单片集成四元阵列式MEMS 矢量水听器的研究*
2015-03-26简泽明张国军刘梦然张文栋
简泽明,陈 尚,张国军,刘梦然,许 娇,张文栋
(1.中北大学 仪器科学与动态测试教育部重点实验室,山西 太原030051;2.中北大学 电子测试技术重点实验室,山西 太原030051;3.中国运载火箭技术研究院研究发展中心,北京100076)
0 引 言
目前,很多国家都意识到在未来战争中是否能取得制海权的控制至关重要。在海战中,声呐是海上作战个体(各种舰、艇)的五官,所有的水下战场侦察都要以声呐为媒体,缺之不可[1~7]。水声换能器作为声呐系统的重要组成部分,其可靠性十分重要。
为了提高水听器的可靠性,本文采用由多个水听器敏感微结构构成的阵列,并采用MEMS 技术实现单芯片传感阵列一次集成。采用该技术成本低且加工制作方便,尤其适合批量化生产。单片集成阵列化不但可以大幅度降低水听器的制造成本,而且可以使得水听器的一致性更好,满足小型化设计要求。
1 结构设计
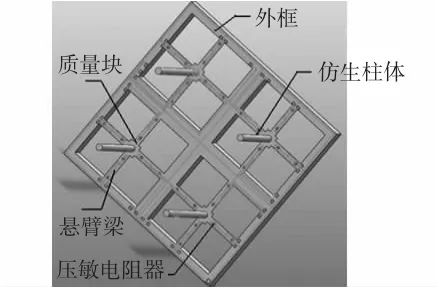
图1 敏感单元微结构阵列Fig 1 Microstructure array of sensitive unit
在单个结构水听器[8~10]的基础之上,本文设计了2×2单片集成四元阵列式MEMS 矢量水听器,以保证其中一个水听器敏感微结构失效损坏或工作不正常时,水听器仍能正常工作。水听器敏感微结构如图1 所示。其中,敏感微结构的几何尺寸为12 μm×120 μm×1 200 μm(梁厚×梁宽×梁长)。4个单元悬臂梁上X,Y 两路的惠斯通电桥均设计为并联形式。其中,16 只电阻器连接成一个X 轴的惠斯通电桥,另16 只电阻器连接成一个Y 轴的惠斯通电桥。梁上的电阻器布局示意图如图2 所示。图3 为四单元X 悬臂梁上电阻器连接成的惠斯通电桥,VoutAx为X 方向输出电压。当有沿X 正方向的声波信号时,X 悬臂梁上的16 只电阻器的阻值由于悬臂梁的变形就会产生不同的变化。这样X 悬臂梁上电阻的变化就被检测出来。阵列敏感微结构X,Y 轴对称,当Y 方向声信号作用时,同理可以检测Y 方向信号。
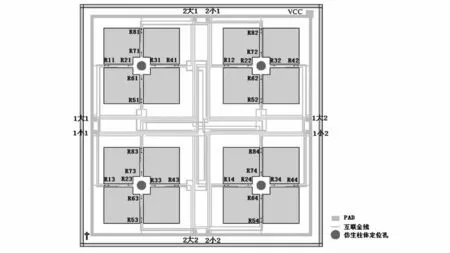
图2 阵列敏感微结构电阻器布置与连线示意图Fig 2 Diagram of resistance distribution and connection on array sensitive microstructure
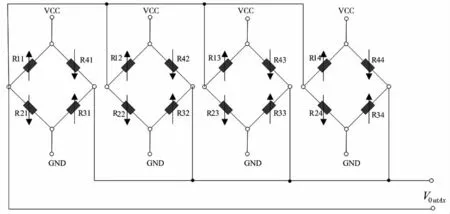
图3 X 悬臂梁上惠斯通电桥连接示意图Fig 3 Wheatstone bridge connection diagram on X cantilever beam
从理论上分析,通过设计此惠斯通电桥的连接方式,可以保证当阵列敏感微结构其中某一单元失效或损坏时,阵列敏感微结构仍有输出,且输出值不变,即不影响敏感微结构的整体性能,从而提高了MEMS 矢量水听器的可靠性。
2 敏感微结构仿真分析
采用ANSYS 对阵列结构进行仿真分析,仿真主要包括静力分析、模态分析、谐响应分析[11]。
2.1 静力分析
在阵列敏感微结构模型的边框与背面施加全约束,沿仿生柱体Y 方向施加1 Pa 载荷,观察其位移和应力输出。位移云图如4 所示,可以看出仿生柱体位移最大,位移为0.071 3 μm,在梁的根部和边框位移较小,基本接近于零。以Y 悬臂梁上表面中心为路径,通过路径分析,获得Y 悬臂梁上表面x,y,z 方向上各点的应力曲线,如图5 所示。由应力曲线图可知,Y 悬臂梁上y 方向最大应力为44 600 Pa,远小于硅的屈服强度7 000 MPa[12]。
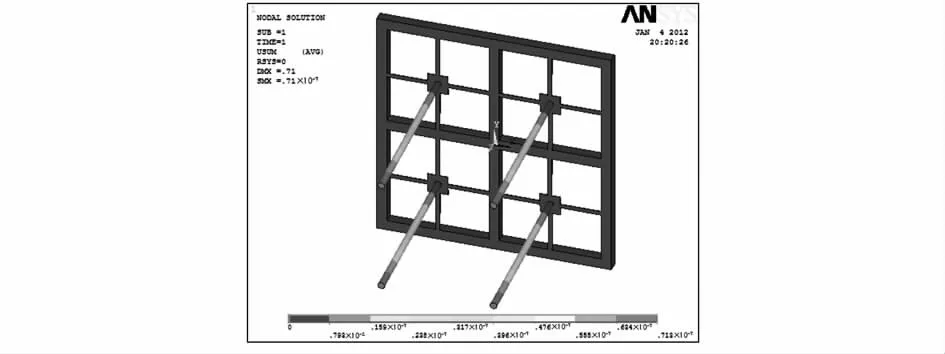
图4 位移云图Fig 4 Displacement diagram
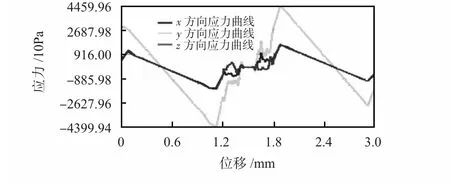
图5 Y 悬臂梁上x,y,z 方向应力曲线Fig 5 Stress curve on Y cantilever beam in x,y,z direction
同时,从图5 可知梁上的应力基本上是线性分布且梁两端上的应力最大,但是在梁的根部有跳动。因此,在布置电阻器时应该避开区域,梁上的力敏电阻器应布置在距根部两端80 μm 的中心位置处[13~15]。
2.2 模态分析
进行模态分析可以使结构设计避免共振或以特定频率进行振动,关系到器件可以使用的频率范围。模态分析的结果如表1 所示。阵列敏感微结构第一阶模态的振型如图6所示。
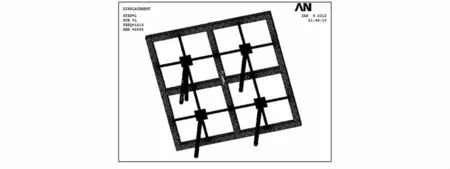
图6 1 阶模态Fig 6 First order modal
单片集成阵列敏感微结构的仿生柱体长度一致,所以,从理论上说,阵列敏感微结构四个单元仿生柱体的共振频率应该相同、振型一致。然而,仿真存在的误差性导致各单元的共振频率相差1 Hz 左右。从表2 可以看出:前8 阶频率为四单元阵列敏感微结构工作模态的频率,工作模态以外的其他模态均为干扰运动。前8 阶频率和9~10 阶的工作频率差距很大,因此,可以有效地降低交叉耦合。
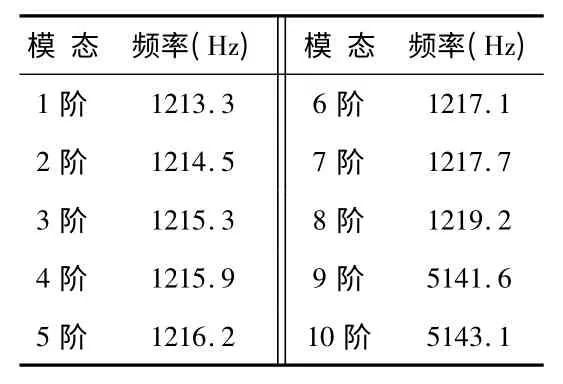
表1 模态分析结果Tab 1 Modal analysis results
2.3 谐响应分析
在阵列敏感微结构设计时,可通过谐响应分析预知敏感微结构的固有频率,克服因共振和其他的受迫振动给阵列敏感微结构带来的有害结果。图7 和图8 为阵列式MEMS 矢量水听器敏感微结构的谐响应分析结果,由图8和图9 中仿真结果可以看出:仿生柱体的谐振频率在1 200 Hz,对应的最大纵向应力为900×104Pa,最大位移为0.95 μm。
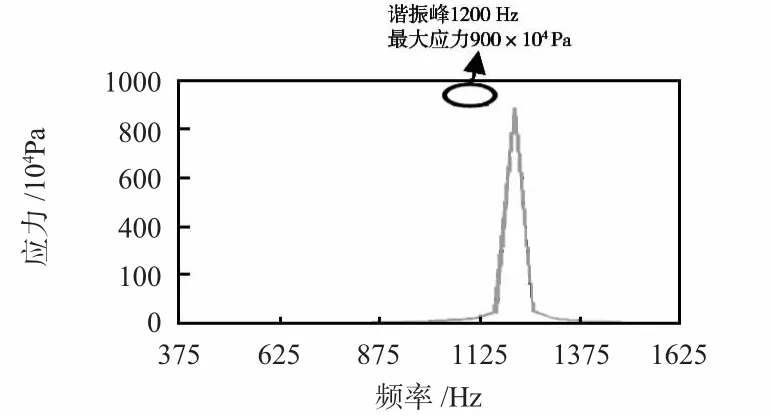
图7 应力随频率变化曲线Fig 7 Curve of stress change with frequency
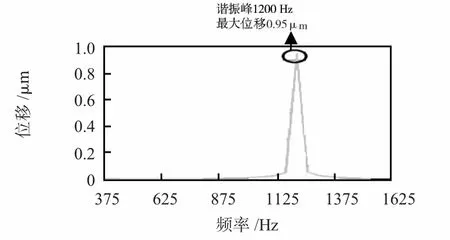
图8 位移随频率变化曲线Fig 8 Curve of displacement change with frequency
3 敏感微结构加工工艺设计
3.1 版图的设计
本文中阵列硅微敏感单元的版图一共分为9 层,分别为压阻版P-、欧姆接触版P+、合金硅化物版、背腔腐蚀版、刻蚀介质膜版、引线孔版、金属线互联版、仿生柱体定位孔版、正面刻穿版。每层版上都定义了对准标记,以便于各层版的对准。阵列硅微敏感单元版图的整体结构如图9 所示。
3.2 工艺流程的设计
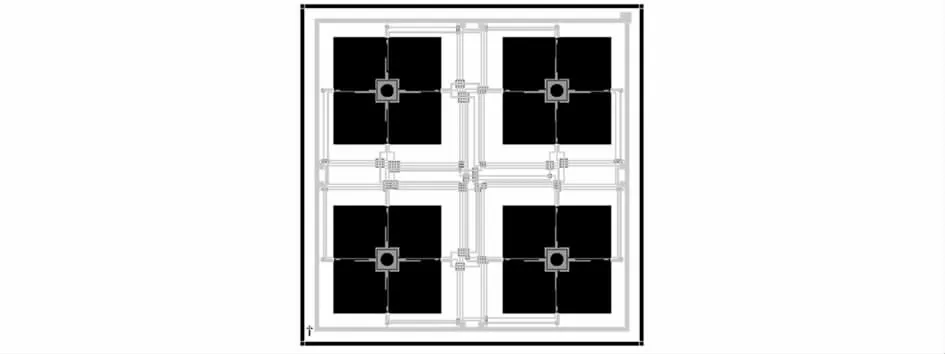
图9 阵列硅微敏感单元版图的整体结构Fig 9 Overall structure of layout array Si micro sensitive unit
阵列硅微敏感单元是在电子科技集团公司第五十五研究所微米纳米研发部完成加工,结合该研发部的加工条件,对工艺流程进行了初步的设计,主要采用SOI 材料微加工技术完成悬空结构的加工。主要工艺流程如图10。
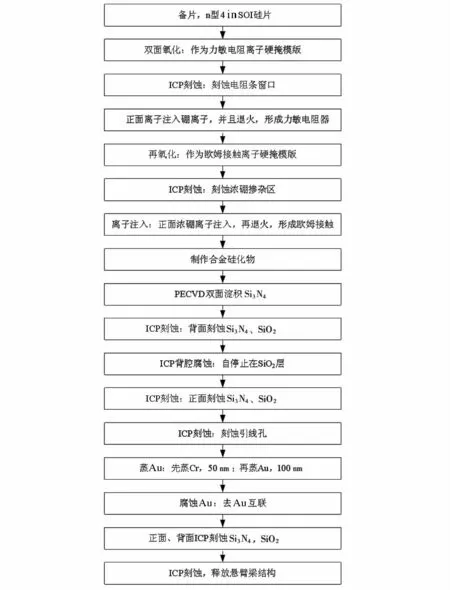
图10 工艺流程图Fig 10 Process flow chart
4 测 试
为验证阵列式MEMS 矢量水听器的可行性,对声学封装后的阵列式MEMS 矢量水听器进行水声校准测试。图11所示为阵列式MEMS 矢量水听器的实物图。
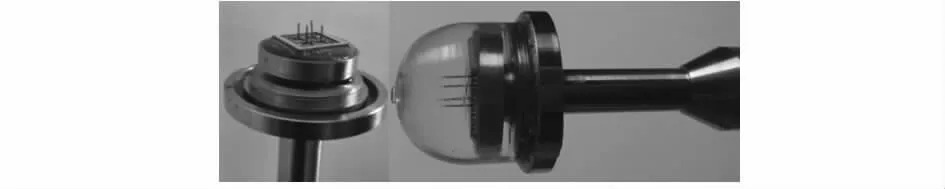
图11 阵列式MEMS 矢量水听器的实物图Fig 11 Physical map of array MEMS vector hydrophone
4.1 灵敏度校准测试
阵列式MEMS 矢量水听器灵敏度的校准测试采用比较校准法,校准装置图如图12 所示。在测试过程中,将待测水听器和标准水听器处于水下同一深度。
待校准的水听器灵敏度Mx为[16]

其中,M0为标准水听器的自由场电压灵敏度;ex,e0分别为待校准水听器和标准水听的开路输出电压;d 为待校准水听器(或标准水听器)的放置深度。

图12 校准装置示意图Fig 12 Diagram of calibration device
灵敏度校准过程中,将待校准水听器的最大灵敏度输出方向与驻波桶内的声波传播方向平行。在四种情况下的X 方向频响曲线如图13 所示。从图13 中可以看出:该阵列式MEMS 矢量水听器在频带范围20~1 000 Hz 内,灵敏度达到-179 dB(0 dB=1V/μPa);频响曲线良好,波动不超过±3 dB;并且当损坏其中某一个或两个或三个芯片单元后,微结构的频响曲线与损坏之前的频响曲线基本一致。
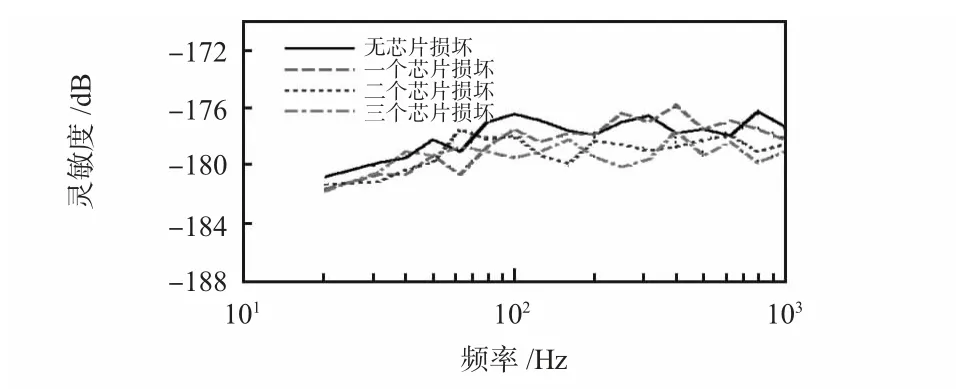
图13 阵列式MEMS 矢量水听器X 路的频响曲线Fig 13 X-direction frequency response curve of array MEMS vector hydrophone
4.2 指向性测试
在驻波桶环境中对水听器进行指向性测试。将阵列式MEMS 矢量水听器安装在机械回转杆上,当发射声场的频率为某一恒定值保持不变时,通过回旋装置转动阵列式MEMS 矢量水听器,记录矢量水听器在各个方向上的输出电压值。
归一化所记录的数据

其中,eθ,emax分别为矢量水听器在任意方向、最大方向时接收到的输出电压值。将归一化的数据绘制成极坐标图,即为矢量水听器在某一频率下的指向性图。
图14 为阵列式MEMS 矢量水听器X 方向在500 Hz 和上述在四种情况下时的指向性图。测试结果表明:该水听器指向性曲线较平滑,凹点深度值-25 dB,并且当损坏其中某一个或两个或三个芯片单元后,微结构的指向性与损坏之前的指向性基本一致。
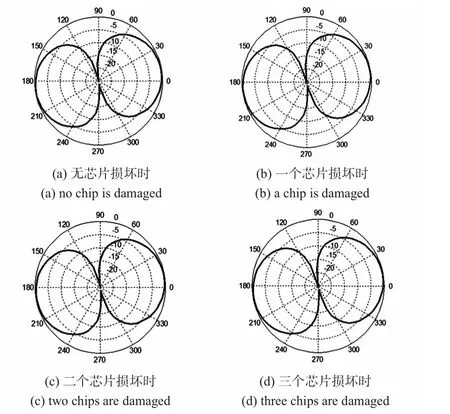
图14 X 方向指向性图(频率500 Hz)Fig 14 Directionality in X direction
5 结 论
本文对单片集成阵列式MEMS 矢量水听器进行了研究。该阵列式MEMS 矢量水听器敏感微结构四个单元的惠斯通电桥采用并联连接,测试结果表明:当阵列敏感微结构其中某一个或两个或三个单元工作失效时,微结构的频响曲线和指向性与损坏之前的频响曲线和指向性基本一致,即不影响敏感微结构的整体性能。因此,此阵列敏感微结构可使MEMS 矢量水听器的可靠性得到提高,并且阵列式矢量水听器的灵敏度达到-179 dB(0 dB=1V/μPa)。该水听器的指向性曲线较平滑,具有良好的“8”字余弦指向性。因此,该阵列式矢量水听器对于提高水听器可靠性的研究有非常重要的意义,为MEMS 矢量水听器的工程化应用奠定了基础。
[1] 陈丽洁.微型矢量水听器研究[D].哈尔滨:哈尔滨工程大学,2006.
[2] 刘光辉.微电子机械系统的发展及其在军事电子装备中的应用[D].哈尔滨:信息产业部电子第49 研究所,2001:4-10.
[3] 陈洪娟,杨士莪,王智元,等.中频小型矢量水听器设计研究[J].应用声学,2006,25(6):328-333.
[4] 管 宇.一种低频三维MEMS 矢量水听器的研制[D].哈尔滨:哈尔滨工程大学,2010.
[5] 贾志富.三维同振球型矢量水听器的特性及其结构设计[J].应用声学,2001,20(4):18-19.
[6] 杨德森,洪连进.矢量水听器原理及应用引论[M].北京:科学出版社,2009:2-5.
[7] 杨松涛.深水矢量水听器的研制[D].哈尔滨:哈尔滨工程大学,2010.
[8] 李 振,张国军,薛晨阳,等.MEMS 仿生矢量水听器封装结构的设计与研究[J].传感技术学报,2013,26(1):25-30.
[9] 许 姣,张国军,石归雄,等.纤毛式矢量水听器新型封装结构的研究[J].传感技术学报,2011,24(4):519-520.
[10]许 姣,李 俊,张国军,等.一种新型MEMS 矢量水听器的设计[J].压电与声光,2012,34(1):90-91.
[11]周长城,胡仁喜,熊文波.ANSYS 11.0 基础与典型范例[M].北京:电子工业出版社,2007:45-53.
[12]陈 尚.硅微仿生矢量水声传感器研究[D].太原:中北大学,2008.
[13]张国军,陈 尚,薛晨阳,等.纤毛式MEMS 矢量水声传感器的仿生组装[J].纳米技术与精密工程,2009,7(3):224-226.
[14]谢 斌,薛晨阳.硅微仿生矢量水声传感器研制[J].传感技术学报,2006,19(5):2300-2303.
[15]Ranjith Amarasinghe,Dzung Viet Dao,Toshiyuki Toriyama,et al.Development of miniaturized 6-axis accelerometer utilizing piezoresistive sensing elements[J].Sensors and Actuators A,2006,134(2):310-320.
[16]费 腾.矢量水听器校准装置[J].声学技术,2005(增刊):289-291.
