基于铁基非晶薄带巨磁阻抗效应的位移传感器*
2015-03-30王红洲郑金菊郑建龙金林枫
王红洲,郑金菊,郑建龙,金林枫,赵 静
(浙江师范大学 信息电子研究所,浙江 金华321004)
0 引 言
对物体位置、位移测量的传感器有多种[1],按是否接触可分为接触式和非接触式位移传感器。传统的接触式位移传感器,如绕线式电位器位移传感器,虽然结构简单,易操作,但存在着磨损、阶梯误差的弊端[2]。非接触位移传感器有多种,如磁阻位移传感器[3],它是基于磁场变化下电阻发生变化的原理而研制。由于在同样的微弱磁场变化下,巨磁阻抗(GMI)材料具有更明显的阻抗变化,因此,本文研制了一种基于GMI 效应的位移传感器。该传感器小型化,且经济实用。
1 铁基非晶薄带的GMI 特性与后续处理
GMI 效应是指在交变电流的激励下,软磁导体的阻抗随着外界微弱磁场的变化而发生巨大改变的现象。通常用巨磁阻抗比GMI(Z)衡量材料的GMI 特性

式中 Z(Hex)为外界磁场Hex时材料的阻抗值; Z(Hmax)为外界磁场达到饱和Hmax时材料的阻抗值。
为同样磁场变化下获得更高的GMI(Z),需对铁基非晶薄带进行一定的处理。
1.1 纵向磁化
对非晶铁芯的磁化主要有两种方式,即横向磁化和纵向磁化[4]。横向磁化是指电流直接通过材料,根据通电直导线能产生磁场定律可知,材料在横向受到了磁化。纵向磁化是指电流通过绕在材料外面的线圈,通电的线圈在材料的纵向产生了磁场,因此,材料在纵向被磁化。由于铁基材料的横向渗透性相对较小[5],采取横向磁化的GMI(Z)比较小[6],故设计采取了纵向磁化的方式。
1.2 材料对GMI 的影响
从图1 可知,GMI 与所用晶带的类型相关。本文选取FeCuNbSiP,FeCoNbSiP 进行了对比实验。从图中可以看出FeCoNbSiP 能获得更高的GMI。
1.3 电流退火对GMI 的影响
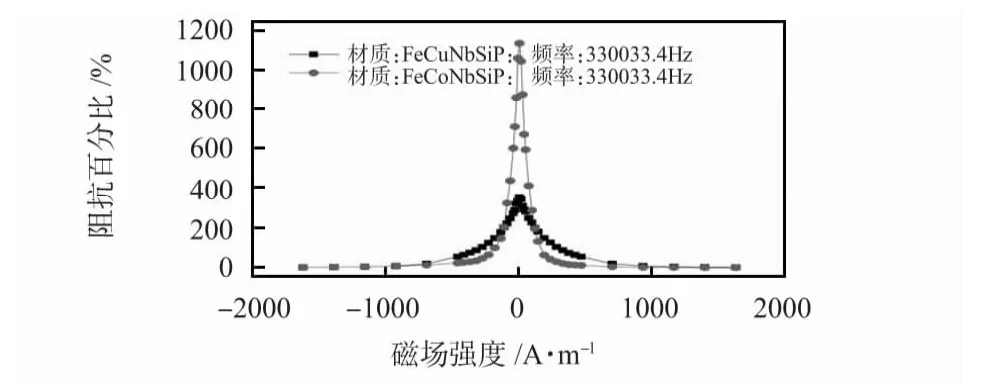
图1 不同材料的GMIFig 1 GMI of different materials
为获得更高的GMI 效应,可以对晶带进行处理。常用的处理方式有温度退火、磁场退火、电流退火。由于电流退火使用时间少,故采用了电流退火的处理方式。不同的退火方式下的GMI 如图2 所示,实验选取了0.365A 电流退火(即电流密度为31 A/mm2)下的晶带。
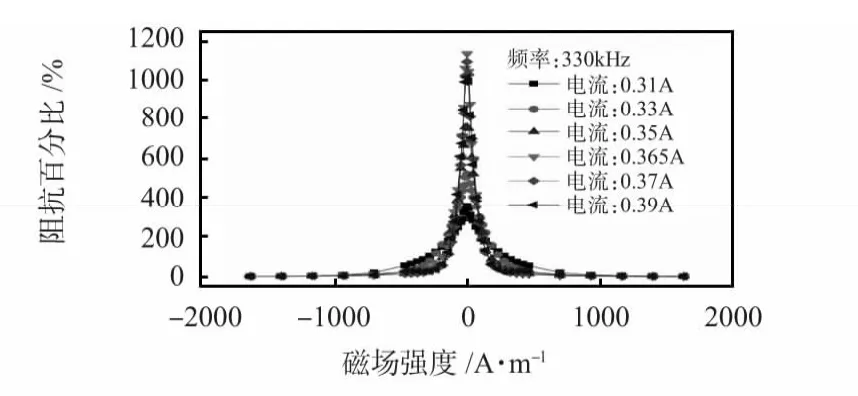
图2 不同电流退火下GMIFig 2 GMI under different current annealing
通过上述实验,最终采用了0.365A 电流退火下的Fe-CoNbSiP 晶带作为磁敏材料,并对其进行纵向磁化。
2 位移传感器电路设计与工作原理
位移传感器电路由矩形波产生电路、敏感单元和信号处理电路组成,传感器电路如图3 所示。
由于材料在330 kHz 范围内呈现最佳特性,故传感器的驱动信号需要是高频信号。设计采用了STC15F104E 集成电路产生高频矩形波信号,将上述信号作用在敏感单元,由于不同位移时的敏感单元呈现的阻抗不一样,故经敏感单元后的输出信号波形不一样;通过检波电路对其进行信号拾取,然后通过差分运放电路对前级拾取的信号进行运算,改变到适合读取的部分。

图3 传感器电路图Fig 3 Circuit diagram of sensor
2.1 矩形波产生电路
根据对非晶薄带特性可知,需要有一种交变的磁信号作用在非晶铁芯上。因高频正弦信号的产生复杂,采用脉冲信号激励磁芯可以降低传感器的损耗,提高灵敏度的特性[7],故用矩形波驱动。传统的激励磁芯的信号源大部分是通过74HC04 产生方波,后接RC 充放电改变占空比[5]或者采样分立元器件产生驱动信号[8]。由于这些信号源的频率不稳定,导致输出信号的不稳定,故提出了采用一种新颖的占空比和频率可调的矩形波产生方式,即用集成芯片STC15F104E。该芯片是由宏晶公司研制的一种基于51 单片机的微型单片机,通过编程可以实现某一占空比和频率的矩形波信号。具体电路见图3 中矩形波产生电路部分。
2.2 传感单元
传感单元是由直径0.08 mm 的漆包线绕在长度为20 mm的非晶薄带组成。薄带就是上述具有高阻抗效应的非晶材料。在测试的过程中,通过移动一外置磁铁来改变作用在传感单元上的磁场强度,由于不同磁场强度作用下传感单元对外呈现的阻抗不一样,设计电路可将这一现象通过位移和电压的关系显现出来。
2.3 信号处理电路
该部分电路包括检波电路和OPA2344 差分运放电路。
1)检波电路:检波电路采用最简洁的二极管包络检波电路,它由D1,R2,C1 构成。其中,R2=680 kΩ,C1=0.1 μF,具体电路见图3 中的检波电路部分。由于前面一级电路是高频信号,故所用的二极管应具有耐高频且导通电压低的特点,电路中采用的是肖特基二极管IN5818。
2)差分运放电路:该部分的目的是为了放大显示电压。通过电阻器R2,RV1 来确定偏置电压,从而实现对源输入信号进行运算。
3 GMI 位移传感器性能测试
实验前自制了一种位移移动装置,用该装置作为移动的平台测试了所设计的位移传感器(如图4 所示)。该精密装置由安装在滑轨上测微头和支架以及滑块、磁体组成的敏感单元构成。测试时将滑块固定,通过可旋转测微头实现精密的位移。实验的初始状态是磁体距离敏感单元50 mm。

图4 位移移动平台Fig 4 Mobile platform for displacement
为分析传感器的特性,对其进行了重复性测试和迟滞性测试。测量结果如图5 和图6 所示。图5 是重复性测试曲线,曲线a,b 都是非晶薄带从位移0 mm 到位移50 mm 时的测试电压情况,测试间隔为1 mm。从图中可以看到两组曲线基本重合,通过计算得重复性的最大偏差为0.297 3%,这说明传感器的重复性很好。图6 是迟滞性测试曲线,曲线a 是非晶薄带位移0~50 mm,间隔为1 mm 时的电压测试情况。曲线c 是非晶薄带位移50~0 mm,间隔为1 mm 时的电压测试情况。从图中可以看出基本重合:通过计算得迟滞性的最大偏差为0.652 6%,说明所设计的传感器基本无迟滞。通过对图6 中的数据分析可知,在测试的位移为18~28 mm 内传感器的灵敏度和线性度最优。通过设置磁芯的最初位置可以改变量程范围为0~10 mm。通过软件Origin 8.0 对这段数据进行拟合,得到图7 中关于原始数据和拟合曲线的图像。此时实测曲线和拟合曲线的相关度达到了99.98%,线性最大偏差为0.58%。拟合的直线方程为

式中 x 为电压,V;y 为位置,mm。

图5 重复性数据分析Fig 5 Repeatability data analysis
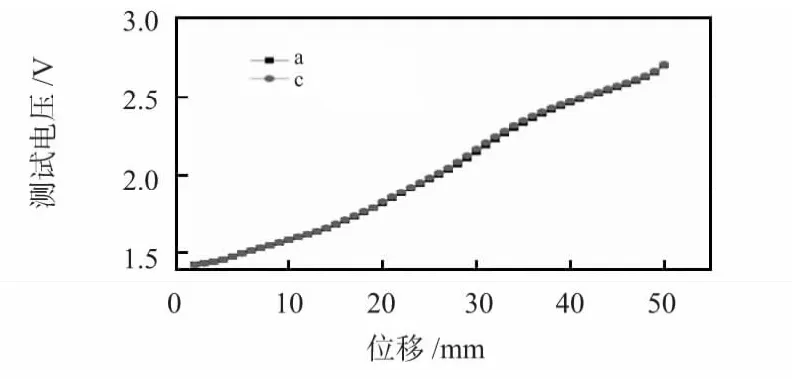
图6 迟滞性数据分析Fig 6 Hysteresis data analysis
4 结 论
本文利用Fe 基非晶薄带,设计和制作了一种新型的位移传感器。设计采用了一种新的材料作为磁芯和一种新的驱动信号产生方法,并通过后续信号处理电路实现了位置和位移的测量。实验结果表明:研制的磁敏位移传感器具有极微弱的迟滞现象、重复性好等优点。此外,电路结构简单,使用方便,成本低廉,满足了项目的要求。

图7 测试曲线与拟合曲线Fig 7 Test curve and fitting curve
[1] 昌学年,姚 毅,闫 玲.位移传感器的发展及研究[J].计量与测试技术,2009,36(9):42-44.
[2] 殷玲玲,尚群立.磁阻传感器在直线位移传感中的应用[J].传感技术学报,2006,9(4):1121-1124.
[3] 王永龙,杨 卫,石云波,等.基于磁阻传感器的弱磁信号采集系统设计[J].传感器与微系统,2008,27(1):69-71.
[4] 杨介信,杨燮龙,陈 国,等.一种新型的纵向驱动巨磁阻抗效应[J].科学通报,1998,43(10):1051-1053.
[5] 于葛亮,卜雄洙,史晓军,等.基于纵向激励的铁磁非晶带弱磁传感器研究[J].南京理工大学学报,2011,35(3):338-342.
[6] 杨晓红,郑金菊,任俊华,等.不同驱动方法下Fe 基纳米晶丝的GMI 研究[J].金华职业技术学院学报,2006,6(6):1-5.
[7] 赵 湛,鲍丙豪,徐云峰,等.钴基非晶磁芯巨磁阻抗效应电流传感器[J].仪器仪表学报,2007,28(3):483-488.
[8] 卜雄洙,赵文于,葛 亮,等.反馈式巨磁阻抗弱磁传感器的设计与实现[J].南京理工大学学报,2011,35(6):801-804.
