基于多模型表示的高分辨率遥感图像配准方法*
2015-03-30项盛文文贡坚伍颖佳
项盛文,文贡坚,高 峰,伍颖佳
(国防科技大学 电子科学与工程学院ATR 重点实验室,湖南 长沙410073)
0 引 言
图像配准是将不同时刻、不同视角或者不同传感器获取的某一地域的图像进行几何校正,使其在空间位置上一一对应的技术[1],是进行图像匹配、图像分类、变化检测、影像重建等任务中的关键步骤[2~5]。传统的图像配准,一般假定两幅图像之间的几何形变符合某种统一的变换模型,通过解算两幅图像之间的同名特征进而求解变换模型的参数。高分辨率遥感图像提供了地物更加精确的信息,尤其当图像的分辨率达到米级或者亚米级时,地形起伏和地物高程引起的像点位移不能简单的忽略,由于局部区域的形变的存在,难以通过一个统一的模型对两幅图像之间的几何形变进行描述。
本文针对高分辨率大型固定设施遥感图像,提出了一种基于多模型表示的图像配准方法,通过两步配准完成图像的精确校正。在初配准阶段,引入一个整体的模型完成固定设施内部大部分平坦区域的校正;在精配准阶段,对固定设施内部高程区域建立局部模型完成局部校正。图像之间的变换模型由整体模型和局部模型共同表示。本文提出的方法从理论上更加符合高分辨率遥感图像的特点,有较强的适用性,具备一定的研究价值。
1 遥感图像配准方法
1.1 地形起伏因素对配准精度的影响
在基于区域的匹配方法中,通常假定地表处于同一水平面上,这在中低分辨率遥感影像中具有一定的可行性。高分辨率遥感影像中,地形起伏和地物高程不能简单的忽略,将处于同名位置的两幅影像块投影到高低不平的地表,其单个的像元仍然是不同名的。地形起伏对配准的影响如图1。

图1 地形起伏对区域匹配的影响Fig 1 Influence of hypsography on area matching
在图1(b)中,深色区域是精匹配后的同名像素,受地形起伏的影响,它们对应于物方空间不同的区域,实际上并不是同名像素。而位于同一水平面上的像素,其匹配位置受地形起伏的影响较小。
1.2 图像初配准
影像初配准的主要实现固定设施中大部分平坦区域的校正,建立整体模型。目前,常用的配准方法可以分为基于灰度的方法和基于特征的方法两大类。本文在基于灰度的方法基础上,在固定设施内部建立一定数量的控制点,通过引入控制点间的几何关系限制来提高匹配的效率和精度,取得了较好的匹配效果。
1)采用动态模板匹配算法[6]完成前两个控制点的匹配,具体的匹配过程如图2 所示。

图2 动态模板匹配过程Fig 2 Process of dynamic template matching
对于待匹配控制点p1,根据地理坐标信息可以获取其初始匹配位置p'1,在基准图像中取以p1为中心半径为r1的邻域窗口构造模板图像,在待配准图像中取以p'1为中心r'1为半径的邻域窗口构造搜索子窗口,以s0作为按行列搜索的步长进行模板匹配,计算模板图像与匹配窗口之间的互相关系数,取每次相关系数最大的匹配窗口作为下一次搜索的子窗口。模板与搜索子区的半径大小和行列搜索步长随着每一次匹配动态递减,当第k 次搜索的步长sk为1 时结束模板匹配,此时匹配窗口的中心位置即为该控制点的匹配点。为克服方向因素的影响,算法选用圆形模板。
2)获取前两个控制点的匹配点后,以第一个控制点为根节点,第二个控制点为起始节点,解算其余每个控制点与前两个控制点的距离比和角度分量,构造控制点网络,如图3所示。
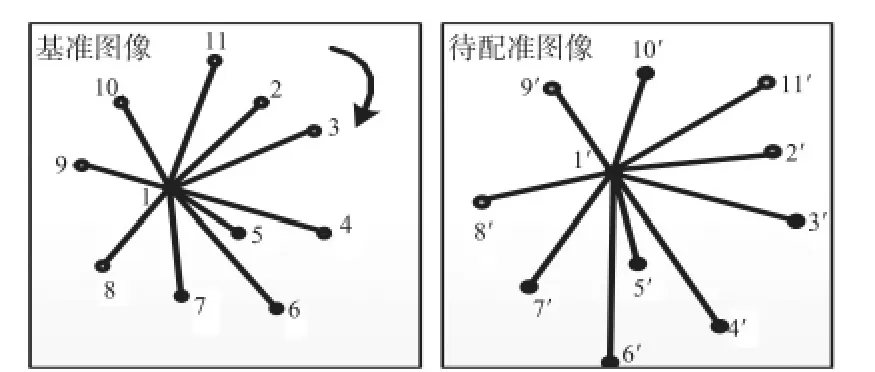
图3 构造控制点网络Fig 3 Construction of control points network
3)在待配准图像中,根据前两个控制点的匹配位置以及每个控制点的距离比和角度分量解算得到一个初匹配位置,以这个初匹配位置为中心,进行局部区域的模板匹配,获取其余每个控制点的精确匹配位置,具体的过程如图4所示。

图4 第i 个控制点匹配过程Fig 4 Matching process of the number i control point
引入控制点网络约束条件,可以有效减小模板搜索的范围,提高匹配的效率。同时,在准确值附近进行模板搜索可以避免传统模板匹配结果收敛到次优值或者需要经多次迭代才能收敛到最佳匹配值的情况,进而提高匹配的精度。
1.3 图像精配准
经过初配准后,建立了固定设施中大部分平坦区域的变换模型,在这个模型下局部地形起伏明显区域仍存在部分偏差,精配准的主要任务是实现局部区域的校正,具体的流程如图5 所示。

图5 影像精配准流程Fig 5 Fine registration flow of image
本文通过在地形起伏区域建立数个控制点,用于局部精配准。直接进行控制点匹配,受地形起伏影响可能得不到精确的匹配位置,在此,引入控制点影像。对于基准图像中的每一个控制点pi,以该点为中心构造目标区域,根据初配准参数可以得到该控制点在待配准图像中的匹配位置p'i,以为中心构造搜索区域图像,考虑此时图像间可能存在小量的平移和旋转,引入虚拟三角形匹配方法进行图像匹配,进而解算得到pi的匹配位置。文献[7]通过三角形边长的全等性测度判定两幅图像中的三角形是否匹配,然而,单纯依靠边长的条件不能完全解决三角形匹配问题,例如:两个全等三角形经过平移或者旋转仍然是全等的。本文在其基础上引入了斜率相似性测度S2解决旋转问题和每个角点局部区域相似性测度S3解决平移问题,分别如式(2)和式(3)所示


当S1,S2和S3同时满足相似性条件则认为此时获得最佳匹配的三角形,并利用匹配的三个顶点进行精配准参数的解算。
2 实验结果
采用VC++6.0 编写算法程序,在Dell(3.40 GHz,16 GBRAM)环境下对算法进行了测试,包括图像初配准和精配准两个阶段。
2.1 图像初配准实验结果
选取QuickBird 下上海浦东国际机场遥感图像用作测试,如图6 所示。基准图像图6(a)拍摄于2012 年5 月27 日,待配准图像图6(b)拍摄于2012 年10 月14 日。在固定设施中共建立了13 个控制点,构建的控制点网络与控制点匹配结果分别在基准图像和待配准图像上进行了显示,图像初配准结果如图6(c)所示。

图6 图像初配准Fig 6 First registration of image
将本文算法与传统的模板匹配和动态模板匹配算法进行了比较,结果如表1 所示。实验表明:本文算法在匹配精度和效率上均有较大提升。
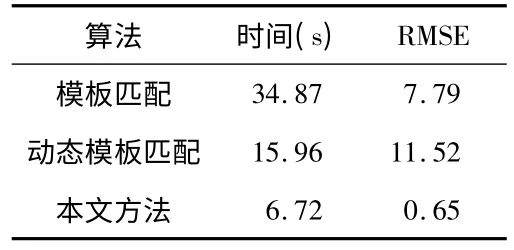
表1 图像配准结果比较Tab 1 Result comparison of image registration
2.2 图像精配准实验结果
精配准以航站楼为对象,建立的控制点如图7(a)所示,利用虚拟三角形影像匹配获得的匹配控制点图7(b)所示,引入虚拟三角形进行匹配,精配准结果如图7(c)所示。

图7 图像精配准Fig 7 Fine registration of image
3 结束语
本文提出了一种基于多模型表示的高分辨率遥感图像精确配准方法,从理论上能够解决由地形起伏引起的图像变形不一致问题。利用整体模型来校正固定设施平坦区域,利用局部模型校正固定设施内部地形起伏区域。本文对动态模板匹配算法和虚拟三角形匹配方法进行了相应的改进,使算法匹配精度和效率上有较大的提升。如何获取初配准中前两个控制点的精确匹配点是下一步研究的一个主要任务,此外如何获取更加精确的精配准模型也是值得研究的问题。
[1] Kai Z,Xu Z L,Jiu X Z.A robust point-matching algorithm for remote sensing image registration[J].IEEE Geoscience and Remote Sensing Letters,2014,11(2):469-473.
[2] Sen X X,Bao W X.The remote sensing image matching algorithm based on the normalized cross-correlation and SIFT[J].J Indian Soc Remote Sens,2014,42(2):417-422.
[3] Eva L,Moeness G A,Fauzia A,et al.Pattern matching for building feature extraction[J].IEEE Geoscience and Remote Sensing Letters,2014,11(12):2193-2197.
[4] Zou C Q,Chen S F,Fu H B,et al.Progressive 3D reconstruction of planar-faced manifold objects with DRF-Based line drawing decomposition[J].IEEE Transcation on Visualization and Computer Graphics,2015,21(2):252-263.
[5] Wang Q W,Peter M A,Shi W Z.Fast subpixel mapping algorithms for subpixel resolutin change detection[J].IEEE Transcation on Geoscience and Remote Sensing,2015,53(4):1692-1706.
[6] 邓小炼,王长耀.一种基于动态模板和等角变换的遥感影像地面控制点匹配算法[J].测绘科学,2005,30(4):51-53.
[7] 吕金建,文贡坚,李德仁,等.一种基于角点特征的图像自动配准方法[J].遥感技术与应用,2007,22(3):438-442.
