自主柔性变形蛇形机器人控制系统设计*
2015-03-27王超杰连晓峰时佳斌
王超杰,苏 中,连晓峰,赵 旭,时佳斌,陈 庚
(1.北京信息科技大学 高动态导航技术北京市重点实验室,北京100101;2.北京工商大学 计算机与信息工程学院,北京100048;3.北京理工大学 自动化学院,北京100084)
0 引 言
在灾难救援任务中,复杂地形与恶劣环境对机器人运动性能提出了严峻挑战,同时也为仿生机器人的研究创造新的发展空间。与传统移动机器人相比,蛇形机器人作为一种特殊仿生机器人在复杂地形环境下具有明显优势:1)躯体重心低,运动方式更稳定;2)依靠躯体摆动摩擦获得前进动力使其具有一定的自动避障能力;3)躯体结构和多种步态使其可通过狭窄空间。总之,蛇形机器人具有较高的运动稳定性和较强的环境适应能力,不仅可以在地震、矿灾等环境中进行灾害搜救工作,也可以应用于军事侦察、空间探索等领域。
现今大多数移动机器人存在控制系统实时性差、越障能力和自主性不够强等缺点,满足不了高性能小型自主移动机器人的需求。本文依据复杂搜救环境的救援需求,设计了以ARM 微处理器STM32 为核心、多传感器融合的蛇形机器人控制系统,实现了机器人的远程监控与运动控制、多传感器环境信息采集等功能[1~4]。
1 控制系统
1.1 控制系统总体结构
为了满足废墟灾难环境中的控制需求,设计了蛇形机器人控制系统[5],如图1 所示。控制系统上层是监控系统,通过Zig Bee 无线模块给主控系统发送控制蛇步态的指令,如蜿蜒、蠕动、翻滚、分体等。主控系统的音视频信息和惯导、温度、湿度、压力、有害气体等传感器信息分别通过1.2 G无线收发模块和Zig Bee 模块传输给监控系统显示。主控模块通过Zig Bee 无线模块与从控系统进行通信,以控制其实现相关的步态。
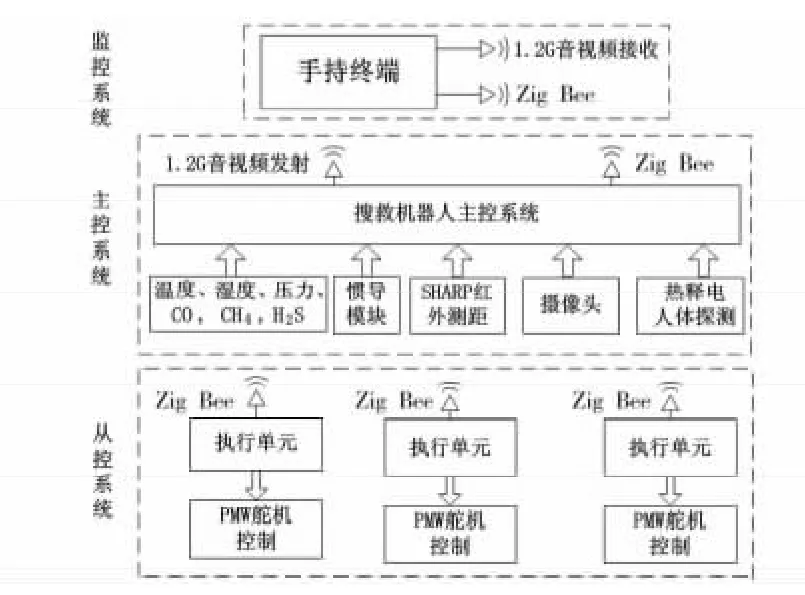
图1 机器人控制系统结构图Fig 1 Structure diagram of robot control system
1.1.1 主控系统
主控系统主要由ARM 核微处理器STM32、无线通信模块以及传感器组成。主控系统通过无线模块接收监控系统的控制指令,并根据指令决定搜救机器人的运动步态、运动方向以及到达目标的位置;传感器收集灾难环境中音视频、温度、湿度、有毒气体以及红外测距信息,微处理器根据测距信息选择合适的运动步态,并将控制指令通过无线模块发送给从控系统去执行。各传感器与主控单元的连线图如图2 所示。
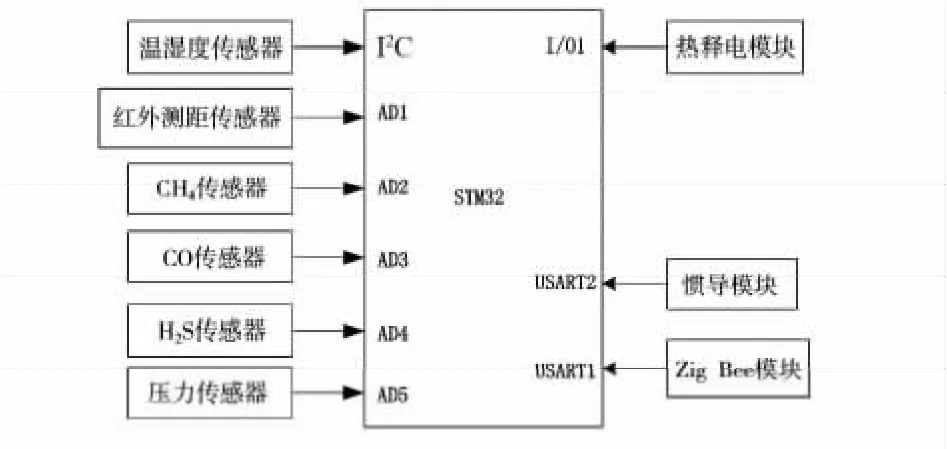
图2 各传感器与主控单元的连接图ig 2 Connection diagram of each sensor and master control unit
1.1.2 从控系统
从控系统使用了和主控制器一样的高速ARM 处理器,可同时控制18 路PWM 舵机。从控系统通过Zig Bee 无线模块从主控制系统获得控制指令,通过PWM 信号控制关节机构运动。从控系统结构图如图3 所示。
1.2 步态控制
图4 所示为Serpenoid 曲线,用来规划蛇形机器人的运动轨迹,并确定搜救机器人的驱动函数。
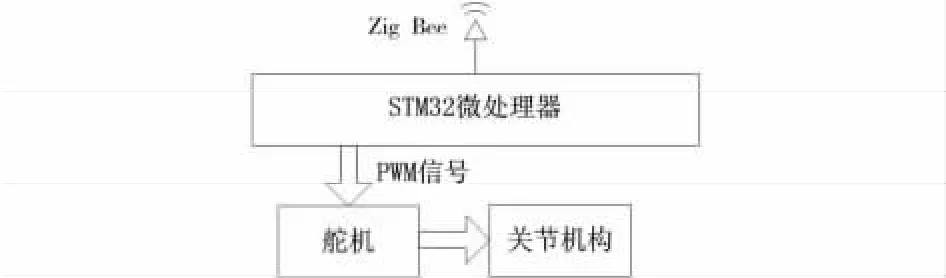
图3 从控系统结构图Fig 3 Structure diagram of slave control system
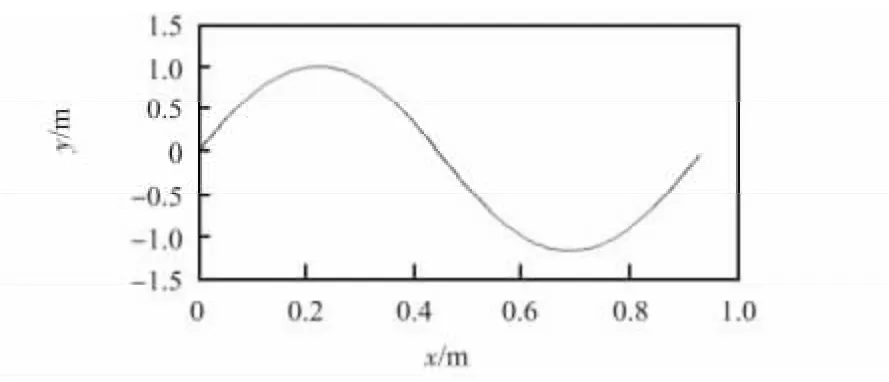
图4 Serpenoid 曲线Fig 4 Serpenoid curve
Serpenoid 曲线在一个周期内的曲率方程可以表示为

式中 α 为搜救机器人初始弯角;k 为传播波的个数;L 为搜救机器人总长;s 为搜救机器人尾部沿搜救曲线轴线方向的虚位移。
根据式(1)可知,曲率ρ 是以弧长s 为变量的函数,当传播的波数一定时,主要受波形的初始弯角所决定。设搜救机器人的脊柱由n 个躯干单元组成,每个躯干单元的长度为L/n,对曲线的曲率进行积分可以得到曲线相对横轴的角度。对公式(1)在相邻2 个单元内进行求导,得到相邻2 个躯干单元之间的相对转角θ 为
由式(2)可以看出,躯干单元的相对转角θ 的变化过程具有正弦函数的特点。当躯干单元的个数和传播的波数一定时,运动曲线的幅度取决于α,并且相邻相对转角相差一个相位。通过改变各个关节之间相对转角来使蛇体达到相应的运动步态,从而实现蛇体运动。
2 实验平台
2.1 蛇形机器人简介
本实验所采用的搜救机器人结构图如图5 所示,该机器人具有如下几个特点:1)采用3D 打印而成,既缩短了加工周期又节约了成本;2)通过ADAMS 软件仿真,进行了机械结构设计,直线长度为2 m,具有6 个正交关节和1 个分体机构,腿部具有变形机构,可以进行站立、卧倒、蜿蜒、蠕动、分体、翻滚等步态;3)机器人采用6 V,4 500 mAh 的电池供电,确保机器人能够连续运动0.5 h 以上。
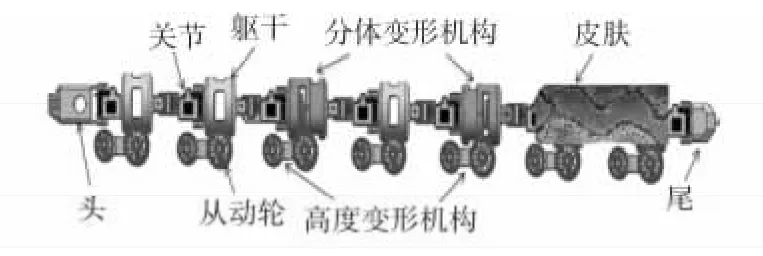
图5 蛇形机器人结构图Fig 5 Structure diagram of snake-like robot
2.2 平台搭建
按照前文所述,搭建了柔性变形蛇形机器人控制系统的整套硬件电路。硬件选型与参数指标如表1 所示。
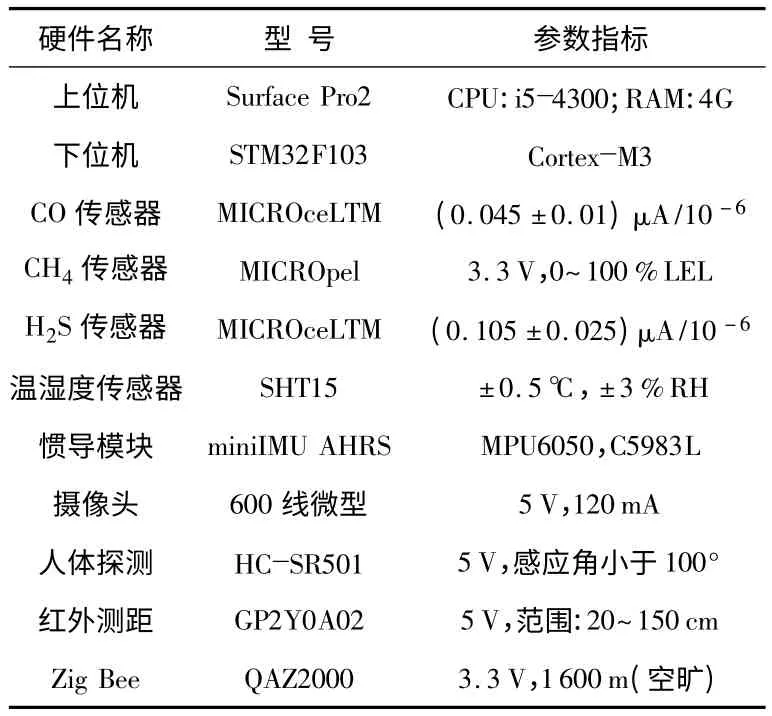
表1 硬件选型与参数表Tab 1 Hardware type selection and parameter table
3 实验结果
3.1 通信实验
图6 为蛇形机器人上位机监控界面,上位机通过远程监控搜救机器人自主移动、翻越障碍物、爬坡等实验,通过无线模块实时传输机器人所处环境的各种传感器信息,并能综合各种环境信息通过无线模块控制机器人运动。实验验证了蛇形机器人控制系统可实现多信息的实时准确无线通信,能够满足复杂搜救环境的通信需求。
3.2 移动性能实验
经过多次实验,不断地调试分别实现了自主柔性变形蛇形机器人蜿蜒、蠕动、分体、翻滚等平面和立体运动步态[6],运动平稳,曲线平滑,蜿蜒运动速度可达0.5m/s。通过穿越狭小空间、翻越障碍物、爬坡等试验,验证了蛇形机器人在不同的环境中,具有良好的多步态运动稳定性和自主移动性能。图7 所示为蛇形机器人在模拟灾难场景中的各种运动步态[7~9]。
4 结束语
本文针对自主柔性变形蛇形机器人控制系统平台进行了设计,此平台具有很好的可扩展性,实现了柔性蛇形机器人的多种运动步态和远程机器人运动控制及机器人所处环境信息的采集。通过实验验证了上位机和下位机无线通信的实时性与准确性,以及蛇形机器人在灾难废墟环境中良好的运动稳定性和自主移动性能,为灾后废墟救援工作提供有效保障。
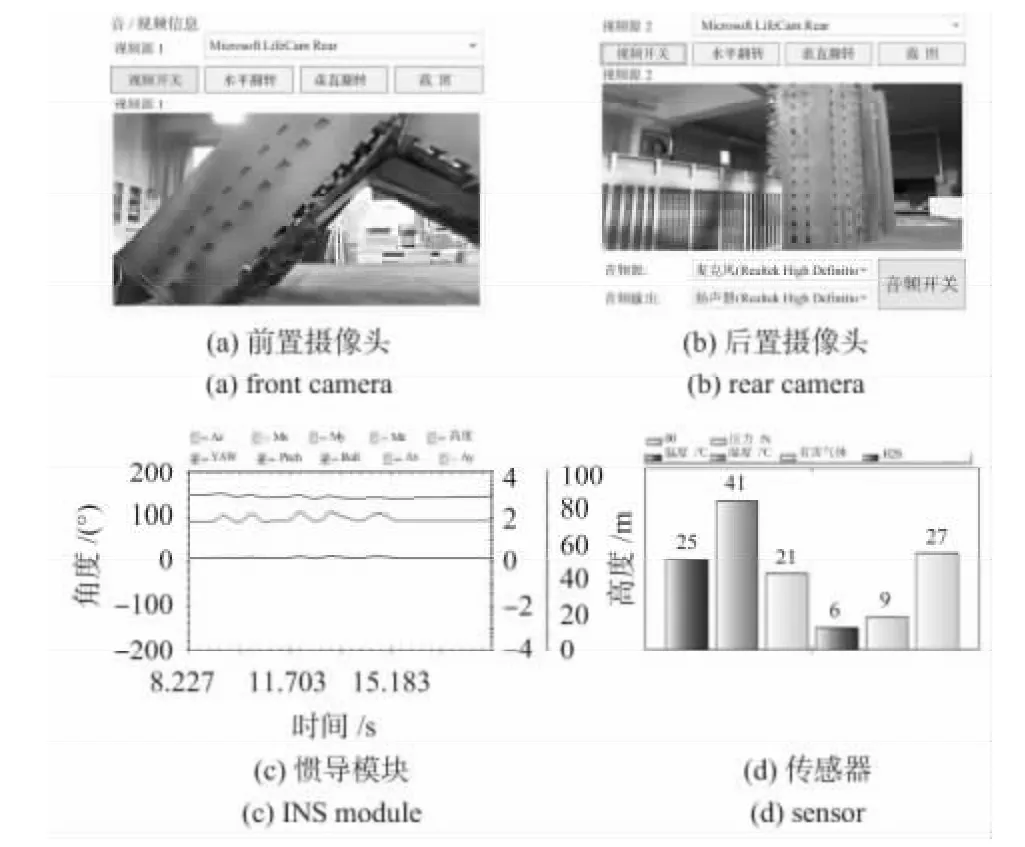
图6 上位机监控界面Fig 6 Upper PC monitoring interface

图7 模拟灾难场景中蛇形机器人运动步态Fig 7 Snake-like robot motion gait in simulated disaster scene
[1] 张小飞,张延恒,孙汉旭,等.可跳跃式两轮机器人的设计与动力学分析[J].机器人,2014,36(3):355-361.
[2] 陈剑斌,田联房,王孝洪.基于ARM 的自主移动机器人控制系统设计[J].机械设计与制造,2011(6):160-162.
[3] 罗 洋,李奇敏,温皓宇.轮腿式机器人控制系统及姿态算法设计与实验[J].计算机工程与设计,2014(5):1612-1618.
[4] 王智锋,马书根,李 斌,等.基于能量的蛇形机器人蜿蜒运动控制方法的仿真与实验研究[J].自动化学报,2011(5):604-614.
[5] 郁树梅,马书根,李 斌,等.蛇形机器人步态产生及步态分析[J].机器人,2011(3):371-378.
[6] 张 策,赵国存,张国宏,等.地震废墟搜救机器人控制系统开发与应用[J].控制工程,2011(S):76-79.
[7] Yamada H,Takaoka S,Hirose S.A snake-like robot for real-world inspection applications(the design and control of a practical active cord mechanism)[J].Advanced Robotics,2013,27(1):47-60.
[8] Crespi A,Karakasiliotis K,Guignard A,et al.Salaman-dra Robotica II:An amphibious robot to study salamander-like swimming and walking gaits[J].IEEE Transactions on Robotics,2013,29(2):308-320.
[9] Chen W,Ren G,Zhang J,et al.Smooth transition between different gaits of a hexapod robot via a central pattern generators algorithm[J].Journal of Intelligent and Robotic System,2012,67:255-270.
