基于LabVIEW 的三轴微弱磁场检测系统*
2015-03-30罗志会徐校明马雪佳潘礼庆
刘 亚,罗志会,徐校明,马雪佳,潘礼庆
(三峡大学 磁电子与纳磁探测研究所,湖北 宜昌443002)
0 引 言
随着电子行业的迅猛发展,各种磁性材料和磁器件的应用越来越普遍,对微弱磁场测量精度也提出了更高的要求。当前,根据测量系统敏感元件的工作原理分类主要有磁通门传感器、磁阻传感器和电感式传感器等。磁通门传感器由一套环绕磁芯的线圈组成,高导磁铁芯在交变磁场的饱和激励下,基于磁感应强度与磁场强度的非线性关系来测量微弱磁场。磁通门传感器分辨率最高可达10-11T,但缺点是体积偏大、易碎、响应速度较慢(上限响应频率约为1 kHz)[1,2]。磁阻传感器主要由铁磁材料如镍铁导磁合金制成,这种合金薄膜的电阻值随外界磁场的变化而变化,通过电桥电路将电阻变化转换为电压变化。这种传感器的迟滞误差和零点温度漂移可通过对传感器正反向交替磁化的方法加以消除。但是控制电路复杂,体积较大,应用成本高[3]。采用PNI 公司开发精密电感式传感器SEN—R65,匹配3D MagIC 专用驱动芯片,其输出的数字量可直接送入微处理器,不需要信号调理,避免了在传感器与微处理器之间构建A/D 转换接口。该传感器组件省去了信号调理,大大简化电路,具有体积小、精度高、稳定性好、价格低等特点[2]。
本文基于LabVIEW 虚拟仪器技术设计三轴微弱磁场矢量检测系统,能实时显示、存储、回放、分析磁场的大小和方向,功能易扩展,界面友好,应用前景广阔[4]。
1 系统硬件设计
在构建三轴磁传感器系统时,3D MagIC 芯片外接3 只磁传感器,通过SPI 总线接口与单片机STC12LE2052AD通信,再通过RS—232 接口与电脑通信,系统硬件结构框图如图1 所示。

图1 系统硬件结构框图Fig 1 Structure block diagram of system hardware
检测系统选取2 只SEN—R65 传感器和1 只SEN—Z 传感器(两种传感器仅器件封装不同),与阻值为100 Ω 的偏置电阻器相连,减小了各轴的传感器灵敏度和测量信号的放大电路特性不完全相同引起的测量误差。SEN—R65 传感器作为一个LR 弛豫振荡电路的电感元件,电感值与传感器轴平行方向的有效磁场呈比例。SEN—R65 传感器功耗低、尺寸小、磁场测量范围大、分辨率高和工作温度范围广,满足微弱磁场的探测要求。
3D MagIC 芯片集成了放大和A/D 转换电路,实现了微弱信号放大,再通过A/D 转换得到各轴磁场强度数字量。3D MagIC 还包含一个SPI 接口电路,可以与主微处理器进行通信,具有支持全双工操作、数据传输速率快等优点。
为减少磁场梯度的影响,3 只传感器的位置尽可能的接近。确保三者轴线相交于一点,减小轴间不正交误差影响。3 个磁轴要形成一个标准正交基,标定时存在误差,需要进行误差分析和预补偿来提升系统的测量精度[5,6]。
2 LabVIEW 软件设计
检测系统的软件采用LabVIEW 可视化界面编程。上位机实现串口设置、串口写、串口读检测、串口缓存和中断等功能,同时利用计算机强大的信号处理能力,实现磁场波形的显示、线性度分析、数据存储、波形回放、误差补偿等功能。
2.1 上位机与串口通信
由于上位机与下位机通信必须具有通信协议,RS—232串口的配置基本情况:波特率9 600 bit/s、数据位8、校验位无、停止位1,当上位机向0x01 启动发送,传感器开始测量,然后返回测量结果数据。
软件编程利用了函数库中的VISA 函数。VISA 本身不提供硬件编程能力,只有一个高层的API(应用程序接口),具有可扩展性和接口无关性。串口通信通过当串口接收到字符串的时候,使用VISA Enable Event,VISA 会产生一个事件。在while 循环中,在VISA Read 函数前面放置一个VISA Wait on Event 函数。只有当串口接收到一个字符的时候VISA Read 函数才会得到执行。直到数据到达串口的时候,调用VISA Wait on Event 函数的线程会一直被阻塞着,在程序停止前需要执行一个Disable VISA Events 函数。因此,VISA Read 函数只有在端口上有数据的时候才会被执行,子VI 如图2。

图2 串口通信子VIFig 2 Sub-VI of serial communication
2.2 信号提取、显示、保存及回放
3D MagIC 将返回每个传感器正反向测量结果,格式为24 位的二进制补码(范围:-8 388 608 ~8 388 607),通过串口传到电脑上,LabVIEW 软件识别到的是字符串,经过字符串转数值操作,把有用信号提取为数值波形实时显示[7],子VI 如图3 所示。

图3 有效信号提取子VIFig 3 Sub-VI of effective signal extraction
2.3 零点校准与误差补偿
三轴磁传感器自身存在一定的误差范围,在零磁场环境下,其读数不一定为零,从而使零点发生偏移[7]。在标定时,测量系统在零磁场环境中输出结果,通过上位机分析并编程校准,补偿零点偏移误差。三轴磁传感器最重要的性能是线性区和灵敏度。每只传感器性能的好坏,直接由线性度反映。LabVIEW 界面程序采集不同磁场下的数据量输出,然后进行线性拟合。
3 测试环境
为防止外界磁场的干扰,将传感器放在磁屏蔽中进行测试,如图4。在放入传感器之前,给磁屏蔽筒通过16 A 的强电流消除剩余磁场,使筒内净磁场小于2 nT。
要测量传感器的精度和线性度,需要改变被测磁场大小。亥姆霍兹线圈是由一对相同半径的载流圆线圈组成,其轴线中心点附近产生较宽范围的均匀磁场,磁场与供电电流有很好的线性关系,使用磁场空间有很宽的均匀区,常用作弱磁场检测的匀强标准磁场[8,9]。通过LabVIEW 和GPIB 总线,控制Keithley 2612B 数值源表,可以等时间等量的改变输出电流,精确控制磁屏蔽筒中磁场大小。测试过程中,每间隔2 s 使数值源表输出增加或减少1 mA。

图4 测试环境Fig 4 Test environment
4 测试结果与分析
总磁场是各分量磁场的矢量和,容易产生累积误差,在零磁场环境中所测总磁场大小在0.3 μT 左右。采用Lab-VIEW 校准后,各分量与总磁场结果如图5 所示。在磁屏蔽筒中,由于每个传感器分辨率在15 nT,所以,各轴测量值以0 基线上小幅度跳动,误差的非对称分布主要与磁传感器装配的角度误差有关。由于总磁场不考虑方向,直接计算分量磁场的矢量,误差具有累积的趋势,大小集中在0 ~40 nT 之间。
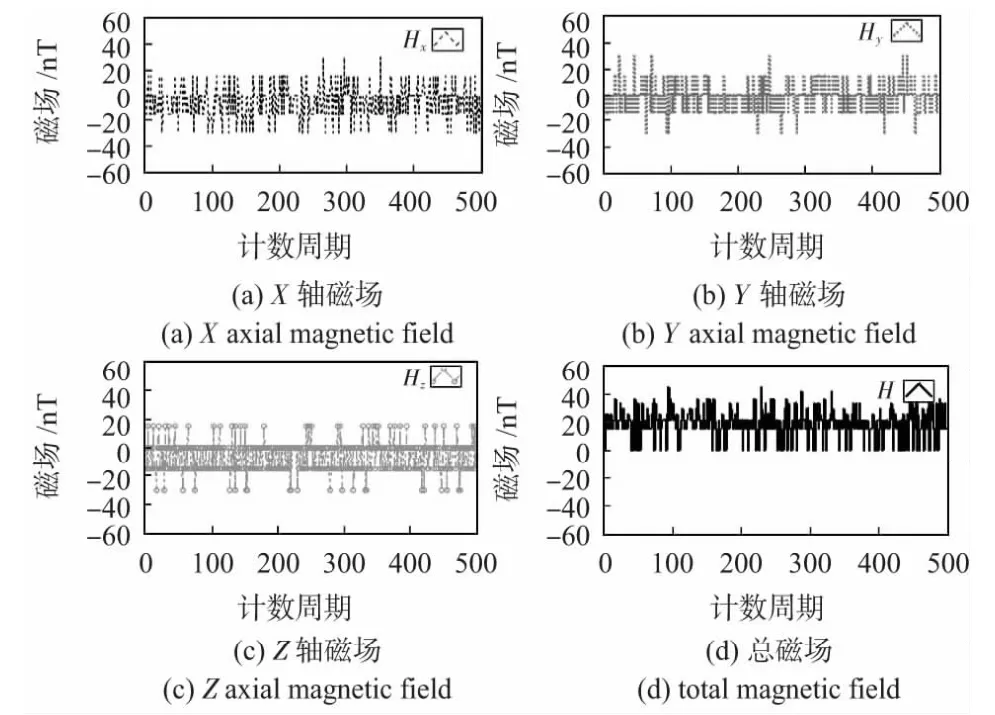
图5 校准后三轴磁场与总磁场大小Fig 5 Three axis magnetic field and total magnetic field size after calibration
在磁屏蔽筒中,由电流源表Keithley 2612B 给亥姆霍兹线圈加-10 ~10 mA 电流,使其Y 轴方向产生变化的磁场[10],分别利用Origin 8 和LabVIEW 对数据进行线性度分析,都采用最小二乘法,校准数据的残差平方和最小。由图6(a)和图6(b)可以看出:两者前端基直线斜率为-2.742 26,-2.742 3,截距为-3.848 68,-3.848 7,相比较两者处理的结果相近。

图6 Origin8 和LabVIEW 线性拟合处理图ig 6 Linear fitting processing diagram of Origin8 and LabVIEW
在磁屏蔽筒外,利用传感器测量当地磁场大小如图7所示,测量过程中,在硬件平台上不停的翻转传感器,稳定显示当地磁场大小为40μT,证明本系统可以正确测量空间某范围内的磁场。
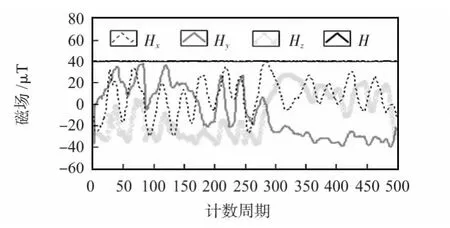
图7 当地磁场测量Fig 7 Local magnetic field measurement
5 结 论
本文设计了一种三轴微弱磁场检测系统,利用Lab-VIEW 编写的上位机程序,具有数据图形和表格显示、保存、回放、线性度分析等功能,修正多轴矢量传感器零偏误差,该磁场传感器结构简单、工作稳定、线性度良好、分辨率达15 nT。此三轴微弱监测系统可广泛运用到高精度电子罗盘、停车场车位检测、交通车辆检测[11]。
[1] 林乾浩,钱正洪,龚天平,等.基于GMR 传感器的三轴电子罗盘[J].机电工程,2013,30(1):55-59.
[2] 马学东,吴傍斌,林培立,等.基于PNI 传感器的电子指南针[J].电子设计工程,2011(12):181-183.
[3] 杜广涛.新型MEMS 磁敏传感器的研究[D].成都:西南交通大学,2011.
[4] 蔡文智,陈德为.基于LabVIEW 的高速数据采集系统[J].电子工程师,2008,34(5):72-73.
[5] Zhou Jianjun,Lin Chunsheng,Fu Kang.A method for real-time compensation of moving ferromagnet’s magnetic moment[J].Journal of Magnetism and Magnetism and Material,2013,32(5):130-134.
[6] Da Luz,Jeanine M.A measurement system utilising magnetoresistive sensors[J].International Journal of Applied Electromagnetics and Mechanics,2004,19(4) :93-97.
[7] Kaplan Ben-Zion,Paperno Eugene.New method for extracting signals generated by magnetoresistive sensors[J].IEEE Transactions on Magnetics,1994,30(4):4614-4616.
[8] 刘艳霞,李希胜,窦晓霞.基于椭球假设的三轴磁强计标定算法改进[J].计算机测量与控制,2013,21(6):1590-1593.
[9] 李 勇,李文怡,李 杰,等.基于椭球拟合的三轴磁传感器误差补偿方法[J].传感技术学报,2012,25(7):917-920.
[10]葛丽丽,王劲东.高性能三分量磁阻磁强计[C]∥第二十四届全国空间探测学术交流会,西安,2011.
[11]何志强,罗 飞,于峰崎,等.基于地磁传感器的车辆检测算法[J].科学技术与工程,2014,14(15):203-206.
