面向机器人的多维力/力矩传感器综述*
2015-03-27钟晓玲张晓霞
钟晓玲,张晓霞
(成都理工大学 信息科学与技术学院,四川 成都610059)
0 引 言
目前,多维力/力矩传感器在机器人、航空航天、生物医学等领域得到了广泛应用,特别是在机器人领域。随着机器人的发展进入智能机器人阶段,智能机器人的“触觉”、“力觉”和“听觉”主要通过其配备的传感器得以实现。其中,多维力/力矩传感器作为测量机器人末端操作器和外部环境相互接触或抓取工件时所承受力和力矩的传感器,它为机器人的力控制和运动控制提供了力感信息,从而对完成一些复杂、精细的作业,实现机器人智能化起着重要作用。
1 常见传感器类型
多维力/力矩传感器结构如图1。根据敏感元件的种类,多维力/力矩传感器可分为电阻应变式、压电式、电容式、光学式等几类。
1.1 电阻应变式

图1 常见无耦合型传感器结构框图Fig 1 Structure type of common types of non-coupled sensor
电阻应变式多维力/力矩传感器一般选用金属丝或应变片作为敏元件。在外力的作用下,通过改变金属丝的形状实现其阻值的变化,从而将力/力矩转换为电量输出。该类传感器是目前国内外应用最多、技术最成熟的一种多维力/力矩传感器。按其输出类型又可分为耦合型(间接输出型)和无耦合型(直接输出型)两大类。
1.1.1 耦合型
耦合型传感器的应变桥的输出信号几乎和每个力/力矩分量有关,为此,必须对各路输出信号进行解耦才能得到所需测量的力信号。该类传感器的典型结构有竖梁、横梁、Stewart 平台式等类型。
由美国Draper实验室研制的三竖梁六维力传感器—Waston 腕力传感器[1],是竖梁结构的典型代表,如图2(a)所示。该传感器横向效应好、结构简单、承载能力强,但竖向效应差、维间干扰大、灵敏度较低。因此,学者们对此结构的传感器进行改进,研制了一种四垂直筋结构的六维力传感器[2]。该传感器不仅具有上述优点,而且维间耦合很小,但垂直方向的灵敏度仍较低。由于竖梁结构型的竖向缺陷,使得在以后传感器设计中较少采用竖梁结构。
十字横梁结构是目前耦合型传感器中应用最多的横梁结构类型,该结构最初由美国斯坦福大学人工智能研究所设计[3],其机械结构如图2(b)所示。作用在传感器上的力由水平横梁的弯曲应变反映。该类传感器具有灵敏度高、无径向效应、易于标定等优点,但其竖直方向抗过载能力较差,动态特性难以提高。后来许多学者对此采用有限元法改善弹性体结构和改进电阻应变片的分布位置[4]。如干方建[5]建立十字横梁多维力传感器的三维有限元分析模型,并进行了应力、应变分析,同时对应变片的贴片位置进行了优化设计,使得传感器的测量精度得到了提高。此外,基于十字横梁结构研制一种新结构的多维力/力矩传感器也是一种新的设计方法,如Kim G S 等人[6]设计的六维力/力矩传感器,可有效降低维间干扰误差。中国科学院智能机器人研究所[7]采用十字梁结构的弹性体也研制了一种新型六维腕力传感器;同期,西北工业大学设计了一种用于四足仿生机器人脚部的六维力传感器[8],该传感器具有测量灵敏度高、维间干扰小、弹性体固有频率高等特点。另外,上海交通大学改进常规十字横梁传感器,设计了一种滑移结构平行梁式的六维力传感器[9],其具有维间耦合小、灵敏度高、量程小等特点,该传感器适用于外科手术机器人手部的力觉信息采集。
如前所述,国内外学者针对十字横梁结构已研究了多种多维力/力矩传感器,但这些结构常存在结构复杂、尺寸大、刚度低、灵敏度低、解耦难等问题。而并联机构具有对称性好、结构紧凑等优点,因而自Gaillet A 等人[10]首次提出基于并联机构Stewart 平台的传感器(如图2(c)所示)以来,该类传感器在国际上受到了许多学者的关注。如Dwarakanath T A 等人[11]采用Stewart 平台研制了六维力/力矩传感器,其中弹性体采用复合式结构,该类传感器具有结构紧凑、承载能力强、误差不累积等优点。鉴于已研发的Stewart 传感器的上述优点,后来许多学者主要从结构参数与负荷分配间的关系、结构设计以及预紧力等方面研究了Stewart 传感器。如Jia Z Y 等人[12]采用有限元分析方法阐明负载的分配效力随平台半径的最低有效位增加而增大,且所提出的测量方法可将线性误差和重复性误差控制在1%以内。Yao J T 等人[13]对改进的基于Stewart 平台的六维力传感器进行分析,通过分析关键结构参数的解析关系获得空间各向同性结构。此外,Wang Z J 等人[14]对六维力传感器进行超静定受力分析,并采用线性变换确定预紧力。
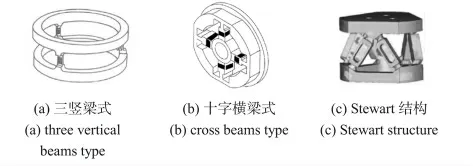
图2 常见耦合型传感器结构类型Fig 2 Structure types of common types of coupled sensor
1.1.2 无耦合型
无耦合型传感器的弹性体无耦合作用,被测量力由传感器的输出和结构常数直接获取。这类传感器的最早代表是美国SIR 公司于1973 年设计的积木式结构[15],如图3(a)所示。该结构由多块不同弹性体组成,不同弹性体检测不同方向的受力。但积木式弹性体的加工精度和装配精度对传感器测量结果的影响很大,这使得它的实用性几乎为零。而无耦合型传感器因具有成本低,标定、维护简单等优点,后来国内外许多学者从改进结构方面对该类传感器的交叉耦合缺陷展开研究,其研究包括十字横梁的几何结构优化[16]、八竖梁结构的贴片和组桥方式优化[17](如图3(b)所示)、解析法优化传感器几何结构[18]等。但第一类优化方法不能保证其整体误差达到最小,而最后一类方法不具有普适性[19]。另外,鉴于无耦合型传感器结构复杂、实用性差等缺点,目前,无耦合型传感器并未得到广泛应用。

图3 常见无耦合型传感器结构类型Fig 3 Structure type of common types of non-coupled sensor
1.2 压电式
压电式传感器是一种电量型传感器,它是智能结构和机器人技术发展中最具发展前途的传感器之一。目前,许多研究者开展了选用压电元件作为敏感元件直接感知被测力的非弹性体式多维力/力矩传感器的研究,有效突破了弹性体式多维力/力矩传感器存在的复杂弹性体结构、高固有频率与高灵敏度等瓶颈[20]。
目前,研究者对压电式多维力/力矩传感器的研究主要表现在以下几个方面:刘巍[21,22]先后采用将石英晶片嵌入Stewart 平台6 条腿中的研究思路,提出了基于Stewart 结构的压电式六维大力传感器。该传感器实现了随机械手手臂半径增加,对大力的分载能力增强的效果,但当手臂半径增大到一定程度时,分载效果不明显,大力测量也变得难以实现。另外,Fabrice F D 等人[23]研制了基于压电(piezoelectric,PZT)结构铁电陶瓷微小力传感器,但该传感器的压电材料不适于大变形,并且仅能测量一个方向的微小力。针对这一问题,Li Y J 等人[24]基于KISTLER 公司的研究思路研究了大量程六维力传感器。但因该研究方案具有针对性,目前未能得到具有普适性的解析数学模型,且很难实现传感器的微型化。为此,刘俊等人[25]提出了八点支撑结构的压电式六维力传感器方案,实现了传感器的微型化,提升了其静动态性能,但由于电极板的影响,其性能受环境湿度的影响很大,稳定性还有待进一步加强。除了上述八点支撑结构的传感器,Li Y J 等人[26]还提出了四点支撑结构的压电式六维力传感器方案,并从菱形和方形方面考虑压电元件的排列顺序,该方案有效降低了干扰误差,且具有良好的频率响应特性。
虽然压电元件是最具有发展前途的敏感元件,但因压电晶片具有堆叠困难、不能长时间作用静态力等缺陷,到目前为止,压电式多维力/力矩传感器的应用还相对较少。
1.3 电容式与光学式
电容式多维力/力矩传感器通过检测电容的变化反映检测压力的变化,这类传感器具有较高的灵敏度和分辨率、压力量程大、结构比较简单、温度稳定性好。因此,部分学者对不同维数的电容式力/力矩传感器进行了研究。Brookhuis R A 等人[27]采用硅材料微加工制成电容式三维力传感器,可实现指尖相互作用力大小的测量,但系统分辨率需进一步改善。另外,在电容式六维力传感器的研究中,Givanazzo G 设计的电容式六维力传感器[28]最具代表性(如图4(a)所示),该传感器的弹性体上装有多组电极片,当力作用于弹性体时,电极片随弹性体移动,使得各维的电容发生与所受力呈正比的变化。后来,被成功开发的还有基于微机电系统(micro-electro-mechanical system,MEMS)的六维力扭矩传感器[29],它包含7 只电容器,因此,系统的灵敏度比较高。另外,这类六维力传感器的标定矩阵由实验数据计算得到,实验表明,该类传感器的分辨率得到了很大改善。此后,对六维电容式传感器,还研制了一种六自由度电容式力扭矩传感器[30],该传感器有更宽的测力范围,灵敏度也较高。但上述所提及的各维电容式力/力矩传感器,由于其无法摆脱抗干扰差和存在寄生电容等问题,因此,该类传感器在实际应用中相对较少。
伴随电容式多维力/力矩传感器产生的还有光学式多维力/力矩传感器,该类传感器较早的代表为日本东京大学机械系研制的光学六维力传感器[31](如图4(b)所示)。这种传感器采用六横梁结构,其中,三个梁装有四分性光学传感器,并在梁的中心位置有三个光源分别射向三个光学传感器,通过光学传感器测量微小变形,从而测出六维力的各个分量,该传感器在磁振成像的力测量中已取得了很好的效果。随后,学者们又研发了一种新的且被广泛应用的基于光纤布拉格光栅的传感器[32],该传感器具有较高的灵敏度和空间分辨率、无滞后、且数据处理速度快、有较强的抗电磁干扰能力。另外,学者们还研制出了利用LED 和四个光电晶体管测量弹性体形变的传感器[33]。在上述所研发的各类光学式传感器中,普遍存在着价格昂贵,体积大,难以集成到复杂机器人结构中等问题。针对这些问题,文献[34]提出了基于有限元建模优化光学式多维力/力矩传感器机械结构的方法,该方法可有效避免上述问题的出现,对接触体的几何重建也十分精确。

图4 电容式和光学式传感器Fig 4 Capacitive and photoelectric sensors
2 结 论
本文介绍了几种主要类型的多维力/力矩传感器及其发展现状。由此可知,目前耦合型电阻应变式多维力/力矩传感器是应用最广泛且技术最为成熟的一类传感器,但由于电阻应变式多维力/力矩传感器在承载能力和机械结构方面的原因,压电式多维力/力矩传感器已成为最具发展潜力的一类传感器。但无论是电阻应变式,还是压电式多维力/力矩传感器,其维间耦合、大量程以及动态测量等将仍是许多学者继续探索的重点。
[1] Watson P C,Drake S H.Pedestal and wrist force sensors for automatic assembly[C]∥Proceedings of the 5 th International Symposium on Industrial Robots,Chicago,USA,1975:501-511.
[2] Kroll E,Weil R.Decoupling load components and improving robot interfacing with an easy-to-use 6-axis wrist force[C]∥The 7th World Congress Theory on Machines and Machanisms,Sevilla,Spain,1987:1155-1158.
[3] Schernman V.Designing of computer manipulator[D].Stanford,California:Stanford University,1969.
[4] Liang Q K,Zhang D,Song Q J,et al.Design and fabrication of a six-dimensional wrist force/torque sensors based on E-type membranes compared to cross beams[J].Measurement,2010,43:1702-1719.
[5] 干方建,刘正士,任传胜,等.一种应变式多维力传感器的优化设计[J].传感器与微系统,2007,26(1):56-59.
[6] Kim G S,Shin H J,Yoon J W.Development of 6-axis force/moment sensor for a humanoid robot’s intelligent foot[J].Sensors and Actuators A:Physical,2007,141(1):276-281.
[7] Wu B Y,Luo J F,Shen F,et al.Optimum design method of multiaxis force sensor integrated in humanoid robot foot system[J].Measurement,2011,44(9):1651-1660.
[8] 高 军,冯华山,刘 桉,等.四足仿生机器人足部六维力传感器设计[J].组合机床与自动化加工技术,2010(2):21-24.
[9] 何小辉,蔡 萍.一种小量程六维力传感器的设计与分析[J].传感器与微系统,2012,31(1):20-25.
[10]Gaillet A,Reboulet C.An isostatic six component force and torque sensors[C]∥Proceedings of the 13th International Symposium on Industrial Robots,Chicago,USA,1983:102-111.
[11]Dwarakanath T A,Bhutani G.Beam type hexapod structure-based six component force-torque sensor[J].Mechatronics,2011,21(8):1279-1287.
[12]Jia Z Y,Sheng L,Liu W.Measurement method of six-axis load sharing based on the stewart platform[J].Measurement,2010,43(3):329-335.
[13]Yao J T,Hou Y L,Chen J,et al.Theoretical analysis and experiment research of a statically indeterminate pre-stressed six-axis force sensor[J].Sensors and Actuators A:Physical,2009,150(1):1-11.
[14]Wang Z J,Yao J T,XuY D,et al.Hyperstatic analysis of a fully pre-stressed six-axis force/torque sensor[J].Mechanism and Machine Theory,2012,57:84-94.
[15]Craig J J.Introduction to robotics mechanics&control[M].New Jersey:USA,Addision Wesley Publishing Company,1986:68-93.
[16]Kim G S.Design of a six-axis wrist force/moment sensor using FEM and its fabrication for an intelligent robot[J].Sensors and Actuators:Physical,2007,133(1):27-34.
[17]姚智慧,张付祥.新型力解耦机器人六维力传感器研究[J].传感技术学报,2002(4):387-391.
[18]Ma J Q,Song A G.Fast estimation of strains for cross-beams sixaxis force/torque sensors by mechanical modeling[J].Sensors,2013,13(5):6669-6686.
[19]Kang M K,Lee S,Kim J H.Shape optimization of a mechanically decoupled six-axis force/torque sensor[J].Sensors and Actuators A:Physical,2014,209:41-51.
[20]李 敏,刘 俊,秦 岚,等.平板式压电六维力传感器静态性能研究[J].机械工程学报,2014,50(6):1-7.
[21]刘 巍,林 盛,贾振远,等.压电式六维大力传感器:中国,200710157931.2[P].2008—03—26.
[22]Liu W,Li Y J,Jia Z Y,et al.Research on parallel load sharing principle of piezoelectric six-dimensional heavy force/torque sensor[J].Mechanical Systems and Signal Processing,2011,25(1):331-343.
[23]Fabrice F D,Stephen A W,Graham E,et al.Characterisation of PZT thin film micro-actuators using a silicon micro-force sensor[J].Sensors and Actuators A:Physical,2007,133(1):35-44.
[24]Li Y J,Sun B Y,Zhang J,et al.A novel parallel piezoelectric sixaxis heavy force/torque sensor[J].Measurement,2009,42(5):730-736.
[25]刘 俊,秦 岚,李 敏,等.平板式压电六维力/力矩传感器的研制[J].光学精密工程,2011,19(7):1569-1579.
[26]Li Y J,Zhang J,Jia Z Y,et al.Reasearch on force-sensing element’s spatial arrangement of piezoelectric six-component force/torque sensor[J].Mechanical Systems and Signal Processing,2009,23(8):2687-2698.
[27]Brookhuis R A,Wiegerink R J,Lammerink T S J,et al.Threeaxial force sensor with capacitive read-out using a differential relaxation oscillator[C]∥2013 IEEE Conf on Sensors,Baltimore,MD,2013:1-4.
[28]Giovinazzo G,Varrone P.Transducer with six degrees of freedom:US,4320392[P].1980—08—28.
[29]Beyeler F,Muntwyler S,Nelson B J.A six-axis MEMS forcetorque sensor with micro-newton and nano-newtonmeter resolution[J].Journal of Microelectromechanical Systems,2009,18(2):433-441.
[30]Brookhuis R A,Elwenspoek M C,Bore M J,et al.Six-axis forcetorque sensor with a large range for biomechanical applications[C]∥2012 IEEE 25th International Conference on MEMS,Paris,France,2014:595-598.
[31]Luo M H.Development of a six-axis force/tractile sensor for robot finger by employing spring beams[C]∥IEEE The 29th Annual Conference,Roanoke,USA,2003:1505-1510.
[32]Heo J S,Chung J H,Lee J J.Tactile sensor arrays using fiber Bragg grating sensors[J].Sensors and Actuators A:Physical,2006,126(2):312-327.
[33]Jara T,Iuliu V,Coral R.A soft touch:Compliant tactile sensors for sensitive manipulation[J/OL].CSAIL Technical Report MITCSAIL-TR-2006-014.[2006—03—01].http:∥hdl.handle.net/1721.1/31220.
[34]Maria G D,Natale C,Pirozzi S.Force/tactile sensor for robotic applications[J].Sensors and Actuators A:Physical,2012,175:60-72.
