无源传感器对雷达目标指示中触发准则研究*
2015-03-30王维佳许蕴山郝文渊权彦宁
王维佳,许蕴山,杨 涛,郝文渊,权彦宁
(1.空军工程大学 航空航天工程学院,陕西 西安710038;2.西安财经学院,陕西 西安710100)
0 引 言
作为多传感器协同的重要方式,指示交接技术基本思想是通过误差较大、占用资源较少的传感器引导精度高、资源消耗大的传感器,从而在有限的传感器资源下尽可能提高目标信息的完整性与可靠性。因此,指示交接技术的作用主要体现在如下两个方面[1]:一是引导其他传感器迅速截获目标,为融合系统提供目标的详细信息;二是当传感器无法完成对目标的连续探测时,通过将任务移交给其他传感器处理,确保目标持续可见或丢失后快速重新锁定。
对于目标的指示交接问题,文献[2]首先通过传感器探测性能给出了红外探测与跟踪系统(IRST)对3D 雷达的成功指示概率。在此基础上,文献[3,4]基于指示概率分别研究了异地配置下电子支援措施(ESM)、IRST 对雷达的指示方程与指示性能。文献[5]考虑了在多目标干扰情况下指示交接问题,提出了雷达指示目标的最优搜索波位编排。这些文献都是基于概率的思想侧重于对指示交接的方法与性能的研究,而对于目标的指示过程的自主化、智能化执行机制鲜有涉及。
本文重点针对在多传感器协同跟踪中目标指示的触发准则展开研究,首先进行了目标指示交接的需求分析,其次在目标跟踪过程依据各传感器特性建立顺序处理结构的多传感器融合跟踪模型,将基于协方差控制理论应用到的传感器资源调度中,建立无源传感器对雷达的目标指示触发准则,并进行仿真验证。
1 协同跟踪中的目标指示交接需求分析
多传感器协同跟踪是通过一定准则使系统能够根据任务需求和外界环境自适应地优化传感器资源配置,从而最大程度地发挥多传感器系统的跟踪效能[6]。例如:在多传感器多目标跟踪中,首先应当选择跟踪效果好、资源消耗少的传感器组合;其次为减少电磁辐射被截获的可能性,应可能利用无源传感器;如果当前传感器的跟踪精度达不到要求或者目标即将脱离其视域时,应将任务移交给其他传感器以保证对目标的持续观测[7]。
在实战中,传感器之间发生指示交接需要建立基本规则才能保证指示交接的效果。考虑在机载预警雷达资源(模式、功率、孔径)不足或使用受限时,传感器管理将部分或全部跟踪任务交给无源传感器处理的情况,同时保证在维持战场态势感知能力的前提下尽可能减少对雷达的依赖。因此,协同跟踪中的目标指示交接建立在机载无源传感器(ESM,IRST)与相控阵雷达协同的基础上,通过量化指示交接触发的准则明确发生指示交接的最佳时机,从而实现机载预警雷达最佳的时间资源分配和空间功率分配。
2 基于协方差控制的传感器资源调度方案
协方差控制的是从跟踪问题的本质入手,使实际协方差逐渐逼近期望协方差,以对跟踪精度的直接控制。从提高跟踪中传感器管理效果的角度,文献[8,9]研究了基于协方差控制的传感器资源调度方案。
如图1 所示是分布式融合系统中基于协方差控制的多传感器管理结构,其中,Pd为期望协方差,p(k)为k 时刻滤波器输出的估计误差协方差,算法通过p(k)与Pd间的差异确定传感器资源的调度策略。初始时刻滤波器输出的状态估计误差较大,随着算法迭代能够使p(k)逐渐逼近Pd,说明滤波器输出状态估计的精度逐渐趋近于期望的跟踪精度,从而实现了对跟踪精度的直接控制。
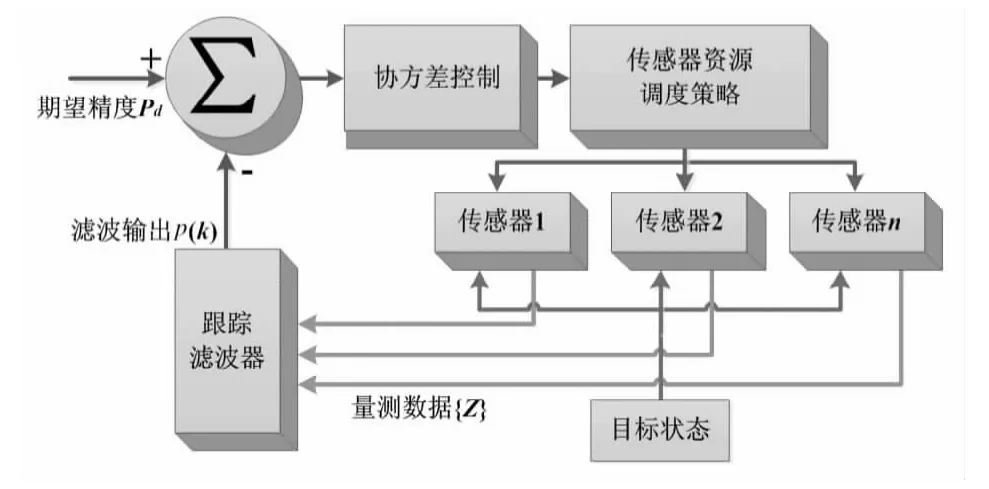
图1 协方差控制的传感器管理结构图Fig 1 Sensor management structure under covariance control
3 雷达、红外、ESM 交互滤波模型
基于协方差控制的传感器资源调度方案必须获得较为准确的状态估计误差,但由于目标辐射电磁波的发射时机具有随机性和不连续性,因此,ESM量测是间歇的;如果目标距离较远或飞行姿态不断发生变化时,红外传感器只能得到断断续续的量测。综合考虑以上两点,实际情况下无源传感器的数据率是不稳定的。一般在多传感器融合跟踪中利用内插外推法实现各传感器量测数据的时间对准,但考虑到无源传感器缺少对距离的量测会使得递推结果存在较大误差,因此,本文采用顺序处理结构的集中式融合跟踪模型[10]对误差协方差进行预测。
3.1 多传感器融合跟踪结构
在单平台数据融合系统中,各传感器之间距离较近且相对之间没有位移,因而,本文将以载机为原点的极坐标系转换为载机地理坐标系进行融合跟踪。
如图2 所示是一种顺序处理结构的集中式融合跟踪模型,假设由雷达量测数据能够获得目标在初始时刻的状态,各传感器在此基础上根据量测数据到达的时间顺序进行集中式滤波,对于没有量测数据时的目标状态通过离线预测得到。考虑到传感器量测的非线性,本文采用基于IMMEKF 的融合跟踪算法。
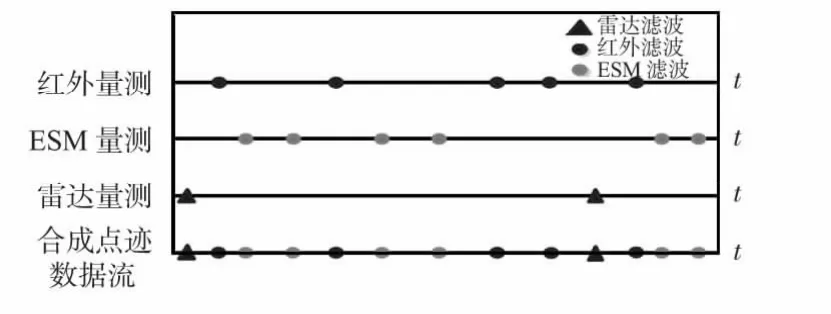
图2 顺序处理结构的集中式融合跟踪模型Fig 2 Centralized fusion tracking model under sequential processing structure
3.2 基于IMM-EKF 的融合跟踪算法
如图3 是基于IMM-EKF 的融合跟踪算法示意图,算法将目标初始状态和协方差作为输入,通过递推依次求得下一时刻的目标状态估计和误差协方差估计。

图3 滤波算法递推流程Fig 3 Recursive flow of filtering algorithm
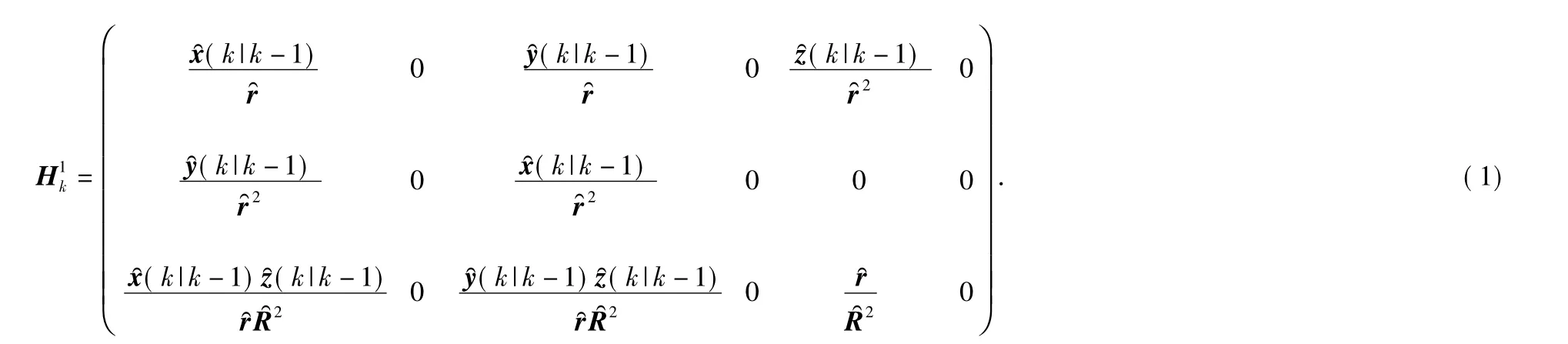
对于雷达量测
对于ESM,IRST 量测

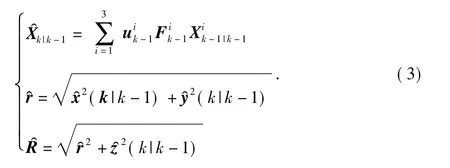
其中
4 目标指示触发准则的建立
根据目标跟踪理论,如果选择的机动模型与目标实际运动状态相匹配,滤波器输出的误差协方差会逐步收敛到稳态,这在统计意义上这表明滤波器的状态估计与目标真实状态之间的差异越来越小。
考虑到滤波误差协方差反映了传感器的跟踪质量,因此,借助协方差控制的思想能够对无源传感器与雷达的目标指示交触发条件进行量化,即通过预测误差协方差与预设的误差上限进行比较从而判断目标是否存在指示交接需求,并由此求解出目标指示最佳的触发时机。
图4 是多传感器协同跟踪中的指示交接触发准则示意图。目标的状态估计误差协方差预测由上述滤波算法得到,当算法输出的状态估计误差超出了预设的误差上限时认为目标存在指示交接需求,此时需要通过无源传感器的目标指示牵引雷达对当前的跟踪结果进行修正。
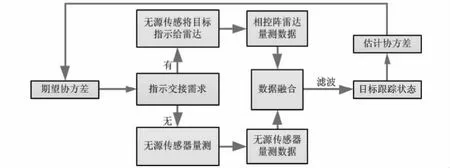
图4 指示交接触发准则示意图Fig 4 Sketch map of cueing and handoff triggering criterions
因此,将目标指示的触发条件量化为


误差门限Pth定义为

其中,指示交接控制因子λ 反映了任务对跟踪精度的要求,Rradar是在极坐标下雷达的量测误差协方差矩阵。由于是在载机地理坐标系下输出的误差协方差,因此,需要将其变换到极坐标系下才能与误差门限进行比较


因此,协同跟踪中的目标指示触发准则定义为
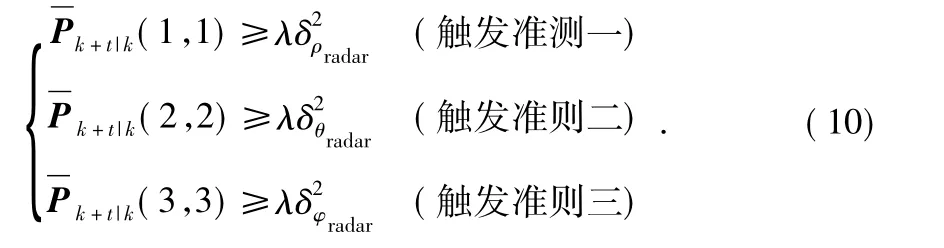
目标指示触发时机的确定就是要在k 时刻求解满足式(4)的t,规定如果k 时刻的预测误差协方差满足式(10)中的任一条件,那么,经t 时间之后无源传感器将通过目标指示对雷达进行引导。考虑到直接求解t 的困难较大,本文通过递推的方式对t 进行求解,算法流程如图5。
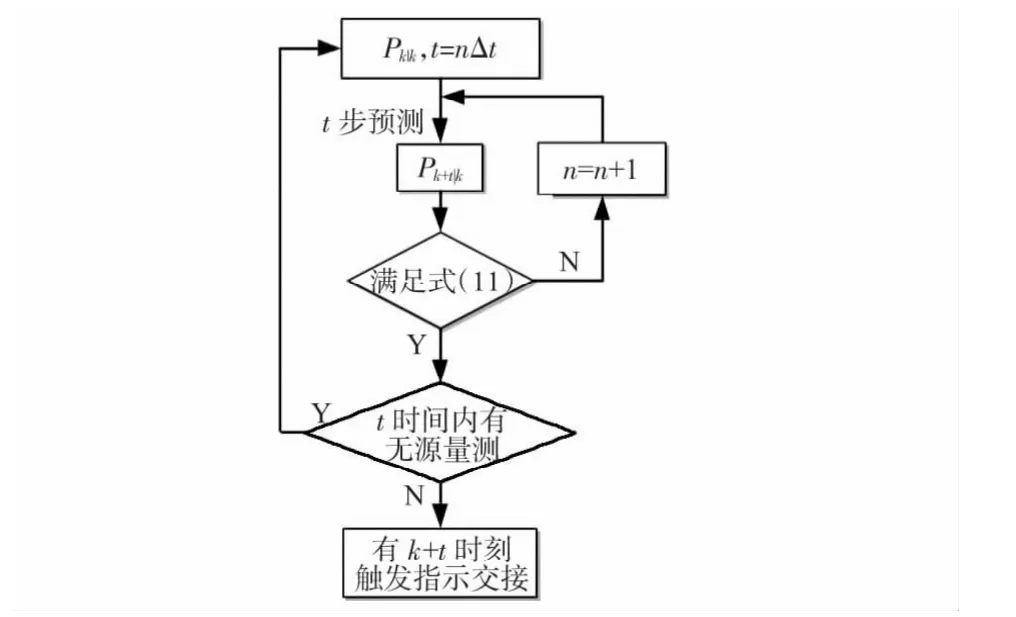
图5 指示交接触发时机的递推流程Fig 5 Recursive flow of cueing and handoff triggering timing
5 目标指示触发条件的仿真验证与分析
5.1 仿真环境设置
在直角坐标系下建立预警机与目标的运动状态,假设预警机起始位置为(0,0,10)km,以速度100 m/s 沿x 轴正方向飞行;目标起始位置为(300,150,0.4)km,在x,y,z 方向的初始速度为(-300,0,80)m/s,仿真时间设置为100s,表1 列出了目标在不同时刻的状态。
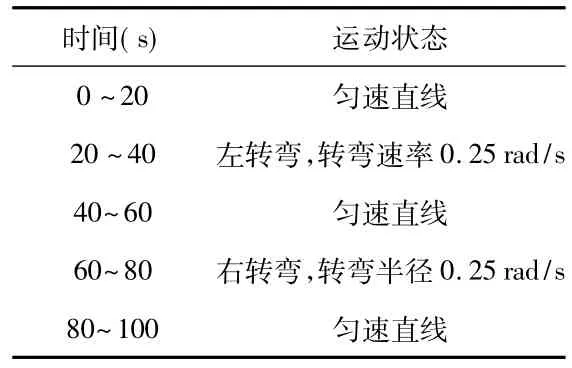
表1 目标运动状态Tab 1 Motion state of targets
假定雷达、ESM、IRST 角度量测的均方误差为分别为0.2°,0.3°,0.1°,雷达距离量测的均方误差为100 m,无源传感器量测数据更新的最小间隔为0.5 s,目标状态经雷达起始后由IRST 和ESM 进行跟踪。
5.2 模型参数设置
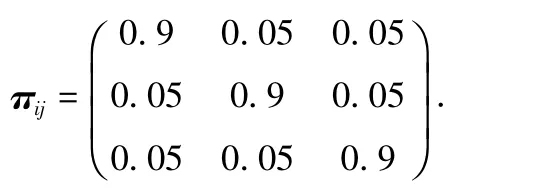
仿真基于IMM-EKF 序贯滤波算法进行目标跟踪,机动模型采用一个CA 模型和两个CT 模型,其中,CT 模型表示联动式左转弯和右转弯,各模型的初始概率为

模型间的转移概率
模型系统误差
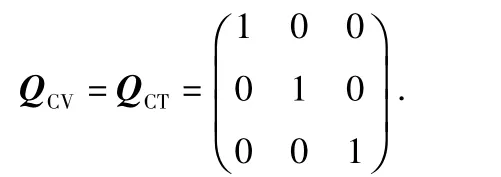
雷达,ESM,IRST 的量测误差分别为

5.3 结果与分析
仿真在三种情况下分别从“无源传感器量测数”和“指示交接控制因子”两个角度讨论目标指示触发时机的影响因素。
情况1ESM 与IRST 分别获得50 个量测点迹,令λ=1.5,传感器的量测时序如图6,跟踪轨迹如图7。
仿真在第20 拍时无源传感器对雷达的目标指示被触发。如果通过引导雷达使目标的距离、方位、俯仰误差收敛到了允许的范围内,则本次指示交接完成,跟踪任务继续由无源传感器执行。这里由于设置了较高的跟踪精度(λ=1.5),目标指示被触发后跟踪任务需要持续占用雷达资源,因此,图7 中的跟踪轨迹与目标真实状态的差别较小。
情况2无源传感器量测点迹数不变,令λ=3,传感器的量测时序如图8,跟踪轨迹如图9。

图8 传感器量测时序Fig 8 Measurement sequence of sensors

图9 跟踪轨迹Fig 9 Trajectory of tracking
相比情况1,增大λ 意味着降低对跟踪精度的要求,当目标不做机动时无源传感器的跟踪基本能够满足对精度要求,因此,目标指示被触发的次数相对减少,只有在目标在两次转弯的过程雷达资源才被持续占用。如图9 所示跟踪轨迹与目标真实状态的差异较大,说明增大λ 导致了跟踪质量下降明显。
情况3ESM 与IRST 分别获得80 个量测点迹,令λ=3,传感器的量测时序如图10,跟踪轨迹如图11。

图10 传感器量测时序Fig 10 Measurement sequence of sensors

图11 跟踪轨迹Fig 11 Trajectory of tracking
增加ESM 和IRST 的量测数据能够提高无源传感器的跟踪精度,从而降低对雷达资源的需求,因此,目标指示被触发的次数相比情况2 时虽然大幅减少,但跟踪质量却明显提高,说明增加无源传感器的量测点迹能够在保证跟踪质量的前提下减少目标指示被触发的次数。
对比前两种情况下的仿真结果,λ 能够改变无源传感器对雷达的目标指示时机,λ 越小意味着对精度的要求越高,因此,目标指示被触发的次数越频繁,增大λ 会减少目标指示被触发的次数,但同时也会带来跟踪精度损失,过大的λ 还会导致跟踪发散;对比后两种情况下的仿真结果,无源传感器量测数也能够对目标指示的触发时机产生影响,对于相同的指示交接控制因子,无源传感器量测数据的增加能够在保证跟踪质量的前提下减少目标指示被触发的次数。
综上所述,基于协方差控制的指示交接触发准则下,控制因子λ 和无源传感器的量测数都能够影响目标指示的触发时机,实际应用中为避免指示交接被频繁触发,应当综合考虑任务需求和无源传感器的量测数据率对λ 做出合理的定义。
6 结 论
本文建立了协同跟踪中的目标指示触发准则在于判断目标的指示交接需求,并确定目标指示发生的最佳时机。首先,分析了无源传感器与雷达协同跟踪中的指示交接需求,其次,针对跟踪中的传感器资源调度问题引入了协方差控制的思想,通过一种顺序处理结构的集中式融合跟踪模型解决了有源、无源传感器协同中误差协方差难以准确递推的问题,然后,在此基础上建立了无源传感器对雷达的目标指示触发准则,并给提出最佳指示时机的求解算法,最后,通过仿真对触发准则进行了验证并讨论了目标指示触发时机的影响因素,解决了无源传感器对雷达的目标指示自发进行的问题。
[1] 栗 琼.机载多传感器管理算法初探与研究[D].西安:西北工业大学,2005.
[2] 王国宏,何 友,毛士艺.IRST 对3D 雷达引导性能分析[J].电子学报,2002(12):1738-1740.
[3] 彭锐晖,王树宗,吕永胜,等.异地配置下ESM 对2D 雷达的引导分析[J].现代雷达,2009,31(1):13-16.
[4] 吕永胜,王树宗,彭锐晖,等.异地配置下IRST 对3D 雷达的引导分析[J].红外与激光工程,2008,37(5):911-915.
[5] 张华睿,杨宏文,郁文贤.多目标情况下IRST 和雷达的指示交接问题[J].电子与信息学报,2011,33(5):1101-1106.
[6] Benaskeur A,Irandoust H.Sensor management for tactical surveillance operations[R].North Quebec City:Defence R&D Canada,2007:37-38.
[7] 杨秀珍,何 友,鞠传文.传感器管理的结构与微观传感器管理仿真[J].系统工程与电子技术,2004(11):1581-1584.
[8] 杨 涛,许蕴山,肖冰松,等.基于效能函数的自适应传感器跟踪资源分配[J].电光与控制,2014(8):63-67.
[9] Gillard J.Asymptotic variance covariance matrices for the linear structural mode[J].Statistical Methodology,2011,8(3):291-303.
[10]吴 巍,王国宏,李世忠.雷达间歇辅助下雷达红外协同跟踪技术[J].火力与指挥控制,2012(1):156-158.
[11]唐书娟,许蕴山,肖冰松.无源传感器引导AESA 雷达目标搜索[J].空军工程大学学报:自然科学版,2015,16(3):35-41.
