气悬架有很强的非线性,并受诸多不确定因素的影响。本文根据试验数据拟合得到空气弹簧力-位移特性曲线,完成空气弹簧非线性建模。试验方法如下:将空气弹簧调至标准高度,以从0.8到0.4MPa,间隔为0.1MPa的不同压力充入压缩空气,在每种气压下,断开气源,以±80mm的振幅、0.4Hz的频率进行垂向振动10个循环,连续记录最后一个循环的力-位移特性曲线。本试验为近似的绝热过程,该力-位移曲线的斜率为刚度值。试验所获得的迟滞回线,可以取加、卸载的均值作为无迟滞的力-位移特性曲线。根据上述方法测得某空气弹簧在不同充气压力下的弹簧刚度特性,采用最小二乘法拟合得到曲线多项式数学表达式,经过多次拟合结果对比,最后采用三次多项式:Fsf(r)=a0+a1x+a2x2+a3x3,图2示出二次插值得到的不同气压下空气弹簧力-位移特性曲面。 本文中前后悬架作用力可由空气弹簧力-位移特性曲线转化得到。实际汽车悬架中,弹簧力和悬架作用力不相等。考虑本文中研究的汽车悬架布置特点,前悬架力与弹簧力比值设定为0.8,后悬架力与弹簧力比值设定为1。 空气悬架汽车具有通过调节内部气压使车身高度保持不变的特性,当汽车的乘员和行李质量不同时,会造成内部工作压力发生变化。图1所示模型中,变量m3和c均为一定范围内的随机数,前后空气悬架可根据式(3)和式(4)中力的分配关系,得到其承受的静态载荷增加量,分别为ΔFf和ΔFr,且能反推出m3和c的数值为 m3=(ΔFf+ΔFr)/g (3) (4) 由此得到前、后悬架静态载荷为m2fg+mkb/l+ΔFf和m2rg+mka/l+ΔFr,结合图2中运动行程为0时弹簧力与气压的关系,得到空气弹簧实际气压,从而确定实际的前后悬架力-位移关系曲线。 1.2 半主动悬架控制器设计 可调减振器是半主动悬架中关键部分,本文中采用的磁流变减振器通过电流控制减振器阻尼的变化。参考文献[8],得到减振器力-速度特性曲线如图3所示。 半主动悬架的概念由文献[9]中提出,并以天棚阻尼控制理论作为半主动悬架控制策略。天棚控制策略为 (5) 式中:z2为簧载质量位移;z1为非簧载质量位移;Fd为天棚控制力;Fmax为减振器最大工作力;βd为天棚阻尼系数,根据悬架参数优化确定。 由于簧载质量加速度和轮胎变形量之间的矛盾,主动悬架在改善簧载质量振动特性的同时会在一定程度上恶化非簧载质量的振动特性[10]。因此,为抑制车轮跳动,提高汽车操纵稳定性,有必要在天棚控制基础上引入地棚控制,地棚控制策略为 (6) 式中:Fg为地棚控制力;βg为地棚阻尼系数。 综合控制集成了天棚控制和地棚控制的特点,兼顾了平顺性和操纵稳定性。综合控制力输出为 Fs=αFd+(1-α)Fg (7) 式中:Fs为减振器的输出力;α为调节因子,视汽车侧重于平顺性或是操纵稳定性而定。 本文中研究的磁流变减振器阻尼大小由电流调节,根据天棚、地棚控制设计的减振器电流控制策略为 (8) (9) 最终可得到磁流变减振器工作电流为 I=αId+(1-α)Ig (10) 由于本文中研究工况相对单一,α取为0.55。 为验证所建模型的准确性,将本文中所建立的带有空气弹簧和磁流变减振器的1/2汽车垂向振动模型与被动半车模型对比。只须将式(1)中空气悬架作用力Fsf、Fsr用kf(z2fz1f)、kr(z2rz1r)代替;磁流变减振器作用力fMRf、fMRr用代替。其中kf、kr分别为前、后悬架刚度,cf、cr分别为前、后悬架阻尼。由此,本文中1/2汽车垂向振动模型的参数如表1所示。 假设汽车以20m/s的速度在B级路面上行驶,得到磁流变减振器空气悬架与传统的被动悬架对比。取部分时域对比结果如图4所示;各指标均方根值对比见表2。 由图4和表2可见,空气悬架中各个指标与被动悬架变化趋势基本一致,均方根值结果相差也较小,说明所建立的磁流变减振器空气悬架模型准确,可用于平顺性分析。同时,空气悬架的各指标均方根值均较被动悬架小,这也证实了空气悬架汽车能改善车辆平顺性,提高操纵稳定性。 表1 1/2汽车垂向振动模型参数 表2 空气悬架与被动悬架各指标均方根值对比 2.1 时域仿真结果对比分析 为验证综合控制悬架的控制效果,利用Matlab/Simulink软件对所建立磁流变减振器半主动空气悬架1/2汽车模型进行性能仿真,并与天棚控制和被动悬架进行对比。当磁流变减振器电流恒定时,悬架可视为被动悬架。假设汽车以30m/s的速度在C级路面上行驶,时域下的仿真结果如图5所示。 由时域仿真结果可以看出:相对于被动悬架,天棚控制和综合控制均能改善整车质心加速度、车身俯仰角加速度和前后悬架动挠度。但前后轮动载荷有不同程度恶化,具体仿真对比结果见表3和表4。 表3 半车悬架系统时域仿真结果 表4 仿真结果比较 % 由表3和表4可见:综合控制虽然在改善整车质心加速度和车身俯仰角指标上控制效果略差于天棚控制,但能明显缓解施加主动控制力后产生的车轮振动加剧的现象。同时,悬架动挠度也得到进一步改善。综上分析,采用综合控制能使汽车综合性能明显提高。 2.2 频域仿真结果对比分析 图6为对时域仿真结果快速傅里叶变换处理后得到的频域内功率谱密度曲线。 分析图6(a)和图6(b)可以得出:采用天棚控制或综合控制的主动控制策略后,在1和10Hz附近的共振峰值大幅下降,此时车身振动幅度得到控制。在1Hz附近,采用天棚控制时车身振幅衰减效果优于综合控制,而在10~15Hz附近,天棚控制效果却不如综合控制。由图6(c)和图6(d)可见:采用主动控制策略后可有效降低悬架动挠度在1Hz附近的共振峰值,相比于综合控制,天棚控制在10~15Hz左右的动挠度有一个小峰值,而其它频域下两者控制效果差异不大。分析图6(e)和图6(f)可以得出:采用主动控制策略后车轮动载荷在10~15Hz左右的共振幅值大幅上升,在1Hz幅值可得到一定控制。同时,天棚控制在10~15Hz左右振动幅值明显大于综合控制。 基于时、频域仿真结果进一步分析:汽车簧载质量振动固有频率在1Hz左右,非簧载质量振动固有频率在10Hz左右,本文中所研究的1/2汽车悬架系统整车质心加速度、车身俯仰角加速度、悬架动挠度和车轮动载荷均在1和10Hz附近有振动峰值出现,侧面验证了所建立的空气悬架汽车模型合理。在1Hz左右的峰值主要由车身振动引起,10Hz左右的峰值由车轮振动引起。引入主动控制后,整车质心加速度得到控制,故上述指标在1Hz左右功率谱密度幅值均降低。由于簧载质量振动的改善会恶化非簧载质量的振动,天棚控制只关注簧载质量加速度控制,所以在1Hz左右振动幅值有大幅改善,而车轮振动明显加强,在10Hz左右车轮动载荷功率谱密度显著增大。另外,因为整车系统耦合关系,10Hz左右车轮振动的加剧也会引起整车质心加速度、车身俯仰角和悬架动挠度幅值有一定程度的增大。而综合控制正是在兼顾整车质心加速度的基础上引入对车轮振动控制,因而缓解车轮在10Hz左右振动的加剧,使汽车综合性能得到提高。 (1) 根据试验得到不同充气压力下空气弹簧位移-力特性曲线,建立1/2汽车垂向振动模型。该模型能反映负载变化后空气弹簧实际工作特性,经验证模型合理正确。 (2) 基于1/2汽车垂向振动模型,设计了半主动悬架综合控制策略,并与天棚控制悬架和被动悬架时、频域仿真结果进行对比分析。通过不同类型悬架振动特性深层分析可得:使用综合控制方法相对于被动悬架能明显改善汽车的平顺性;相对于天棚控制能改善车轮振动,使汽车操纵稳定性得到保证。 [1] Quaglia G, Scopesi M, Franco W. A Comparison Between Two Pneumatic Suspension Architectures[J]. Vehicle System Dynamics,2012,50(4):509-526. [2] 刘宏伟,庄德军,陈燕虹,等.空气弹簧非线性弹性特性有限元分析[J].农业机械学报,2004,35(5):201-204. [3] 陈燎,周孔亢,李仲兴.空气弹簧动态特性拟合及空气悬架变刚度计算分析[J].机械工程学报,2010,46(4):93-98. [4] Priyandoko G, Mailah M, Jamaluddin H. Vehicle Active Suspension System Using Skyhook Adaptive Neuro Active Force Control[J]. Mechanical Systems and Signal Processing,2009,23(3):855-868. [5] Liu Yanming, Gordaninejad Faramarz, Evrensel Cahit, et al.Experimental Study on Fuzzy Skyhook Control of a Vehicle Suspension System Using a Magneto-rheological Fluid Damper[J]. Proc. of SPIE,2004(9):338-347. [6] 盛云,吴光强.7自由度主动悬架整车模型最优控制的研究[J].汽车技术,2007(6):12-16. [7] 李锐,余淼,陈伟民,等.基于磁流变减振器的汽车悬架振动控制[J].机械工程学报,2005,41(6):128-132. [8] Uradnicek J, Musil M. Study of Adaptive Control Algorithm Using Hysteretic Magneto-rheological Damper Model in 1/4 Car Suspension[J]. Strojnicky Casopis,2008,59(4):175-187. [9] Karnopp D. Design Principles for Vibration Control Systems Using Semi-active Dampers[J]. Journal of Dynamites, Measurement and Control,1990,112(3):448-455. [10] 吴光强.汽车理论[M].北京:人民交通出版社,2007. A Study on the Simulation of Semi-active Air Suspensionwith Magneto-rheological Damper Ye Guanghu1& Wu Guangqiang1,2 1.SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804; 2.InstituteofIndustrialScience,theUniversityofTokyo,Tokyo153-8505 Based on the stiffness test of air spring, a half vehicle vertical vibration model is established. Then, according to the characteristics of skyhook control and groundhook control, a combined control strategy for semi-active air suspension with magneto-rheological (MR) damper is designed. The performances of suspension systems with different control strategies are simulated with Matlab/Simulink. The comparison on the results of simulations in both time and frequency domains show that with combined control strategy, not only the ride comfort of vehicle can be enhanced, but also the handling stability of vehicle can be ensured, leading to the improvement of overall performance of vehicle. air suspension; MR damper; skyhook control; combined control *国家自然科学基金(51105277)、上海市科学技术委员会科研项目(11DZ1120902)和国家863计划项目(2012AA111802)资助。 原稿收到日期为2013年6月13日,修改稿收到日期为2013年9月22日。
2 仿真结果分析



3 结论
