基于K-means 聚类点密度的WSNs 加权质心定位算法*
2015-03-30张乙竹周礼争
张乙竹,周礼争,唐 瑞,余 敏
(1.江西师范大学 计算机信息工程学院,江西 南昌330022;2.江西师范大学 软件学院,江西 南昌330022)
0 引 言
无线传感器网络(WSNs)[1]是由大量的传感器节点组成,通过无线通信方式形成的自组织多跳网络,广泛应用于交通、安全、军事、医疗等领域,具有很广阔的应用前景。
目前现有的定位算法根据是否需要测量节点间的距离分为基于测距(range-based)和基于非测距(range-free)两大类。基于测距技术主要有RSSI,TOA,TDOA,AOA 等。其中,RSSI 测距技术依据接收信号强度,计算出收发节点间距离,因其成本低廉、能耗低,在无线定位技术中得到广泛应用。
三边测量法是目前最容易实现的定位算法之一,它是利用三个锚节点来确定未知节点的位置,然而单次估算的坐标值无法准确反映未知节点真实位置;文献[2]中提出利用三边测量法来估计三维点云图的方法;文献[3]中提出一种聚类改进多边定位算法(MLA);文献[4]结合煤矿井下特征,提出一种自适应RSSI 三角加权质心定位算法(WCLA);文献[5]采用RSSI 进行测距并使用Zig Bee 进行定位。
由于K-means 聚类算法在处理大数据集时具有相对可伸缩和高效率特点,正好符合WSNs 环境中大量锚节点组成的数据集。据此,本文提出一种基于K-means 聚类点密度的加权质心定位算法(KCPD-WCLA),首次对各聚类中点的密度加以考虑。理论与仿真结果均表明:改进的算法操作性强,定位误差更小。
1 三边测量定位算法原理
三边测量定位法是以已知的三个锚节点为圆心,以锚节点到未知节点距离为半径做圆,得到三个圆交点,建立方程组求解出定位结果。定位原理如图1 所示。

图1 三边定位原理Fig 1 Trilateral positioning principle
解方程组(1)即得未知节点的坐标

其中

由于受环境等因素影响,通过Shadowing 经验模型[6]得到距离存在误差,从而导致未知节点估计坐标与真实值存在一定误差,记为

2 KCPD-WCLA 设计
1)n 能被3 整除
即n%3=0(%表示取模),得到n/3 个接近真实距离的估计位置。
2)n 不能被3 整除且余数为2
即n%3=2,因为与未知节点距离越近的锚节点在传播过程中受环境影响越小,得到距离值误差也越小,所以,选取未知节点得到的RSSI 值最大对应距离值,再与剩余的两个距离值进行分组求解,可在一定程度上减小误差。如剩余两个距离值有一个或两个都是最小距离值,则选取第二或第三小距离值计算,得[n/3]+1([]表示取不大于n/3的最大整数)个接近真实距离的估计位置。
3)n 不能被3 整除且余数为1
即n%3=1,选取未知节点得到的RSSI 值最大对应距离值与剩余的那个距离值进行计算。如剩余距离值是最小距离值,则选取第二、三小距离值进行计算,得[n/3]+1 个接近真实距离的估计位置。
将上述结果作为K-means 聚类样本集。KCPD-WCLA设计主要经过二个步骤,步骤1 给出了K-means 聚类[7]具体过程;KCPD-WCLA 实现由步骤2 给出。
步骤1:K-means 聚类
1)数据预处理
因为基于RSSI 测距得到距离值存在误差,导致得到的聚类样本误差累积,须进行处理;否则,会严重影响后续定位算法的执行。
首先扫描一次样本集,计算每一个样本与其它样本距离,累加求其距离和,并计算距离和均值。如果某样本与其它样本距离和大于距离和均值,则将其舍弃,重复舍弃所有不合规定样本。最后得到的新数据集就是聚类初始集合。设预处理后得到的m 个聚类样本集合为M={(xi,yi)|i=1,2,…,m}。
2)K-means 聚类算法执行步骤
a.初始化:输入初始样本集合和聚类个数k。随机选择k 个样本作为k 个簇的各自中心,记为C={(cxi,cyi)|i=1,2,…,k}。
b.分配M:计算剩下的m-k 个样本到k 个聚类中心距离dij(第i 个样本到第j 个聚类中心距离),把dij中最小的样本i 划分到聚类j。当m-k 个样本全划分到聚类,则组成k 个聚类集,记为W={wi|i=1,2,…,k}。
c.修正W:取各聚类中所有元素平均值作为新的聚类中心,重复找到所有聚类中心C'={(c'xi,c'yi) |i=1,2,…,k}。
d.判断C'是否等于C:若C'=C,则算法结束;否则,令C'=C,返回步骤b。
步骤2:KCPD-WCLA 实现
1)由步骤1 得到k 个聚类,聚类集合记为W,包括各聚类点集合及其点个数ni。
2)K-means 聚类算法具有各聚类内样本紧密度高、聚类间差异度大、得到的k 个集合包含点个数不尽相同等特点。先选择各聚类的聚类中心作为质心定位算法中多边形顶点,即把C 作为多边形顶点;当第i 个聚类wi中包含点个数ni越大,说明未知节点在wi中出现机率越大,基于此给予该聚类越大权重,则KCPD-WCLA 表达式如下

3 仿真实验与结果分析
本文采用Matlab 对提出的算法进行仿真实验,以此来验证算法的有效性。实验环境设置在200 m×200 m 的正方形区域内,未知节点布设在中心(100,100)m 处,设置参数k=5。为降低偶然性误差,在相同环境下进行50 次实验取平均值。在区域内改变布设的锚节点个数得到一系列未知节点坐标估计值,并与多边定位算法(MLA)和WCLA 进行比较。
1)算法计算复杂度分析


图2 计算次数比较Fig 2 Comparison of computation times
2)定位精度比较
随机布设500 个节点,锚节点数从50 个增到200 个,每次增加25 个。节点部署如图3 所示,其中正方形代表未知节点真实位置,菱形代表锚节点。仿真如图4、图5。

图3 WSNs 节点部署Fig 3 WSNs node deployment
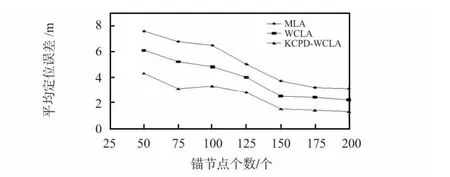
图4 平均定位误差Fig 4 Average localization error

图5 最大定位误差Fig 5 The maximum localization error
从图4、图5 可得,随着n 增加,KCPD-WCLA 平均定位误差和最大定位误差都有明显下降,平均定位误差比MLA小50.1%,比WCLA 小34.9%;最大定位误差比MLA 小46.7%,比WCLA 小27.8%,且当n=150 时,定位误差基本稳定。
4 结 论
本文在原始数据分组的基础上,采用了不重复的三个距离信息进行分组,大大降低了运算量,同时把K-means 聚类算法引入到WSNs 定位中,提出KCPD-WCLA。仿真结果表明:该算法比MLA 和WCLA 在定位精度上有明显改善,具有可操作性强,定位精度高等优势,符合WSNs 一般性应用场景,具有普遍适用性。
[1] Rabindra Bista,Yong-Ki Kim,Jae-Woo Chang.A new approach for energy-balanced data aggregation in wireless sensor networks[C]∥Ninth International Conference on Computer and Information Technology,South Korea:IEEE,2009:9-15.
[2] Hyun Chul Roh,Yungeun Choe,Jinyong Jung,et al.Position estimation of land-mark using 3D Point cloud and trilateration method[C]∥The 11th International Conference on Ubiquitous Robots and Ambient Intelligence,Kuala Lumpur,Malaysia:IEEE,2014:298-302.
[3] 孙大洋,钱志鸿,韩梦飞,等.无线传感网络中多边定位的聚类分析改进算法[J].电子学报,2014,42(8):1601-1607.
[4] 曹开来,余 敏.无线传感器网络煤矿井下RSSI 自适应定位算法[J].传感器与微系统,2014,33(6):129-132.
[5] Heinemann Anna,Gavriilidis Alexandros,Sablik Thomas,et al.RSSI-based real-time indoor positioning using Zig Bee technology for security applications[C]∥The 7th International Conference on Multimedia Communications Services and Security,Krakow,Poland:IEEE,2014:83-95.
[6] 朱明辉,张会清.基于RSSI 的室内测距模型的研究[J].传感器与微系统,2010,29(8):19-22.
[7] Reche Cristina,Viana Mar,Brines Mariola,et al.Determinants of aerosol lung-deposited surface area variation in an urban environment[J].The Science of the Total Environment,2015,517(1):38-47.
