基于UML 和Petri 网的网络化传感系统模型研究*
2015-03-30刘建航程学珍魏翠丽崔立文
刘建航,程学珍,2,郑 宸,魏翠丽,崔立文
(1.山东科技大学 电气与自动化工程学院,山东 青岛266590;2.山东科技大学 矿山灾害预防控制省部共建国家重点实验室培育基地,山东 青岛266590)
0 引 言
网络化传感系统是由多个传感器节点元件通过有线或无线通信方式连接到网络系统,以实现网络区域传感信息的感知、采集、传输、处理等功能[1]。当前,IEEE 1451[2]成为构建网络化传感系统的技术手段,而传感系统建模则是其网络化开发的前提。因此,研究一种通用的网络化传感系统模型是非常有必要的,也是当前所亟需的。
本文研究了一种网络化传感系统模型,该模型的建立能实现网络传感系统快速化、标准化。
1 系统整体建模
目前,在主流的建模语言中,统一建模语言(unified modeling language,UML)[3]是一种面向对象的建模语言,是一种定义良好、易于表达、功能强大且普遍实用的可视化建模语言,在静态结构描述能力和面向对象设计思想中具有较大优势,因此,非常适合应用于基于IEEE 1451 网络化传感系统的模型构建中,但是其缺乏有效验证分析方法[4],而Petri 网正好弥补这一缺陷。与UML 相比,Petri 网[5,6]具有形式化定义,能够提供多种验证分析方法,在动态行为分析方面具有较大优势,但其建模方法不够直观明确,在获取需求,交互方面较差。因此,本文将UML 建模和Petri 网建模两者结合起来,采用基于UML 和Petri 网的信息流层次化动态(information flow hierachical dynamic,IFHD)建模方法[7],这样既能够满足获取有效需求、分析设计,同时又能够进行严格建模和形式化验证,以达到其准确,直观,以致达到节约时间,提高效率。
图1 中建模过程中分为静态建模、系统部署图、动态建模行为验证,利用UML 用例图、顺序图及部署图对系统进行静态描述,再利用UML 与Petri 网的转换规则转换为Petri 网模型,经过动态行为验证,对模型简化和优化。

图1 基于UML 和Petri 网建模原理图Fig 1 Modeling principle diagram based on UML and Petri networks
2 UML 静态建模
2.1 UML 用例图模型构建
在系统的静态建模中,主要是利用UML 的优势[8,9]来构建的。
1)系统结构
网络传感系统的功能是完成数据的采集、处理和传输,参与者有本地操作者、远程操作者。除此之外,还有现场传感器实现信息的采集;执行元件对远程操作者发送的控制命令进行执行。
2)需求分析
系统是为本地操作者和远程操作者服务,因此,需要分别从本地操作者、远程操作者、传感器和执行元件的角度来实现系统需要的具体功能。
3)确认用例
根据需求得到的用例并非适于在用例图中出现,用例间总是存在着各种关系,如泛化、包含和扩展等关系。经过用例的分析找出用例间的关系和适合在用例图中使用的用例,如图2 所示。

图2 网络化传感系统用例图Fig 2 Use-case of networked sensing system
4)确定用例间的关系
根据IEEE 1451 技术标准的定义,NCAP 和STIM 能够包含的用例如图3 和图4 所示。

图3 NCAP 模块用例间的包含关系图Fig 3 Use-case diagram between NCAP module contains relationship

图4 STIM 模块用例间的包含关系图Fig 4 Use-case diagram between STIM module contains relationship
5) 网络化传感系统用例图
在用例关系确定后,查看最终的用例与参与者的关系。其中,当地操作者、传感器和执行元件都需要操作STIM 模块;远程操作者需要操作NACP 模块。结合上面两个图,网络化传感系统用例图如图5 所示。

图5 网络化传感系统用例图Fig 5 Use cases of networked sensing system
2.2 UML 顺序图模型构建
UML 的交互图描述了系统的实际运作过程,在确定系统的用例之后,需要运用交互图描述系统对象的的实际运作和交互。交互图有3 种,即顺序图、通信图和时间图,其中顺序图的应用最为广泛,本文模型设计中采用顺序图对系统的实际运作进行描述。
顺序图根据具体用例的对象,描述对象之间的交互和交互发生的次序。
1)远程操作者与系统的交互:与远程操作者交互的用例有:网络通信、初始化、数据采集、数据处理、TEDS 配置、输出控制。远程操作者与系统的交互顺序图如图6 所示。

图6 远程操作者顺序图Fig 6 Sequence diagram of remote operator
顺序图中:a.纵向轴为时间信息轴,纵向轴向下为正方向;b.用例协作中各独立对象的类元角色在横向轴表示;c.表明一个对象在一段时间内存在,用一条虚直线表示对象生命;d.从一个对象生命线指向另一个对象生命线的箭头表示消息事件的发生。
2)本地操作者与系统的交互:与本地操作者交互的用例有:系统初始化、数据采集、数据处理、TEDS 配置。本地操作者的顺序图可以从远程操作者顺序图中分析处理,另外,传感器和执行元件的顺序图也包含在远程操作者的顺序图中,此处均不再另行绘制。
3 系统部署图
基于IEEE 1451 技术标准的网络化传感系统使用面向对象系统,面向对象系统在物理方面建模的实现方式图有两种,即组件图和部署图。本文中模型设计采用部署图对系统进行面向对象的建模,基于IEEE 1451.2 标准的网络传感系统的组件主要有:变送器接口、信号调理转换、TEDS、微处理器、存储单元、IEEE 1451.2 接口、驱动单元、网络接口、Web 服务器。
部署图用来建模系统的物理部署,主要涉及物理结构与它们间的关系。网络传感系统的使用者为远程操作者和本地操作者,图7 可以清晰地看出系统的部署图。
网络化传感系统的物理结构有:NCAP 模块和STIM 模块。其中,NCAP 模块提供网口给远程操作者,STIM 模块提供端口给本地操作者。
至此,网络化传感系统的静态模型和系统部署图已经建立。在静态建模过程中,首先对所要建模系统的功能进行分析,确定模型的角色和用例,以及各角色和用例之间的关系。之后,绘制网络化传感系统的顺序图,对所设计系统工作时的信息流进行详细的表述,对系统内部信号流向有了精确的表述。通过部署图对系统进行物理方面的建模,确定了系统各模块以及模块内部各个组件之间的关系,使系统模型的静态表述更趋完善,为动态模型建立进行形式化验证做好铺垫。

图7 基于IEEE 1451 网络化传感系统部署图Fig 7 Deployment diagram of networked sensing system based on IEEE 1451
4 Petri 网动态建模
在设计系统时,首先要识别构成系统的元素,尤其是识别被动元素和主动元素。Petri 网对这种二元性提供了强大的支持。系统中的一个对象是作为主动元素还是被动元素来建模是根据系统中的前后关系确定的。主要由Petri网中的两类元素[14]:P 元素和T 元素完成。UML 元素与Petri 网图像元素的映射如表1 所示。

表1 UML 元素与Petri 网图像元素映射表Tab 1 Mapping tab of UML elements and Petri networks elements
通过两者之间的映射关系,把系统的UML 用例图转换为Petri 网模型,转换后的图形如图8 所示。
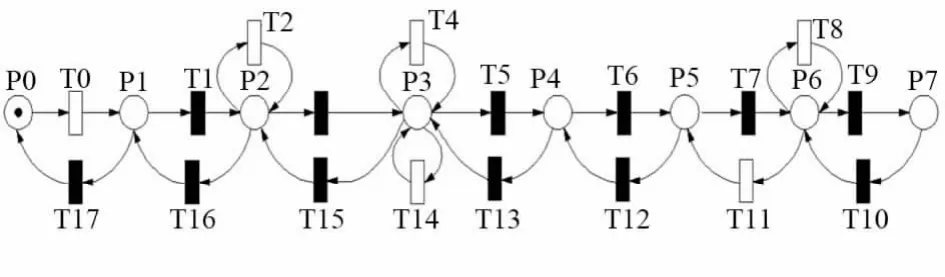
图8 网络化传感系统Petri 网模型Fig 8 Petri networks model of networked sensing system
5 系统模型的简化与优化
通过搭建的动态模型可以对系统的动态行为进行分析。通过分析,在系统内部信号处理方面的动态行为表述的不是十分明确,系统模型还需要进一步的简化与优化,简化后的系统Petri 网模型如图9 所示。利用CPN Tools 可以对网络智能化传感系统模型进行分析,能够确认出所建立的模型结构不存在死锁,是可逆的,具有可达性、有界性。

图9 优化后的网络化传感系统Petri 网模型Fig 9 Optimized Petri networks model for networked sensing system
6 结 论
本文采用UML 和Petri 网相结合的方法对网络传感系统进行模型搭建。考虑到UML 在静态建模方面的优越性,利用UML 对系统的静态特性进行表述;同时,利用UML 到Petri 网的转换规则,得到系统的动态模型,利用Petri 网在动态行为上的优势对系统的动态行为进行分析、优化与简化,最后得到网络化网络传感系统的模型,能够为后续智能传感器的性能分析、管理决策、数据仿真、优化分析提供技术支持。
[1] Gurkan D.Interoperable smart sensor networking[C]∥12th International Conference on Engineering,Science,Construction,and Operations in Challenging Environments,2010:1634-1643.
[2] 刘桂雄.基于IEEE 1451 的智能传感器技术与应用[M].北京:清华大学出版社,2012.
[3] Docherty M O.Object-oriented analysis and design:Understanding system development with UML 2.0[M].Chichester:John Wiley&Sons,2005.
[4] 付茂洺,王 悠.可视化UML 模型验证环境研究[J].电子科技大学学报,2010,39(2):289-292.
[5] Zairi S,Zouari B,Niel E.Coloured Petri net model for the formal validation of sensor networks[C]∥1st International Conference on Sensor Networks and Applications(SNA2009),2009:148-153.
[6] Shareef A,Yifeng Z.Energy modeling of wireless sensor nodes based on Petri nets[C]∥39th International Conference on Parallel Processing,ICPP 2010,2010:101-110.
[7] 周岳斌.IEEE 1451 混合接入模式下网络化智能传感系统建模与实现[D].广州:华南理工大学,2012.
[8] Lee K B,Song E Y.Object-oriented application framework for IEEE 1451.1 standard[J].IEEE Transactions on Instrumentation and Measurement,2005,54(4):1527-1533.
[9] 黄国健,刘桂雄,洪晓斌,等.IEEE 1451 网络化智能传感器的通用建模方法及应用[J].光学精密工程,2010,18(8):1914-1921.
[10]杨玉梅,刁永锋.基于UML 顺序图的Petri 网建模[J].计算机技术与发展,2007(10):130-133.
