挖掘机工作装置运动学仿真
2015-03-24颜景润宋明星朱春华马轶群马立勇
颜景润 宋明星 朱春华 马轶群 马立勇
(河北建筑工程学院,河北 张家口 075000)
挖掘机工作装置运动学仿真
颜景润 宋明星 朱春华 马轶群 马立勇
(河北建筑工程学院,河北 张家口 075000)
以日立EX200LC-5型反铲液压挖掘机为对象,采用proe建立液压挖掘机的工作装置虚拟模型,采用Adams软件进行运动学仿真,模拟挖掘机正常工作状态.运用运动学仿真结果计算最大挖掘半径、最大挖掘深度、最大挖掘高度与已有的20 t日立挖掘机参数进行比对,两者结果吻合较好.对挖掘机工作装置进行优化,使工作装置最大挖掘半径变大,其工作更有效率.
Adams;运动学仿真;优化
1 引 言
1.1 挖掘机工作装置工作原理
反铲液压挖掘机的工作装置由动臂、斗杆、铲斗、连杆机构组成,各部件之间全部铰接,通过动臂缸的上升下降,斗杆缸的伸出和回收,铲斗缸的挖土和卸土来实现挖掘过程中的各种动作,如图1.通过日立EX200LC-5型反铲液压挖掘机为对象研究反铲挖掘机的工作装置.
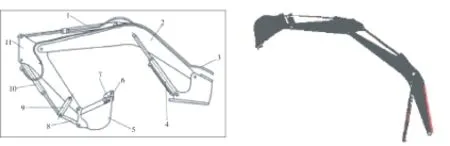
图1 挖掘机最常用的反铲工作装置 图2 挖掘机工作装置虚拟模型
1.2 主要参数
整机主要技术参数见表1.
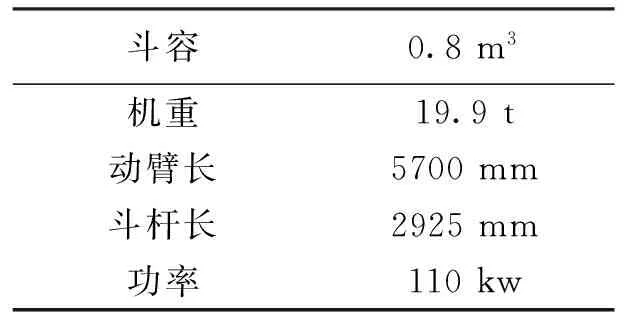
表1 主要参数
2 挖掘机工作装置运动学仿真
2.1 挖掘机工作装置虚拟建模及装配
本论文采用三维CAD/CAM系统软件proe对挖掘机工作装置进行三维虚拟建模,分别建立动臂模型、斗杆模型、铲斗模型以及动臂油缸、铲斗油缸、斗杆油缸和铲斗与斗杆的摇杆连杆机构三维模型,再根据虚拟装配原理,最终装配成反铲液压挖掘机工作装置的三维模型.并对挖掘机工作做装置进行干涉检查并检验模型的正确性.如图2
2.2 ADAMS运动学仿真
2.2.1 在ADAMS中将proe建好的模型导入.
在ADAMS中将Proe建立的好模型导入,导入ADAMS后,只提供各构件的初始位置,在ADAMS中,还要进行布尔运算,添加约束,施加载荷等.Adams导入后的模型图如图3所示.
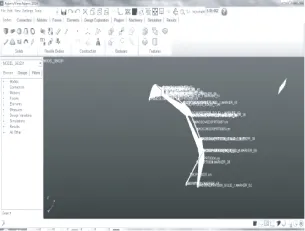
图3 导入Adams工作装置模型图
2.2.2 布尔操作
刚导入的模型,对输入的模型进行布尔运算,舍去与运动无关的构件,将运动相同构件合并.从而得到挖掘机工作装置由固定座、连杆、摇杆、铲斗、斗杆、动臂、铲斗液压缸、斗杆液压缸、动臂液压缸12个活动构件.然后给构件添加质量,惯性矩,以及质心,maker标记点为运动仿真提供基础.
2.2.3 创建约束
为了定义物体之间的相对运动关系,需要给各构件添加约束关系,即用约束副将工作装置连接为一个整体.见表2.
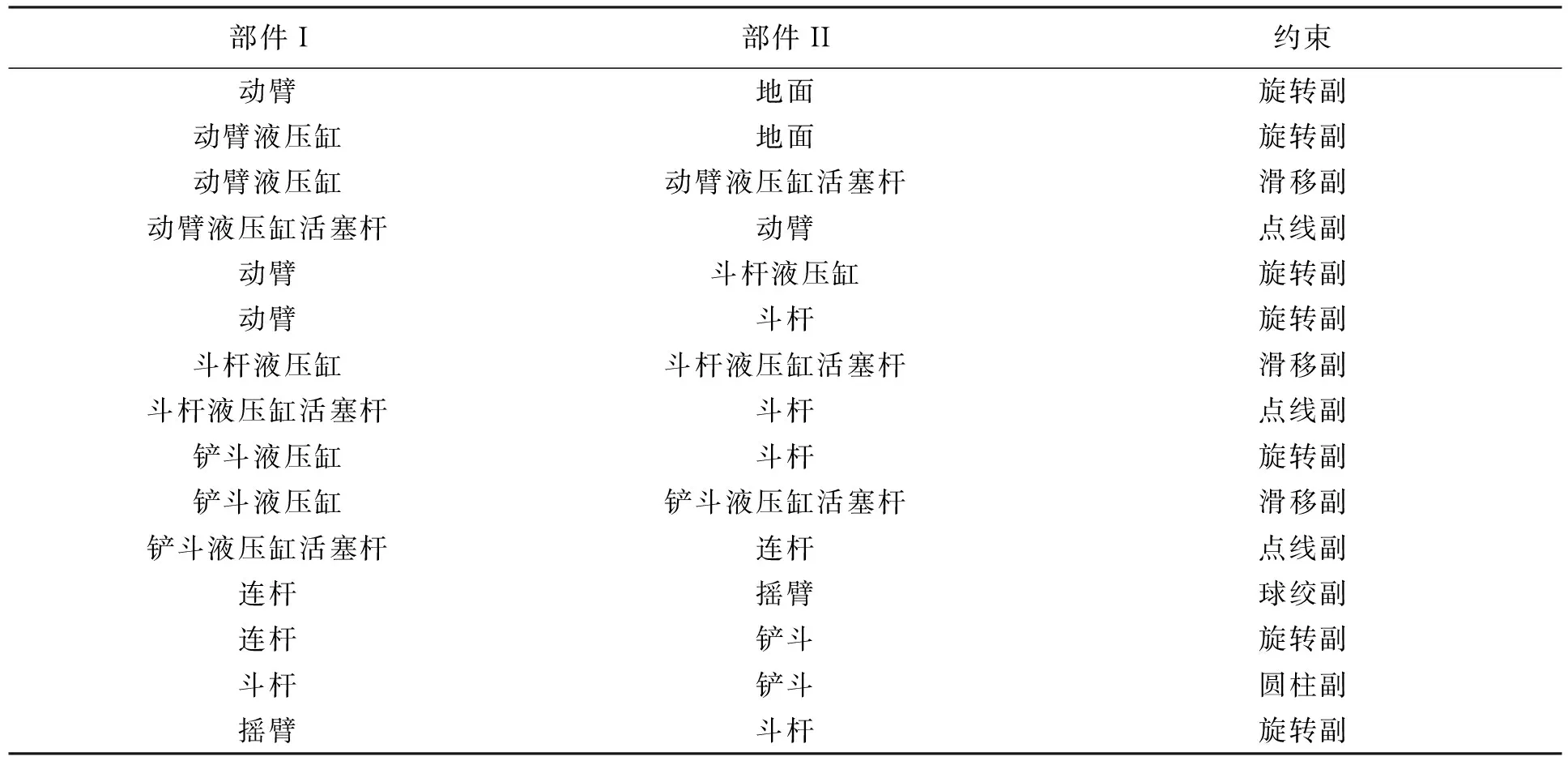
表2 各部件约束关系
通过各个约束关系,计算模型的自由度为:
F=11×6-1×4-7×5-1×3-3×5-3×2=3,
对动臂油缸、斗杆油缸、铲斗油缸上的移动副施加3个驱动,通过液压缸的伸缩来实现挖掘过程中的各种动作.
2.2.4 工作装置的运动学分析
挖掘机在正常挖掘时为节省工作时间,提高工作效率,采用复合动作挖掘.在Adams虚拟样机运动学仿真中,采用复合动作挖掘要求参数较多,不便于分析各个参数.因此使用让油缸按一定顺序依次动作的方式更加方便,从而检验挖掘机的挖掘范围,测定挖掘机的主要作业尺寸如最大挖掘深度、最大垂直挖掘深度、最小回转半径、最大挖掘高度、最大挖掘半径、最大卸载高度等参数.
例如:最大挖掘半径r1
由于本文设置的初始位置不在原点处,所以必须得到相对位置才可以得到的铲斗斗尖位移曲线然后通过间接计算从而得到最大挖掘半径,如图4所示.
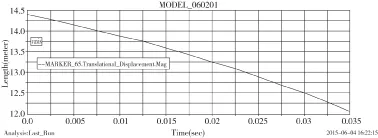
图4 齿尖位移曲线图
从上图可以看出斗齿尖位移为2.3,齿尖距离动臂下绞点位移为8,所以最大挖掘半径r1=10.3,上文已标出最大挖掘半径为9.875,两者近似相等所以验证正确.

参数出厂值仿真值两者误差%最大挖掘半径9.87510.30.96最大挖掘深度6.620m6.50.98最大挖掘高度109.7670.98
仿真值与日立EX200LC-5型反铲液压挖掘机出厂值的结果比较
3 挖掘机工作装置的优化设计
对挖掘机工作装置进行优化设计,本论文采用调整绞点位置,使挖掘机最大挖掘半径变大,来改善挖掘机的工作性能.
本文对挖掘机工作装置的斗杆与动臂下绞点位置进行调整,运用Adams仿真测量动臂下绞点到铲斗斗尖距离,得出距离为7.6;斗齿齿尖的位移曲线图如图5,得出其位移是3,所以最大挖掘半径为10.6,与之前计算的最大挖掘半径是10.3<10.6.可得出绞点优化后,挖掘机工作装置最大挖掘半径变大,其工作更有效率.
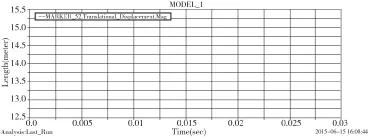
图5 铲斗斗尖位移曲线
4 结 论
1)利用proe对挖掘机工作装置建立三维虚拟建模,Adams对其运动学仿真,并且将仿真结果与出厂值比较,两者参数相近,从而得到运动学仿真能很好的验证产品的性能,节省设计时间;
2)通过优化设计绞点位置,提高了挖掘最大半径,所建立的挖掘机工作装置可作为设计研发的有力参照.
The Simulation of Kinematics of excavator Working device
YANJing-run,SONGMing-xing,ZHUChun-hua,MAYi-qun,MALi-yong
(Hebei university of architecture,Zhangjiakou 075000,China)
With Hitachi EX200LC-5 backhoe hydraulic excavator as an object,using proe to set up the virtual model of hydraulic excavator working device,adopting the software of Adams to procceed the kinematics simulation and simulate the excavator working state.The biggest mining radius s,the maximum mining depth,mining height get by calculating according to the simulation result and compare with the existing 20 t Hitachi excavator parameters,the results are consistent greatly.Optimized the excavator working device,enlarge the biggest mining radius.The device will be more efficient.
Adams;kinematics simulation;optimization
2015-05-24
开发挖掘机工作装置和液压系统的数字化平台,河北建筑工程学院青年基金项目(QN201401)
颜景润(1981-),女,硕士研究生,讲师.
TH 12
A
