移动测量系统设计及关键技术研究
2015-03-30汪志飞姚连璧
汪志飞,姚连璧,周 冰
(同济大学测绘与地理信息学院,上海200092)
一、引 言
完整的道路信息有非常广泛的应用前景,如制作车道级道路底图,将普通的导航转变成车道级导航,提前告知司机道路的详细信息,提高行车安全性。另外,还可以利用计算机对道路信息进行处理分析,找出路面是否出现破损等情况。但是道路信息数据量庞大,利用传统的测绘手段进行信息提取费时费力,为解决此问题,本文设计并实现了一套移动测量系统。
移动测量系统(mobile mapping system,MMS)是将数字照相机、激光扫描仪、GNSS接收机与惯性测量单元组成的姿态测量单元等多个传感器集成在一个移动平台上,在基于时间同步与确定不同传感器之间的相对位置关系的条件下,自动给移动平台提供连续的定位信息,同时获取三维地理空间数据的测量系统[1]。它是一种高效数据采集的工具。
目前,移动测量系统的研究已有一定成果。1990年,美国俄亥俄州立大学制图中心成功设计了第一台移动测量系统GPSVan[2]。1994年,加拿大卡尔加里大学成功地研制了VISAT移动测量系统。在此基础上,各个国家也都研制出各自的移动测量系统。如日本拓普康公司研制的IP-S2,美国JECA公司研制的TruckMap系统,德国研制的KISS车载系统和MoSES系统等。
对移动测量系统涉及的主要技术的研究也有一定成果。周星伶对松组合与紧组合模式的精度进行了比较,明确了紧组合模式的优势[3]。为了进一步提高POS系统的定位精度,高为广等人对紧组合算法作了进一步的优化与改善,加入卡尔曼滤波与模糊自适应卡尔曼滤波等算法,增强了POS系统位置与姿态的精度与可靠性[4-5]。文献[6—7]中提到使用检校场数据,通过对比由GPS/IMU解算的外方位姿态角元素与光束法平差计算出的外方位角元素来确定仪器间的偏心角;文献[8]中提出使用全站仪直接测量结合影像数据的方法确定传感器之间的位置关系;文献[9]中基于微小转角坐标转换原理,通过人工判别的方式找到激光点云点与已知控制点的对应关系,求解坐标转换参数,从而确定传感器之间的相对位置关系。
二、传感器集成方案及实现
以现有研究成果为基础,本文中选用3台激光断面扫描仪、1台双天线GNSS接收机、1台IMU、1台360°全景相机、2个里程计与1台GPS同步时钟组建一套车载移动测量系统,该移动测量系统的目的是采集道路数据,针对这一目标,对整个系统进行了设计,设计图如图1所示。
一台扫描仪安装在车尾部分,专门提取路面信息,另外两台安装在传感器平台的两侧,一方面用于两侧地物的提取,另一方面用于车尾扫描仪的补充。GNSS天线分别安装在传感器平台前端和车尾,IMU安装在汽车内部后排座椅中间平台上,里程计分别安装在汽车两个后轮上。为了不遮挡360°全景相机的视野,选择将相机安装在汽车顶部。
系统中各个传感器连线图如图2所示。
系统工作时,所有传感器采集的数据都以文本文件保存在计算机中。GPS时钟用于实现各个传感器之间的时间同步,全景相机用于实时采集系统周围的影像信息。GNSS、IMU与里程计实现移动测量系统的定位与定姿,在有卫星信号下,GNSS可以进行实时定位;在无卫星信号下,利用IMU和里程计推算位置。IMU实时记录系统的姿态信息,里程计实时记录汽车后轮转过的角度。
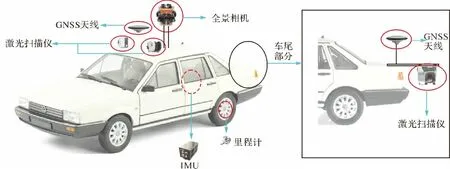
图1 移动测量系统设计图

图2 传感器连线图
三、关键技术解决方案
移动测量系统的本质是多传感器数据融合,因此系统搭建完成后并不意味着能立即投入使用,主要有两方面原因:一方面,各个传感器并不是同时进行数据采集的,则GNSS和IMU不能实时确定系统的位置和姿态信息;另一方面,各个传感器的数据采集参照的坐标系是不一样的,需要将传感器的数据统一到实际使用的坐标系中。在卫星信号良好的情况下,GNSS系统可以实时定位,但在卫星信号很差甚至没有的时候,如汽车进入隧道,GNSS系统就不能进行准确定位,如何在没有卫星失锁的情况下进行定位也是本系统需要研究的重点内容。
1.时间同步
本文中的移动测量系统中,GNSS接收机和IMU接收的数据使用GPS时,而激光扫描仪、全景相机与里程计采集到的数据并没有时间标记,故需要通过一定方式为其采集到的数据加上时间标记并统一为GPS时,从而实现时间同步。本文中使用的方法是使用一台NTP协议的GPS时钟来进行授时。时间同步的示意图如图3所示。

图3 时间同步
激光扫描仪支持NTP协议,将其通过路由器与GPS时钟连接后,可以接收GPS时间信息,并将时间标记自动加在数据尾部。全景相机和里程计连接笔记本电脑,通过数据接收程序给数据加上时间标记,该时间为笔记本电脑的系统时间。笔记本电脑的系统时间同样是通过GPS时钟授时得到。如此,各个传感器的数据便统一到同一个时间系统下。
2.空间同步
在实际使用中,所有的传感器数据都需要统一到同一坐标系(一般为地方坐标系)中。系统中,3台激光扫描仪需要进行坐标系统一,即空间同步。
扫描仪采集的数据是基于扫描面极坐标系中角度与距离信息,通过定义扫描仪坐标系将角度与距离信息解码为坐标信息。扫描仪空间同步工作就是确定扫描仪坐标系与地方坐标系之间的转换参数,将扫描仪采集的点云数据转换到地方坐标系下。由于扫描仪是在行驶中的汽车上进行数据采集的,因此扫描仪坐标系相对于地方坐标系是不断变化的,直接求取两坐标系之间的转换参数不是很方便。本系统定义了车载坐标系,借助于车载坐标系来完成两坐标系之间的参数求解,具体过程如图4所示。
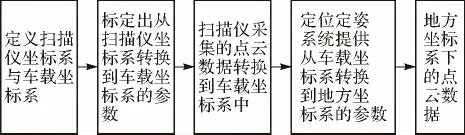
图4 空间同步过程
扫描仪坐标系与车载坐标系之间的转换参数可以通过扫描仪外参数的标定来确定,本系统3台扫描仪坐标系转换到车载坐标系参数见表1,其中,ΔX、ΔY、ΔZ为3个平移参数;α、β、γ为3个旋转参数:分别表示绕X轴、Y轴和Z轴旋转的角度,顺时针旋转为正;尺度参数取1。车载坐标系与地方坐标系的平移参数由GNSS系统提供,旋转参数由IMU提供。

表1 3台扫描仪坐标系转换到车载坐标系的参数
3台扫描仪坐标系与车载坐标系定义如图5所示,其中坐标系的Z轴方向垂直向上。
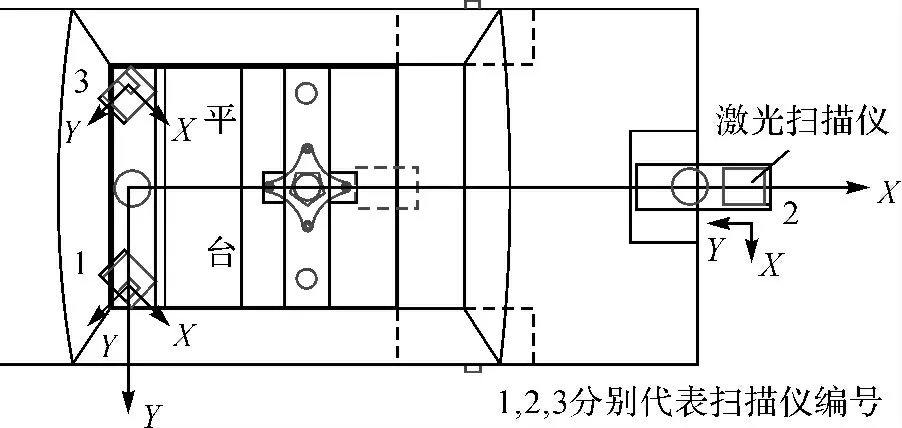
图5 扫描仪坐标系与车载坐标系定义
3.里程计与IMU推算位置
在卫星信号良好的路段,通过GNSS接收机可以很好地解算出激光扫描仪的空间位置,但是当卫星信号失锁时,GNSS接收机无法完成定位解算,此时本系统组合使用里程计和IMU,可以有效地对空间位置信息缺失的路段进行补偿[10]。同时,可以利用有卫星信号的定位解对里程计与IMU推算的位置进行校正。通过试验证明里程计与IMU结合进行位置推算可以达到很好的效果,解决了本系统在GNSS接收机无法进行实时定位时候的定位问题。
四、试验及分析
在移动测量系统搭建完成后,在上海市逸仙高架路进行了路测试验。
逸仙高架路上卫星信号良好,试验过程中只有很少的路段出现了卫星失锁的情况,这些路段利用上文提及的里程计与IMU组合进行位置推算,最终将处理得到的点云数据导入到PointTools软件中并与试验中的行驶轨迹对比,如图6所示。
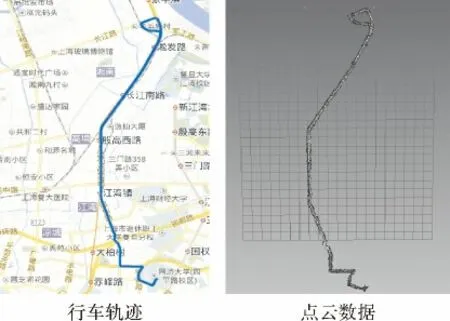
图6 行车轨迹与点云数据对比
通过激光点云回波强度信息,提取到的道路信息得到了非常直观的显示,同时可以轻易地判别出道路的标识标线信息。对试验中的一个高架路匝道和左转车道点云数据进行放大,如图7所示,高架路两边的路灯、直行箭头、速度标识,左转车道禁止掉头、左转标识等道路信息都已被采集。
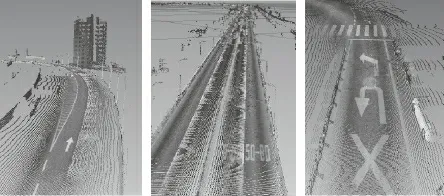
图7 逸仙路高架路匝道点云
但对点云数据进行观察发现,某些地方会出现不属于道路面的一些错误点,这些点可能是扫描仪在采集数据时旁边有汽车经过所致,也可能是道路旁的植被等物体的数据。同时,点云结果中出现了一些没有数据的空缺,这些空缺可能是被扫描的物体反射率过低造成的。
五、结论与展望
本文为解决交通道路数据采集的问题,设计并搭建了一套车载移动测量系统。然后,利用文中提出的关于系统时间同步、空间同步及卫星失锁情况下的定位问题的解决方法成功使车载移动测量系统运转起来。最后,使用该移动测量系统进行了路测试验,获取了点云结果,并对结果进行了分析,得出了其能够满足道路交通数据采集的需求的结论。
同样,该系统还有许多可以改进的地方,如对处理得到的点云数据进行预处理,过滤掉杂点,尤其是旁边汽车。另外,通过设计检校场来对传感器标定的外参数进行校正,使得到的点云数据精度更高。
[1] 邹晓亮.车载测量系统数据处理若干关键技术研究[D].郑州:解放军信息工程大学,2011.
[2] HE G P,CUNNINGHAM D,BOSSLER J.Spatial Data Collection with the GPSVan Mobile Mapping System[J].Proceedings of ISPRSCommission IV Symposium,1944,30(4):107-113.
[3] 周星伶.GPS/INS组合导航系统松,紧耦合性能比较[J].航空电子技术,2007,38(4):1-6.
[4] 高为广,杨元喜,崔先强,等.IMU/GPS组合导航系统自适应Kalman滤波算法[J].武汉大学学报:信息科学版,2006,31(5):466-469.
[5] 徐田来,游文虎,崔平远.基于模糊自适应卡尔曼滤波的INS/GPS组合[J].宇航学报,2005,26(5):571-575.
[6] JACOBSEN K.Combined Bundle Block Adjustment with Attitude Data[C]∥ASPRS Annual Convention.[S.l.]:ASPRS,1999.
[7] YASTIKLI N,JACOBSEN K.Influence of System Calibration on Direct Sensor Orientation[J].Photogrammetric Engineering and Remote Sensing,2005,71(5):629-633.
[8] JUSTIN Luvene Crawford.Multi-Sensor Calibration of an Integrated Mobile Mapping Platform[R].[S.l.]:Undergraduate Honors Thesis of Ohio State University,2012.
[9] 叶泽田,杨勇,赵文吉,等.车载GPS/IMU/LS激光成像系统外方位元素的动态标定[J].测绘学报,2011,40(3):345-350.
[10] 徐恒立.移动测量系统的定位与定姿[D].上海:同济大学,2015.
