探空湿度传感器空间飞行姿态和加热模型研究*
2015-03-26张颖超
许 超,张颖超,2,孙 宁
(1.南京信息工程大学 信息与控制学院,江苏 南京210044;2.南京信息工程大学 气象灾害预报预警与评估协同创新中心,江苏 南京210044)
0 引 言
当前数值气候预测模型强烈依靠于海平面到高空32 km的气候条件,但由于高空中复杂的光学过程和动力学过程造成了各测量元器件的非线性误差[1],这就需要对大气遥感中测得数据的精确性提供足够的保证。
高空大气处于低温、低湿、低压的状态,这就产生了两个问题:1)空气中的水一部分是以冰晶的状态存在,当湿度传感器经过时,冰晶就会附着在湿度传感器表面,水汽很难在湿敏薄膜中渗透,影响了测量精度;2)太阳辐射会使湿度传感器温度上升,而温度对湿度的测量会产生一定的影响,故湿度测量会有一定的误差。为了解决上述问题,Dai Ching-Liang[2]设计了一种最高可加热到80 ℃的湿度传感器,可满足低温下湿度测量,但由于加热周期较长,不能满足湿度测量要求。刘清惓等人[3]提出了在流体动力学上的仿真,给出了烘干周期和传感器间距,但其简化了模型、没考虑探空仪上升过程中的飞行姿态。
为去除冰晶等对湿度传感器的影响,Vaisala 首先提出了双加热湿度传感器的方法,湿度传感器内部集成了湿敏电容器和电阻器,湿敏电容器用于测量湿度,电阻器用于加热。湿度传感器通过焊盘安装在支架上,支架通过薄型PCB 与PCB 板相连。两只湿度传感器A,B 分别交替处于烘干阶段和测量湿度阶段(测湿)。当湿度传感器B 处于测湿阶段时,湿度传感器A 处于烘干阶段,待将附在湿度传感器A 表面冰晶烘干,并冷却到一定的温度范围后,湿度传感器A 再进入测湿阶段,此时湿度传感器B 进入烘干阶段,如此交替工作,就能通过升温的方式烘干附在湿度传感器表面的冰晶。
计算流体动力学(CFD)方法可以有效地模拟高空环境中气压、风速、温度和空气流动等各因素。基于此本文采用CFD 方法,建立双加热湿度传感器的数值模型,模拟从地面上升到32 km 高空,考虑上升过程中旋转的飞行姿态和横风的干扰,给出双加热湿度传感器理想飞行姿态和烘干周期。
1 数值计算模型
由于支架、薄型PCB 的导热性能差、反射能力强,仿真时可以忽略其影响。而PCB 外采用泡沫包装有较好的保温性能,也可以忽略其传热效应。故为简化模型,只采用并列放置的两只湿度传感器作为仿真模型。
探空仪在上升过程中的飞行姿态主要通过俯仰角、滚转角、偏航角来定义,如图1。俯仰角是支架轴线与XOZ 面的夹角,滚转角是薄型PCB 平面与YOZ 平面的夹角,偏航角是支架轴线与YOZ 面的夹角。在上升过程中PCB 平面保持竖直方向,传感器、支架及薄型PCB 和PCB 保持一定的夹角且认为其不发生侧滚和偏航,故滚转角为90°,偏航角为0°,俯仰角通过仿真来调整。

图1 飞行姿态定义示意图Fig 1 Definition diagram of flight attitude
1.1 双加热湿度传感器模型与网格
本文湿度传感器的大小为4.3 mm×2.86 mm×0.3 mm,为了使空气充分的发展,空气域采用80 mm×60 mm×120 mm的流域。考虑到空气对流的复杂性且双加热湿度传感器与空气充分接触,定义湿度传感器是旋转上升的。2 只湿度传感器间距分别为0.5,1.5,2.5,3,3.5 mm,俯仰角分别为35°,40°,45°,50°,滚转角为90°,偏航角为0°。
文中通过ICEM CFD 软件,采用结构化网格(O-Block)的方法,选定模型有两个进口一个出口,网格如图2。内部固体块为双加热湿度传感器,左侧为流场入口,前侧为次流入口,右侧为出口,其余定义为壁面。
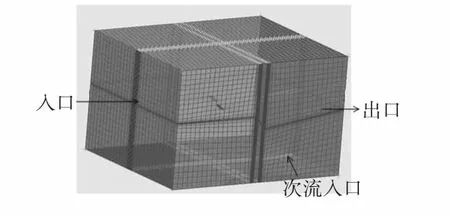
图2 模型网格Fig 2 Grid of model
1.2 边界条件和求解设置
网格入口为竖直风的入口,次流入口为横风的入口,入口采用风速为6 m/s 的速度入口,在对流层内次流入口风速为1.2 m/s,平流层次流入口风速为10 m/s,出口采用压力出口,壁面定义为无滑移壁面。由于空气流速小于0.3 个马赫数,定义为不可压缩流体,雷诺数最大为67.6,故设为层流流动[4]。流体计算使用Fluent 软件,使用三维定常稳态的压力基求解器,湍流模型选择Laminar,压力速度耦合采用Coupled 算法,仿真过程有能量的传递需要启用能量方程,动量和能量方程的离散格式先采用一阶迎风模式,待其快速收敛后改为二阶迎风模式,最终完成计算。
2 空间飞行姿态分析
2.1 湿度传感器间距的分析
为了使湿度传感器(传感器)不受冰晶污染,在高空中需要对传感器加热去除污染,如果间距过小,其加热的温度场会影响另外一只传感器的湿度测量。而在高空32 km 处空气稀薄散热性最差,故在32 km 的温度场满足要求即可,仿真如图3 所示。
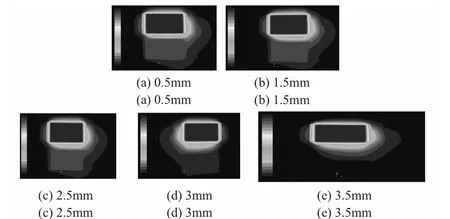
图3 间距仿真图Fig 3 Similation diagram of spacing
图4 为在传感器俯仰角为30°条件下,间距的仿真图。通过仿真得0.074 W 的源项可以达到288 K 的温度。可以看出在间距为0.5,1.5,2.5,3 mm 时,由于自然对流的存在,一只传感器加热时,另一只传感器所处环境温度有所提高。而间距为3.5 mm 时,对一只传感器加热时另一只传感器温度仍与环境温度保持一致,测量结果较为准确。所以,只有两只传感器间距大于3.5 mm 时才会互不影响,考虑到制作成本和支架应尽可能的小,间距选择为3.5 ~6 mm。
2.2 双加热湿度传感器飞行姿态分析
为模拟旋转上升的效果加入了横风的作用,同时与间距的仿真结果相结合,最终选定间距为3.5 mm,海平面气候条件,俯仰角为图4 所示作为研究对象。因摩擦阻力为切应力的面积分,传感器与空气充分的接触,摩擦力也必然最大,故用模型的壁面剪切应力(剪切应力)作为参考变量[5]。
由图4(a)可得剪切应力为0.375 Pa,图4(b)的剪切应力为0.432 Pa,图4(c)的剪切应力为0.454 Pa,图4(d)传感器表面剪切应力变化剧烈,此时湿度测量误差较大,故选择俯仰角为45°作为传感器的最优上升姿态角。
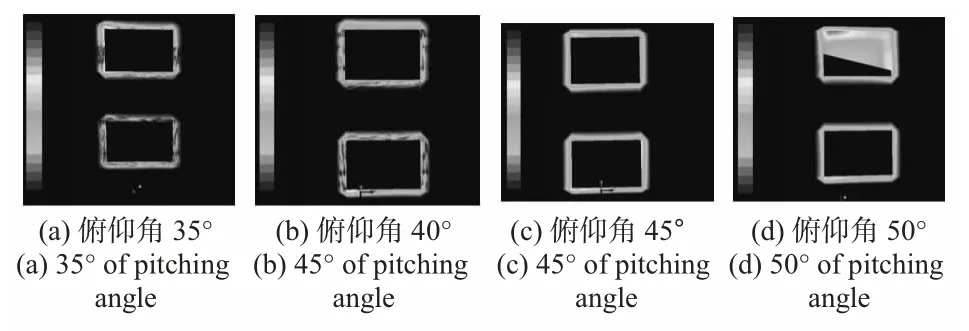
图4 夹角仿真图Fig 4 Simulation diagram of included angle
3 测量周期研究
随着传感器的上升,空气密度也逐渐变的稀薄。在加热功率相同的情况下,如果加热时间都一样,在低温环境下加热温度必然达不到去除冰晶的范围,在高温环境下必然使传感器的温度过高。而传感器表面温度相同时,空气密度小时降到可测量温度的时间就长,使测量湿度周期变长,密度大时就短。针对上述问题就需要合理地设计加热功率和周期问题。
3.1 加热时间和冷却时间
经计算可知0.37 W 的加热功率即可将传感器加热到288 K,故分别采用0.37,0.4,0.43,0.53 W 对加热时间进行设计,0 ~3 km 环境温度相对较高在此阶段不加热。经Fluent 计算得到的加热时间如图5,从图可以看出:加热时间总体上呈现两边小中间大的趋势,在加热功率为0.53 W 时,4 km处的加热时间为0.44 s;13 km 处加热时间为2.31 s,达到最大;32 km 处加热时间为1.29 s,且随加热功率的减小加热时间随之增大。
传感器的降温是通过自然对流实现的,Fluent 中设置成对流换热模式,在误差允许的范围内将温度降幅分别限制在超出环境温度8,10,12 ℃,得出的降温时间曲线如图6。图6 表明:在0 ~3 km 段内传感器温度与环境保持一致降温时间为0 s;4 ~26 km 内随着海拔高度的上升降温时间也逐渐上升。当降温幅度采用超环境温度8 ℃时,4 km处降温时间为9.1 s;26 km 处达到最大为96.5 s,之后,开始下降到32 km 处到达66.9 s,且其他温度均有相同的趋势。
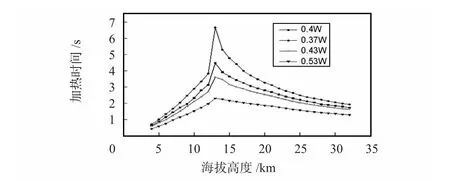
图5 加热时间Fig 5 Heating time
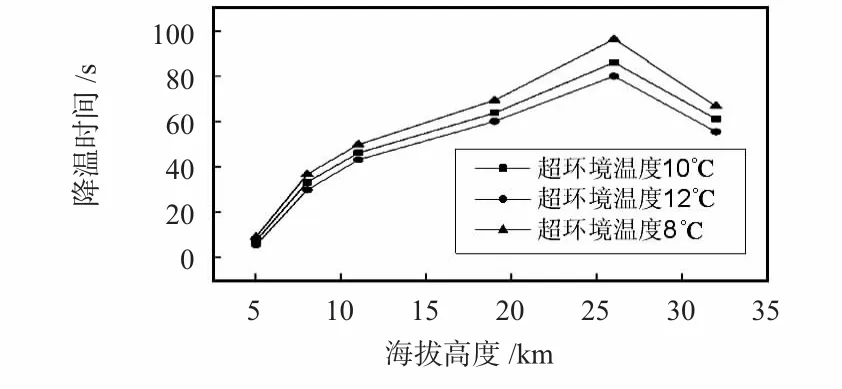
图6 降温时间Fig 6 Cooling time
3.2 测量周期
测量周期定义为加热时间和降温时间之和。在满足要求下,选择最大的加热功率0.53 W,得传感器表面温度为超出环境温度(以下简称超环境温度)8,10,12 ℃的时间,如图7。
当超环境温度为8 ℃时,4 km 处的测量周期为9.54 s;26 km 处达到最大为98.22 s;之后开始下降,在32 km 处为68.19 s,由数据知在26 km 处测量周期较大不能满足测量要求。当超环境温度为12 ℃时,4 km 处时测量周期为5.94 s,26 km 处为82s,32 km 处为56.7 s。故本文提出一种在0~3 km不加热的模式,在4 ~32 km 高度采用加热功率为0.53 W,降温幅度为超环境温度12 ℃的加热模式。
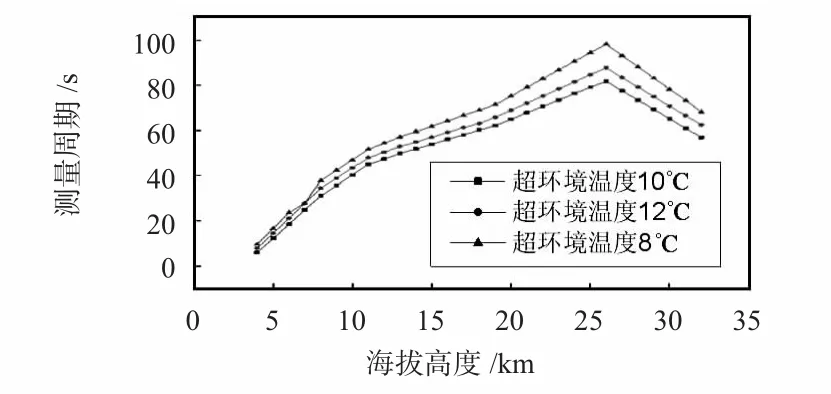
图7 测量周期Fig 7 Measurement cycle
4 太阳辐射的影响
太阳辐射照射到传感器表面会使传感器的温度上升,在加热时间的仿真过程中忽略了太阳辐射[6]的影响,下面通过Fluent 得出太阳辐射对其升温的影响。由图8 知,太阳辐射的影响为类指数变化形式,在0 km 处辐射温度为0.2 ℃,32 km 处为1.14 ℃。而在4 ~32 km 的加热温度为18 ~71 ℃,太阳辐射升温占0.97%~1.9%。加热本身允许有一定的温度误差,而太阳辐射所占温度比例少,故对加热时间影响较小,故忽略太阳辐射影响。

图8 太阳辐射对传感器温度的影响Fig 8 Influence of solar radiation on sensor temperature
5 结 论
1)入口风速为6 m/s,次流入口风速为10 m/s,0.074 W的加热功率条件下,对一只传感器加热所产生的温度场不影响另一只传感器的最优间距为3.5 ~6 mm;
2)传感器俯仰角为45°时壁面剪切应力最大,故传感器上升姿态俯仰角优选的角度为43°~48°;
3)通过对测量周期的分析,采用0 ~3 km 不加热的模式,在4 ~32 km 高度采用加热功率为0.53 W,降温幅度为超出环境温度12 ℃的加热模式;
4)传感器的加热温度变化范围为18 ~71 ℃,辐射加热温度为0.2 ~1.14 ℃,最大占1.9%,对加热时间影响较小。
[1] 王晓宾,孙树计,陈 春,等.青岛上空中层大气密度和温度的激光雷达探测[J].空间科学学报,2011,31(6):778-783.
[2] Dai Ching-Liang.A capacitive humidity sensor integrated with micro heater and ring oscillator circuit fabricated by COMS-MEMS technique[J].Sensors and Actuators B,2007,122:375-380.
[3] 刘清惓,杨 杰,杨容康,等.双加热湿度传感器的CFD 分析与加热策略设计[J].传感技术学报,2012,25(8):1039-1044.
[4] 徐 枫,肖仪清,李 波,等.龙卷风风场特性的CFD 数值模拟[J].空气动力学报,2013,31(3):350-356.
[5] 李 剑,王永生,杨琼方.船舶粘性流场加速求解策略研究[J].武汉理工大学学报:自然科学版,2013,37(3):634-634.
[6] James K Luers.Temperture corrections for the VIZ and Vaisala radiosonde[J].Journal of Applied Meteorology,1995,34(6):1241-1253.
