基于CC2533的ZigBee技术智能小船测深防碰撞系统的设计
2015-04-10李俊楠莫伟健万智萍
李俊楠 莫伟健 万智萍
摘 要:为减少船撞击事故的发生,提高野外水域工作的方便性,在ARM CortexTMM4开发平台的基础上,设计以无线自组通讯网作为数据传递的测深防碰撞系统。本系统是以ARM CortexTMM4芯片作为处理器,ZigBee无线通讯技术、GPS_RTK高精度定位技术和超声波测量技术作为拓展功能,最终搭建而成并实现测深、定位和防碰撞。测试结果表明,系统是拥有较强的可用性和拓展性能,有利于减少船撞击事故和方便野外水域工作。
关键词:ARM CortexTM-M4;GPS_RTK; ZigBee;超声波;拓展性
中图分类号:TP393 文献标识码:A
Abstract:In order to decrease the number of ship wreck accidents and improve the convenience in outdoor water working, based on ARM CortexTM-M4 development platform, we designed the sounding anticollision system which relies on the wireless adhoc communication network as data transmission. With the ARM CortexTM-M4 chip processor, the expansion function of ZigBee wireless communication technique, GPS_RTK highprecision location finding technique and ultrasonic measuring technique, the system was built up finally to realize the sounding, locating and anticollision. The test result indicates that this system possess stronger availability and expansion capability.
Key words:ARM CortexTM-M4;GPS_RTK;ZigBee;ultrasonic wave;scalability
1 引 言
随着社会经济的发展,人们安全意识的不断提高,无线网络技术快速地变更,ZigBee技术应用领域也变得相当的广泛,信息的传输从有线逐渐步入无线传感网络传输,趋向于信息智能化传输。结合当今社会多次出现的货船碰撞、相撞事件,而且船舶碰撞是导致海洋石油平台结构损坏的突出风险因素,为减少事故的发生,利用了目前比较先进的技术对船的各个角度进行实时的监测,降低事故的发生[1]。为保证船只的安全,防止船只在浓雾天气发生碰撞,利用超声波测量技术测量船只与障碍物的相差距离进行监测。针对船只受到了一定程度的碰撞,激发船只的报警系统,并通过ZigBee无线网络技术传输求救信号到安全中心。本设计在船只航运、航海旅行和勘探方面都具有一定的实用意义。
2 系统的总体设计
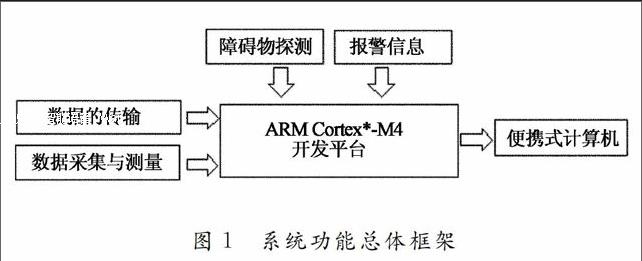
本系统主要由ARM CortexTM-M4嵌入式平台数据处理模块、ZigBee无线组网通讯模块、超声波障碍物探测防碰撞模块、GPS定位信息模块、数据采集模块和用户的便携式计算机数据接收模块组成。 系统功能的总体架构图如图1所示。
ARM CortexTM-M4嵌入式平台数据处理模块中用到功耗低、成本低和易于使用等优越性能的ARM CortexTM-M4芯片。Cortex-M4内核是在Cortex-M3内核的基础上发展起来的,其性能比提高了20%[2]。ARM CortexTM-M4加入了信号处理控制功能,在处理数据和传送数据起到不可忽视的作用,工作时, ARM CortexTM-M4主要利用它强大的数字信号控制功能、快速的数据处理功能,并对测量到的信息起到中转站的作用。
GPS定位信息模块,引入了误差低、精确率高的GPS_RTK技术,RTK( Real Time Kinematic)属于动态测量技术,是一种载波相位差分技术,关键就是参考站观测值的误差计算和流动站观测值的误差消除与定位[3]。RTK定位技术主要是通过实时处理两个测站载波相位观测量的差分方法, 即是将基准站采集的载波相位发给用户接收机, 进行求差解算坐标。
计算技术与自动化2015年3月
第34卷第1期李俊楠等:基于CC2533的ZigBee技术智能小船测深防碰撞系统的设计
ZigBee无线组网通讯模块,在数据采集与测量完成后,数据将会暂存在处理器中,我们需要把数据通过数据链路传送给地面工作人员,系统运用无线组网通讯ZigBee技术。ZigBee 技术是IEEE802.15.4基础上发展起来的,是最新的一种近距离、低复杂度、低功耗、低数据速率、低成本的双向无线通信技术[4]。ZigBee技术的无线网络传输模块主要是用来实现把智能小船探测出来的信息传送回到移动用户端,实现整个系统的实时性数据记录。整个数据传输体系结构主要由处理器模块、无线通信模块和能源模块组成,处理器模块和GPS显示模块通过串口连接起来。无线ZigBee通讯网是一种网状网,由三个部分组成:网络协调器、路由器和终端设备[5]。系统测量出来的数据是通过ZigBee无线网络传输的,在基于ZigBee2007/PRO协议栈而开发的ZStack协议栈中,当应用程序需要发送数据时,通过APS数据实体发送数据请求到APS,在每一层中加上适当的帧头,组成帧信息,然后发送出去,传送到移动用户端。考虑到无线网络传输的质量和传输数据的安全性,系统中引入了在应用层新加入了分割传输功能和在有效载荷中加入了安全key的安全性较高的基于ZigBee2007/PRO协议栈而开发的ZStack协议栈。
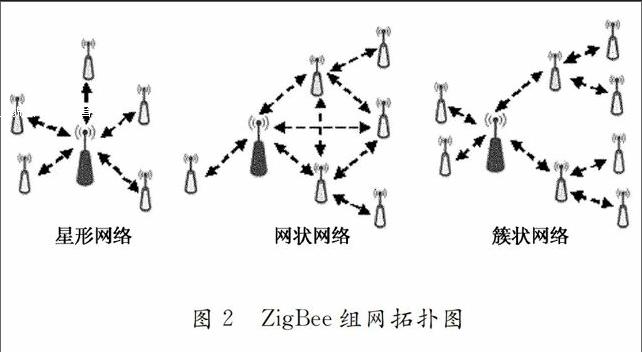
在配置网络方面,ZigBee网络拓扑结构总共有三种情况:星型网络拓扑、网状网络拓扑和簇状网络拓扑[6]。具体的ZigBee组网拓扑如图2所示。
为了降低船受到碰撞造成的损失,系统还引入了超声波障碍物探测防碰撞模块,当小船受到障碍物碰撞威胁,超声波探头把接收到的模拟信号经过A/D转换成数字信号,激响蜂鸣器,从而达到了报警的目的。
用户的便携式数据接收模块主要是考虑到在野外工作的方便,以及能够获得实时的数据,用户可以用笔记本电脑安装系统的观测软件,就可以方便地了解到小船的实时数据。
整个系统运用了模块化的形式组建而成,降低了系统平台的构建难度以及部分模块的损坏造成对整个系统损坏的威胁,而且优化了整个系统的性能,总体上达到了低成本、低功耗、低复杂度和高操作性能。
3 系统硬件设计
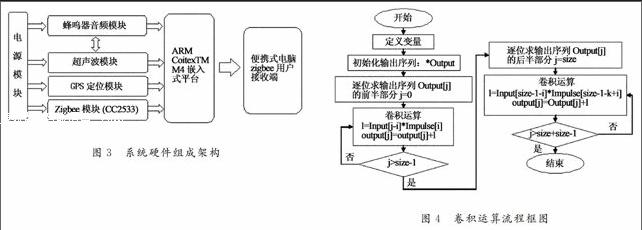
系统硬件设计部分主要包括ARM CortexTM-M4嵌入式平台、GPS定位模块、ZigBee数据传送模块、超声波模块、音频模块和电源模块6个部分。系统硬件设计部分的架构如图3所示。ARM CortexTM-M4嵌入式平台数据处理模块主要用到了ARM CortexTM-M4微控制器,以及RS232串口通讯接口。ARM CortexTM-M4扩展有单周期乘法累加 (MAC) 指令、优化的 SIMD 运算、饱和运算指令、单精度浮点单元 (FPU)和信号控制功能。平台留出其他的接口,为了方便系统扩展其他的功能。
GPS定位模块用到了拥有USB接口的GPS定位器,通过串口转USB口线把GPS定位器与ARM CortexTM-M4嵌入式平台相连,GPS定位数据通过USB接口传到处理器,经由处理器通过ZigBee发送器输送到接收端。
ZigBee数据传输模块主要是用到了由CC2533芯片作为主控芯片的ZigBee节点设备,在小船上装的节点作为发送端,经过多次的节点转发,传送到长距离的用户端的接收节点。
超声波模块主要用到了超声波收发传感器、RS232串口、MAX232核心芯片。通过利用RS232串转TTL模块把超声波收发传感器获取到的信息传送到控制器。
音频模块主要是用于碰撞部分的警报信息的发出,用到了拥有5 通道DMA、23 个 GPIO、2 个 USART、SPI、I2C 以及 4 个计时器等丰富周边组件的CC2533芯片,低功耗、8位分辨率的ADC0809芯片,高耐压、大电流、反向驱动的ULN2003驱动芯片和KH-4025,频率为50KHz,信噪比为50db的蜂鸣器,当系统遇到碰撞威胁的时候,微控制器会会向音频模块发出一个电平,激发蜂鸣器达到报警的目的。
4 系统软件设计
本系统软件设计包括3个部分,分别是数字信号控制的开发、基于ZigBee网络的数据传输阶段的开发和定位的数据处理的优化。
4.1 数字信号控制与优化
按照系统对信号控制的要求,用ARM CortexTM-M4微控制器作为数字信号控制和处理的处理芯片,数字信号控制与优化主要是通过对芯片进行扩展,并且利用比较优化的算法进行处理,通过滤波算法把信号进行进一步的滤波优化,使得信号更加地光滑、准确,从而减少测量的误差。
本系统中在数字信号处理部分运用了卷积算法对信号进行处理,让复杂的信号简单化,提高了芯片的运行速度和工作效率。
卷积运算在cortex-m4上的程序实现[7-8],程序流程框图4所示:
4.2 基于ZigBee2007/PRO协议的数据传输部分的开发
数据传输部分的开发主要是Z-Stack协议栈。目前比较规范的两种协议有“ZigBee”和“ZigBee2007/PRO”[9]。本系统主要是利用了ZigBee2007/PRO较高的安全特性, Z-Stack协议栈就是基于ZigBee2007/PRO协议进行开发的,包括协调器节点、路由器节点程序和需要执行的各种功能的程序的开发。在数据传输模块中,协调器节点主要是负责网络的构建和网络数据的中转,路由器节点负责数据的接收。
ZigBee网络协调器发送数据部分的程序流程框图和Zigbee网络路由器终端接收数据部分的程序流程框图如图5所示:
4.3 基于GPS_RTK定位技术的数据处理的优化
GPS_RTK定位技术主要包括数据的处理和数据的传输,本系统主要捉住了对这两方面的技术在原来的基础上引入了适当的优化算法,提高数据的处理效率和数据传输的准确性。GPS接收机根据载波频率分成了单频接收机和双频接收机,本系统中GPS接收机采用双频接收机,双频接收机可以同时接收L1、L2两种载波的信号,GPS的L1频率上调制有C/A码和P(Y)码,L2频率上调制有P(Y)码和L2C码[10]。对于GPS定位电离层误差是固有的,单频接收机消除不了这个误差,双频接收机可以结合L1、L2两种频率的卫星观测信息建立模型消除电离层误差,也可以升级RTK功能,使测量更加准确。
5 系统监测软件及界面的设计
系统监测软件主要由定位坐标、碰撞警告、测量环境和信息报表四个部分组成。定位坐标就是对小船目前所在位置进行定位,通过无线传送到监测软件上,从而让用户知道小船的所在位置,便于营救人员确定营救目的地。碰撞警告是当小船收到了碰撞的威胁之际,发出警告信息,并且示意出还有多长距离就会碰上障碍物,起到警告的作用。测量环境就是把小船在当时所在的地点的实际水深、小船陷水深度测量出来,并送到客户端软件。信息报表就是把所有需要测量的数据信息汇总起来,可以对以前的记录数据进行搜索。系统监测的软件界面如图7所示。
6 系统测试
系统经过搭建之后,并对系统进行一定的测试。在一个面积有50M2的湖里,用户接收端就安排在附近的一个亭子里,把ZigBee子节点设备安装在湖的四周围,并引向接收端,移动点通过RS232接口与cortex—M4连接用来发送测量的数据通过节点的转发送到用户端。
经过测试,在测试环境里面,系统的ZigBee设备能够自动搜索到其他节点,通过手动连接,并且能够获得比较准确的测量数据。
在防碰撞警报测量测试中,小船离障碍物有6M(船头离障碍物的距离)的地方为记录点A,报警周期为T=200ms,空气中传播速度V=340M/S,波特率为P=9600,在船与障碍物碰撞期间采取4个点。测量距离、实际距离与相对误差数值如表1所示。表中测量结果说明本系统的防碰撞部分的误差在3CM~25CM,误差范围大致上符合要求。
7 结 语
本系统用到了精确度较高的GPS_RTK定位技术做为小船的定位、低功耗和低复杂度的ZigBee无线通讯网络用来对测量到的数据进行传输,超声波技术用来测量距离的长度并和蜂鸣器进行结合达到报警的目的。经过测试,系统的各项功能基本得以实现,并对扩展的功能预留出扩展的接口以作为功能扩展作用,本系统可以用在户外作业,对水域的探测与安全防御有一定的帮助。
参考文献
[1] 史有刚, 埕岛油田船舶碰撞平台概率分析[J].石油矿场机械,2010,39( 8):98-100.
[2] 刘贯营,赵玉荣. Cortex-M4内核微处理器DMA方式的高速A/D采样[J].单片机与嵌入式系统应用,2012(7):71-72.
[3] 邹璇,唐卫明. 区域地基增强PPP_RTK模糊度快速固定方法研究[J].大地测量与地球动力学,2014,34(1):76-83.
[4] 肖广荣,姚家胜,刘惠.基于ZigBee技术的石油开采过程的远程监控系统[J].西安石油大学学报,2014,29(1):101-106.
[5] 苏中滨,王学进.基于ZigBee技术的奶牛定位系统组网方案研究[J].东北农业大学学报,2013,44(2):136-141.
[6] 冯扬.智能小区无线网络系统安全研究[J].电子测量技术,2014,37(2):132-136.
[7] 薄祥雷,何怡刚.基于影响因子的频域盲源分离排序算法[J].电子学报,2014,(2):360-365.
[8] 赵渊,张进.大电网可靠性评估的卷积计算模型[J]电网技术,2013.37(9):2466-2473.
[9] XU F, ZHU M. Design and Implementation of Library Monitoring System Based on ZigBee[J]. Journal of Computational Information Systems, 2013, 9(13): 5281-5289.
[10]焦海松,陈军.电磁干扰对GPS双频接收机定位精度的影响[J].测绘科学技术学报,2013,30(6):559-568.
[11]方新磊,郝伟,陈宏. 基于频域滤波的加速度信号处理[J].仪表技术与传感器,2012,(4):94-96.
[12]王翔,黄知涛,周一宇. 基于循环频域滤波及Schmidt正交对消的单通道信号分离算法[J].国防科技大学学报,2012,34(4):120-125.
[13]马秀荣,张媛. 基于功率谱形态学的LFM信号参数估计[J].系统工程与电子技术,2014,36(1):16-22.
[14]李文仲,段朝玉.ZigBee2007/PRO协议栈实验与实践[M].北京:北京航空航天大学出版社,2009:185-304.
[15]高守玮,吴灿阳. ZigBee技术实践教程:基于CC2430/31的无线传感器网络解决方案[M].北京: 北京航空航天大学出版社,2011.
