被动传感器航迹起始算法
2015-03-30刘昌云梁志兵李志汇
于 洁,刘昌云,梁志兵,李志汇
(空军工程大学 防空反导学院,陕西 西安710051)
0 引 言
航迹起始是多目标跟踪和航迹处理的首要问题,其任务在于减少多目标跟踪固有的组合爆炸所带来的计算负担[1],并实现目标初始状态的估计。由于被动传感器系统有抗电磁干扰能力强、隐蔽性好、目标指示精度高、可昼夜警戒[2,3]等优点,对于现代战争具有重要意义,故此类系统的目标跟踪和航迹处理等问题已受到广泛关注。
被动传感器系统仅能获得目标的方位角和俯仰角而缺乏距离信息,故其仅能通过目标的角度信息解算出目标的运动特性,因此,此类系统在对多目标进行定位时会产生较多的"鬼点",导致航迹起始结果存在大量的虚假航迹,特别是在密集杂波下起始航迹更为困难。针对此类问题,许多学者作了研究。文献[4]给出了被动传感器Hough 变换形式;文献[2]将概率网格的思想引入被动传感器航迹起始,根据传感器测量精度计算每个网格出现目标的概率,最后利用序列Hough 变换检测航迹,可有效改善航迹簇拥,但虚假航迹占有率较高;文献[3]提出一种适用于被动式单传感器系统的航迹起始方法,采用改进的启发式规则对观测数据进行预处理,再用逻辑方法进一步起始航迹,具有较高的起始率,但存在航迹簇拥现象。
针对上述问题,本文提出一种被动传感器航迹起始算法。该算法首先利用多规则法进行数据预处理,消除一部分“鬼点”,然后将候选点迹模糊映射到参数空间,最后通过序列Hough 变换检测航迹。仿真实验表明:该算法适合于杂波环境下目标的航迹起始。
1 问题描述
1.1 被动传感器系统跟踪模型
图1 是二维平面内两个传感器跟踪两个目标的情形。假设传感器s(s=1,2)位置为(xs,ys),传感器s 在第k 次扫描中得到的量测可表示为{是传感器s 在第k 次扫描中得到的第m 个量测。
1.2 被动传感器量测
考虑两个被动传感器观测同一目标的情形。假设传感器只能观测目标的方位角,传感器s 的位置坐标为(xs,ys),测角误差为ws,s=1,2。目标在某一时刻的坐标为(x,y),则可得传感器s 测得的方位角为

图1 被动传感器跟踪模型Fig 1 Passive sensor tracking model

其中,w1,w2独立且
根据方位测量值可求得目标的坐标估计值[1]
1.3 数据预处理
由图1 可知,两个传感器视线交叉得到4 个目标点,但实际目标只有2 个,其余2 个是鬼点。为减少计算量,应先对测量数据进行预处理,尽可能排除鬼点。本文采用多规则法排除鬼点。
假设ri为第i 次扫描量测的位置坐标,具体规则[5]如下:
1)速度约束

2)加速度约束

3)角度约束

将传感器获得的方位量测经式(2)和式(3)处理转换为笛卡尔坐标量测,再通过上述规则来进行数据预处理,排除一部分鬼点,得到候选航迹。
2 Hough 变换
2.1 被动传感器Hough 变换形式
由于被动传感器只有角度量测,因此,需对Hough 变换作一定的修正以适合于被动传感器系统。以图1 所示的观测系统为例,假设β1和β2分别是传感器1 和传感器2 获得的同一目标的方位角观测值,可求得被动传感器Hough变换形式[4]

其中,L1,2为两个传感器之间的距离,ρcor为传感器局部坐标中Hough 变换在绝对坐标系统中的修正,且与传感器1 极坐标(r1,α1)相关

但受参数空间分割大小的影响,Hough 变换会使峰值点附近存在较多的相近峰值,更重要的是当测量误差较大时,累积峰值会更加不明显[6]。假设传感器1 和传感器2的测角误差分别为dβ1和dβ2,则根据式(7)可得

其中
2.2 模糊Hough 变换
由本文2.1 节得出,Hough 变换采用0 ~1 二值累积,存在变换误差。针对这一问题,本文将模糊集的思想引入Hough 变换参数空间累积中。
假设(ρ,θ)平面内的模糊集Ai,核元素为根据式(7)计算出的(ρi,θi),其隶属度为1。ρ,θ 方向上的最大误差范围分别为ρm和θm,Ai的论域为
其中,Δρ 和Δθ 为参数空间分割大小,kθ=2θm/Δθ+1为θ 方向上的支集个数,kρ=2ρm/Δρ+1 为ρ 方向上的支集个数。
利用高斯函数计算隶属度,即

将参数空间划分为大小为(Δρ,Δθ)的方格,利用式(14)计算与(ρi,θi)相对应的隶属度μijk,并将μijk作为累积量对参数空间进行投票。
2.3 序列Hough 变换检测航迹
本文在参数空间投票时引入了模糊集的思想,故峰值累积效果更为明显。但是由于测角精度和坐标转换产生的误差,使得最高峰值附近仍存在部分次高峰,如果采用阈值法提取峰值,会出现航迹簇拥现象。针对这一问题,本文采用序列Hough 变换。
序列Hough 变换的基本思想是:
投票结束后,峰值提取时,每次只取一个最大值,并将最大峰值所在的位置(ρt,θt) 保存起来,同时将其所对应的量测从量测集中删除。然后再用新的量测集进行模糊Hough 变换,重复此过程,直到本次最大峰值小于某一预定值时,Hough 变换结束。
3 算法步骤
航迹起始流程如图2。
1)根据1.3 节提出的多规则法,对雷达数据进行数据预处理,排除一部分的鬼点;
2)初始化变量p=1;
3)根据被动传感器的测角精度,选取量化间隔Δρ,Δθ,并建立累加矩阵B,且设置其每一个元素为0;
4)将数据预处理后的所有量测,由式(7)对每个离散化θ 计算出相应的ρ,并保存在矩阵ρ1中;
5)对ρ1中每一个元素(ρi,θi),由式(14)计算累积量μijk,根据式(15)对矩阵B 进行投票

6)从累加矩阵B 中提取最大值B(ρmax,θmax),将参数保存在航迹矩阵中,并将与B(ρmax,θmax)对应的量测从量测集中删除;如果p=1,保存Bmax=B(ρmax,θmax);
7)p=p+1,如果B(ρmax,θmax) <μBmax,转步骤(3);否则航迹起始结束。
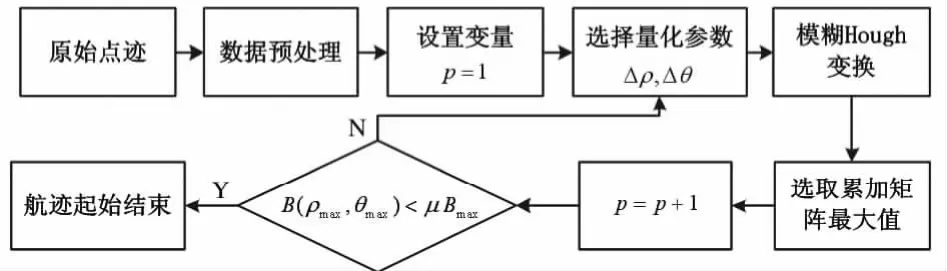
图2 航迹起始流程图Fig 2 Procedure of track initiation
4 仿真分析
4.1 仿真环境
本文仿真实验采用两被动传感器系统,观测空域为(x方向:0~10 000 m,y 方向:0~10 000 m),传感器1 和传感器2 的坐标分别为:(0,-10 000)m,(10 000,-8 000)m。两传感器的测角精度分别为0.5°和0.3°。假设4 个目标在观测空域内匀速直线运动,其机动情况见表1。
两个传感器同步工作,采样周期均为1 s。每个扫描周期的杂波个数服从泊松分布,可通过Matlab 的poissrnd 命令产生,杂波在扫描区域内均匀分布,且杂波密度λ=0.15 个/km2。

表1 目标机动情况Tab 1 Target maneuver instance
4.2 仿真结果与分析
为验证本文算法的有效性,将本文算法与标准Hough变换进行对比分析。依据文献[6,7],参数空间划分为Δρ=100 m 和Δθ=1°。由于采用高斯型隶属度函数,衰减较快,故模糊Hough 变换支集个数kθ=kρ=5,标准Hough变换检测门限设定为最大峰值的0.75 倍,序列Hough 变换检测门限选取最大峰值Bmax的0.65 倍。
图3(a)为目标真实轨迹Hough 变换累积图,图3(b)和(c)分别为杂波情况下标准Hough 变换和本文算法的累积图。将图3(b),(c)与图3(a)相比,图3(c)的峰值累积效果更为明显;从峰值大小看,图3(c)的峰值最大,分辨率较高。
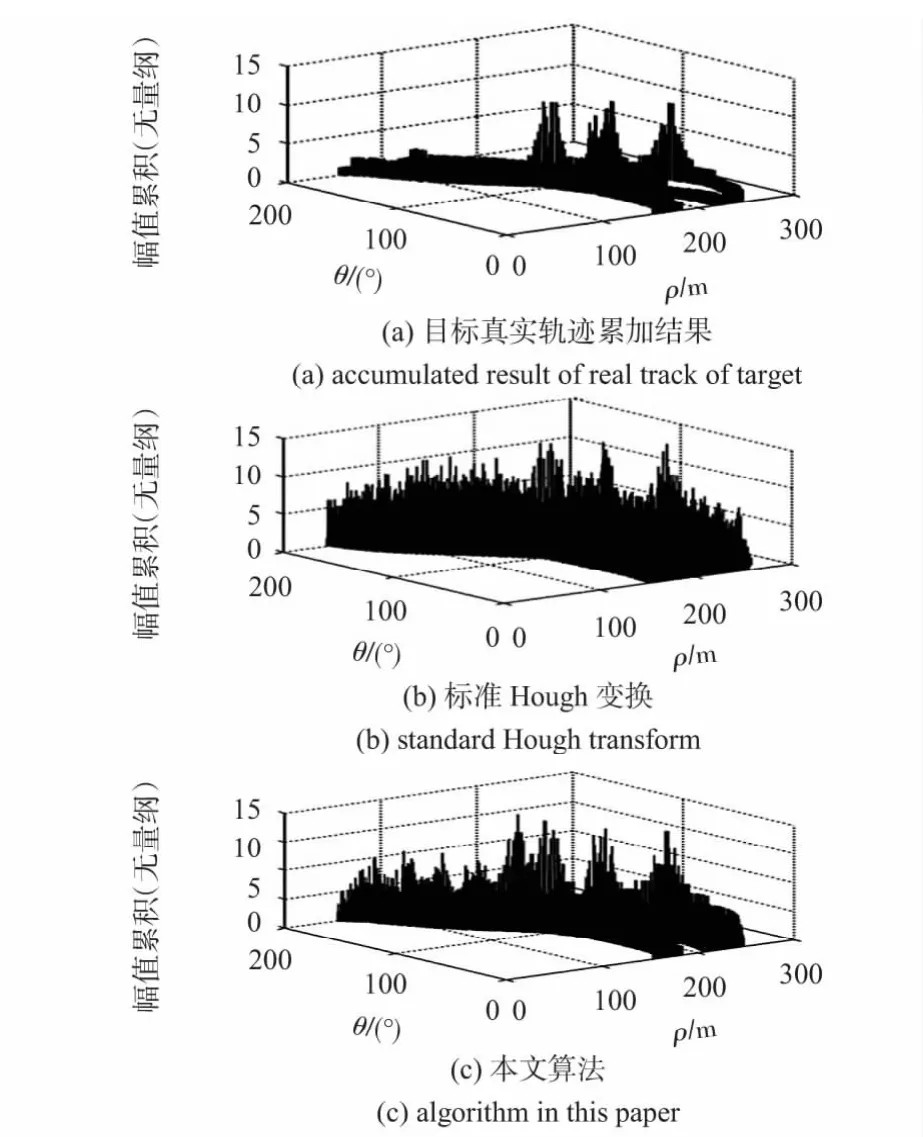
图3 参数空间累加结果Fig 3 Parameter space accumulated results
图4 分别给出了标准Hough 变换和本文算法的航迹起始结果图,图中直线为目标真实轨迹。由图4(a)可知,虽然真实航迹被成功起始,但起始结果包含较多的虚假航迹,且出现航迹簇拥现象。而从图4(b)可以得出:本文算法不仅可以准确起始目标航迹,还能有效避免航迹簇拥,并抑制虚假航迹的产生。
进行100 次蒙特—卡洛仿真,计算两种算法的航迹起始性能指标[8],结果见表2。

图4 航迹起始图Fig 4 Track initiation diagram
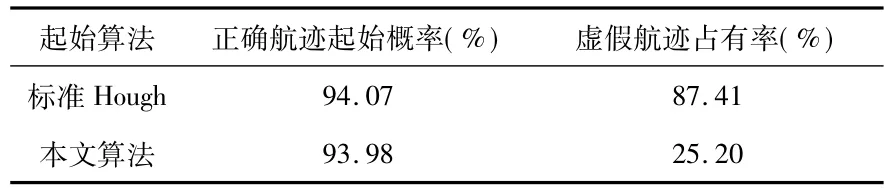
表2 两种算法起始性能比较Tab 2 Initial performance comparison of two algorithms
分析仿真结果,可得到以下结论:
1)与标准Hough 变换相比,本文算法采用了模糊映射的思想,有效抑制了变换误差的影响,使得峰值累积效果更为明显;同时采用序列Hough 变换检测航迹,有效避免了航迹簇拥现象。
2)在相同的杂波环境下,标准Hough 变换和本文算法的正确航迹起始概率均较高,且效果相近,但前者的起始结果包含大量虚假航迹,不能满足实际要求,而本文算法的虚假航迹占有率较低,效果较好。
5 结 论
针对目标数目未知和被动传感器测量精度不同情况下的航迹起始问题,本文提出一种基于多站被动传感器系统的航迹起始算法。仿真实验表明:该算法不仅能准确起始航迹,还可有效改善航迹簇拥现象,且抑制虚假航迹的产生,适合于杂波环境下目标的航迹起始。
[1] 何 友,修建娟,关 欣,等.雷达数据处理及应用[M].北京:电子工业出版社,2013.
[2] 孔云波,冯新喜,鹿传国,等.被动传感器航迹起始算法[J].光电工程,2011,38(8):60-66.
[3] 陈 辉,徐林海,李 晨,等.被动传感器系统的快速航迹起始算法[J].光电工程,2008,35(9):17-21.
[4] Alexiev K M,Bojilov L V.A Hough transform track initiation algorithm for multiple passive sensors[C]∥Proceedings of the International Conference on Multisource-Multisensor Information Fusion,Paris,France,2000:11-16.
[5] 肖 松,谭贤四,王 红,等.一种可行的临近空间高超声速目标航迹起始方法[J].空军工程大学学报:自然科学版,2013,14(1):11-15.
[6] 吴泽明,任姝婕,倪明放.基于模糊累积函数的航迹起始问题研究[J].系统工程与电子技术,2009,31(5):1213-1216.
[7] 朱红艳,韩崇昭,韩 红,等.航迹起始算法研究[J].航空学报,2004,25(3):284-288.
[8] Zhang Yanhang,Su Xiaohong,Ma Peijun.Multi-Hough transform track initiation for detecting target with constant acceleration[C]∥International Symposium on Information Science and Engineering,2008:581-584.
