基于Kasami编码的多波束多焦点发射聚焦方法
2015-03-23鲁东陈宝伟李海森周天
鲁东,陈宝伟,李海森,周天
(1.哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;2.哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001)
波束宽度是浅水多波束测深系统最重要技术指标之一,由航迹方向开角和垂直航迹方向开角共同确定,并直接影响纵向角度分辨力和横向角度分辨力。常规系统中远场角度分辨力由基阵长度和阵元数决定,而在近场时受近场效应影响,横向角度分辨力常需近场源定位方法来保证[1],但近场纵向角度分辨力则由于发射未聚焦而严重下降。
发射聚焦方法早已有之[2-5],但由于常规浅水多波束测深系统中发射信号是单频脉冲信号,通过信号在发射阵元上的时延只能在一个固定焦点上聚焦,但多波束测深系统在单次测量时海底各目标点离基阵距离并不相同,尤其在超宽覆盖多波束测深系统[6]中覆盖角度越宽,海底各点离基阵的距离差别越大。在医学超声领域,为精细测量近场目标,采用逐点发射聚焦方法,本方法有着较高的分辨力,但仅限于静止目标,而多波束测量时,测量船和海底相对运动,限制了本方法的应用。因此同时多焦点聚焦方法成为解决本问题的必然选择,周泽民[7]采用合适的子阵划分可以产生多个超声聚焦点,但这是以牺牲单个焦点的角度分辨力为代价的。而随着近些年扩频编码信号在水声领域的广为应用[8],尤其是有着优越自相关特性和互相关特性的Kasami编码信号的应用[9],使得将Kasami编码信号应用到本文解决同时多焦点聚焦成为可能。基于此,本文提出了一种基于Kasami编码的浅水多波束近场多焦点发射聚焦方法。
本文首先介绍了近场发射聚焦的基本原理,并引入有着优越自相关特性和互相关特性的Kasami编码信号,提出了基于Kasami编码信号的近场多焦点发射聚焦方法的发射和接收系统原理框图,并推导了相应的表达式,给出了Kasami编码信号的周期自相关函数(periodic autocorrelation function,PACF)和周期互相关函数(periodic cross-correlation function,PCCF),并以2 m典型水深平海底为目标给出了发射未聚焦、单焦点发射聚焦和多焦点发射聚焦的目标回波强度图,定量比较分析了3种条件下的发射波束宽度和积分旁瓣比(ISLR)。最后通过仿真和水池试验,验证了所提方法的有效性。
1 多焦点发射聚焦原理
1.1 单焦点聚焦原理
在如图1的浅水多波束测深系统的近场发射模型中,设阵元数为2M的等距线阵,各阵元指向性相同且为全指向性发射,发射信号波长为λ,阵元间距为d,目标A离发射阵中心距离为r。常规系统中,由于采用远场平面波近似,各阵元发射相同信号s(t),目标A到阵元m(-M+1≤m≤M)与阵元0之间距离差为

则目标A处接收到的信号为

在远场条件下,r远大于md,距离差ΔDm可以忽略,在A点收到的信号为各阵元同相叠加的结果,能量达到最大,能形成有效的多波束测深条带。而在近场条件下r与md可比拟,ΔDm影响随距离变小而变大,使各阵元信号不能同相叠加,能量削弱,角度分辨力变差,所形成的测深条带质量下降。为使近场时能在A点达到同相叠加的目的,需采用发射聚焦方法,各阵元根据离发射阵的距离计算ΔDm,并据此对各发射阵元信号进行相位补偿或时延补偿,使所有阵元信号在焦点处能同相叠加,即可提高焦点处能量聚焦的效果,从而提高了纵向角度分辨力。

图1 发射阵列模型Fig.1 Transmission array model
1.2 Kasami编码特性
由于单焦点聚焦仅能提高焦点附近的分辨力,而远离焦点的分辨力无法保证,为解决这一矛盾,需要同时在近场范围内形成多个聚焦点,提高整个近场范围内的纵向分辨力,但如果仅采用多个单频脉冲信号聚焦到不同焦点,回波信号中各焦点信号相互干扰,无法区分各焦点信号,无法准确分辨目标。为了抑制焦点间信号的干扰,需要选用具有良好相关特性的信号簇,即各焦点信号之间互相关和自相关旁瓣值要足够的小。而扩频编码在这方面有着较为优越的性能,但常规扩频编码中m序列和Gold码的相关性能并非最优,而由前人研究表明Kasami编码[10]具有更优越的相关特性,其最大自、互相关旁瓣值均接近于Welch[11]理论下限。因此,本文优选Kasami编码应用到浅水多波束近场多焦点发射聚焦中,以降低各个焦点间信号的相互干扰。
由Kasami的性质可知,其PACF和PCCF分别为

式中:n为Kasami序列的阶数;N为序列的长度,其值为2n-1。由式(3)、(4)可知,阶数越高,码越长,其相关特性就越好。而在多波束测深应用中PACF旁瓣值越小,目标距离分辨力越好,PCCF越小,各焦点间信号的干扰越小。
1.3 多焦点发射聚焦
基于Kasami编码的近场同时多焦点发射聚焦方法,可在单次发射时形成多个聚焦点,提高近场纵向分辨力,其发射聚焦原理框图如图2。

图2 多焦点发射聚焦方法Fig.2 Multi-focus transmission focusing method
为产生L个焦点r1,r2,…,rl的信号,首先,通过Kasami序列生成器产生L组优选的Kasami编码c1(t),c2(t),…,cl(t),然后进行码元移位键控,可得c1,j(t),c2,j(t),...,cl,j(t),通过PSK对每组序列分别进行调制,可以得到调制信号的形式为

式中:A为发射信号的幅度;φ为载波的初始相位; c1,j(t),c2,j(t),…,cl,j(t)是码长为N;码片持续时间为Tc的Kasami码;而每组编码持续时间为T,则有T=NTc。将调制后的信号经过延时发射聚焦模块产生不同时延发射信号,得到不同序列对应的发射基元的发射信号sl,j(t+τlm)。其中τlm=ΔDm/c为第l组码在m阵元上的时延。
其中第l组码通过上述时延可聚焦到焦点rl上。为了同时多焦点聚焦,将L组对应阵元的信号累加可得单个发射阵元的发射信号:
为分析方便,在此先以焦点r1为目标进行分析。发射信号通过水声信道,并由焦点r1处被测目标反射后回到接收阵元。设第m发射阵元发射信号经过被测目标后再返回的传播时延为τ'1m,到达接收机的幅度衰减系数为η,则基阵中心阵元接收信号可表示为

由于目标点处在焦点r1处,则由c1(t)聚焦所产生的时延在此处正好同相叠加,幅度增强达到最大。而其他组编码信号,由于未聚焦到该点,在此焦点处于散焦状态,信号不能同相叠加,幅度衰减严重。因此接收的混合信号中由c1(t)编码产生的信号幅度最大。
1.4 多焦点接收聚焦
通过多焦点发射聚焦,各个编码信号可在不同焦点形成聚焦点,对于海底这样的多目标对象来说,其回波信号包含了不同时间、不同编码的混合信号,接收时需按不同焦点作用范围加以分离。利用编码信号的特点,可用本地编码信号对各个焦点的信号对应卷积提取对应编码的目标信息,具体原理框图如图3。
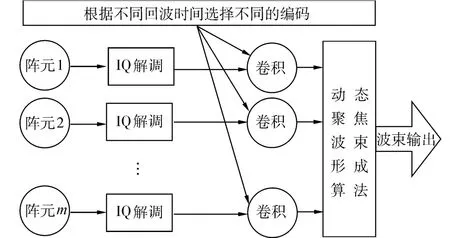
图3 多焦点接收动态聚焦方法Fig.3 Multi-focus reception dynamic focusing method
首先用本地载波对多个阵元输入信号分别进行IQ解调,可得解析信号z(t)=I(t)+jQ(t)。然后由本地产生的焦点1对应的Kasami编码经过码元移位键控可以得到c1,p(t),其中p是码元移位信息,且1≤p≤N。将所得序列与解析信号卷积并取模可分离出第1个焦点的目标信息,其输出为

式中:i是常量,p是变量,当p=i时,c1,p(t)= c1,i(t-τ0),其中编码相乘可以用相关函数形式表示:

结合式(4),当Kasami编码信号越长,其互相关的影响就越小,将互相关项忽略,同时由于目标处在焦点区域τ1m=τ'1m,则可使式(8)进一步简化:

当然前述分析仅以焦点r1为目标来分析,由于所设置焦点从时间上是顺序的,所以在接收时需根据不同回波时间选择不同焦点的编码来进行卷积,从而可以分析其他焦点r2,r3,…,rl的聚焦情况。
2 仿真与分析
2.1 未聚焦和单焦点聚焦仿真
在多波束测深仿真研究中,为方便起见,常以平海底为模型进行研究,目标离基阵的距离不一样,导致近场效应的影响不一样,离基阵距离越近,受近场效应影响越大。设置仿真条件,令发射阵元数M= 56,发射信号频率180 kHz,阵元间距d=5.95 mm,本文以典型2 m深平海底为目标。按照上述条件在FIELD II中设置发射基阵和目标参数,以未做延时的相同单频脉冲信号激励每个发射阵元,在距离水平距离-10~10 m,船行方向角度从-10°~10°范围的目标接收信号强度分布如图4,在正下方2 m深的地方,可以看出距离较远时,还能保持较好的分辨力,但随着距离逐渐变小能量聚集越来越不集中,发射波束宽度变大,纵向角度分辨力下降。
以同样的基阵参数和目标参数为仿真条件,并依据时延计算公式,计算2 m焦点的时延,并按时延对每个通道的单频脉冲信号进行时延,分别激励相应的发射阵元,可得到单焦点聚焦的回波强度图如图5,由图5可以看出,除2 m聚焦点处可以很好的聚焦,分辨力高,其余目标点均不能较好聚焦,纵向角度分辨力较差,不适合近场高精度测量。

图4 未聚焦的目标回波强度图Fig.4 The diagram of unfocused target echo intensity

图5 2 m单焦点聚焦的目标回波强度图Fig.5 The diagram of 2 m single-focal target echo intensity
2.2 Kasami编码特性仿真
Kasami编码信号越长相关性能越好,但在多波束测深系统中由于发射信号时常常不能接收信号,导致测量盲区。本文结合带宽和测量盲区限制,选定Kasami码的码长为63,则由Kasami序列生成器,生成一簇码,并从中选出4组码作为各焦点的聚焦信号。如图6所示。

图6 Kasami编码的PACF和PCCFFig.6 PACF and PCCF of Kasami code
任选其中一组码与自身做循环自相关,可得该码的PACF如图6(a),由图可以看出Kasami编码具有良好的自相关特性。同时选择其中一组码和其他任意一组编码做循环互相关,可得该码的PCCF如图6(b),由此可看出Kasami编码具有良好的互相关特性。基于此,将Kasami编码引入到同时多焦点发射聚焦方法中,可降低各焦点间信号之间的相互影响。
2.3 多焦点聚焦仿真
为验证同时多焦点发射聚焦方法的性能,以同样的基阵参数和目标参数为仿真条件,分别选择1.8、2.8、4.3和7 m等4个聚焦点,并将4个编码信号分别对应延时产生聚焦信号,并将对应阵元信号累加激励发射阵元。通过仿真可得目标回波强度图如图7,由图可以看出水平距离在-10~10 m的范围内,都具有较好的纵向角度分辨力。将3种方法的目标强度图对比定性分析可知,多焦点发射聚焦方法,相比发射未聚焦和单焦点发射聚焦2种方法,在近场范围内均有着较好的纵向角度分辨力,证实本文所提方法的优越性。
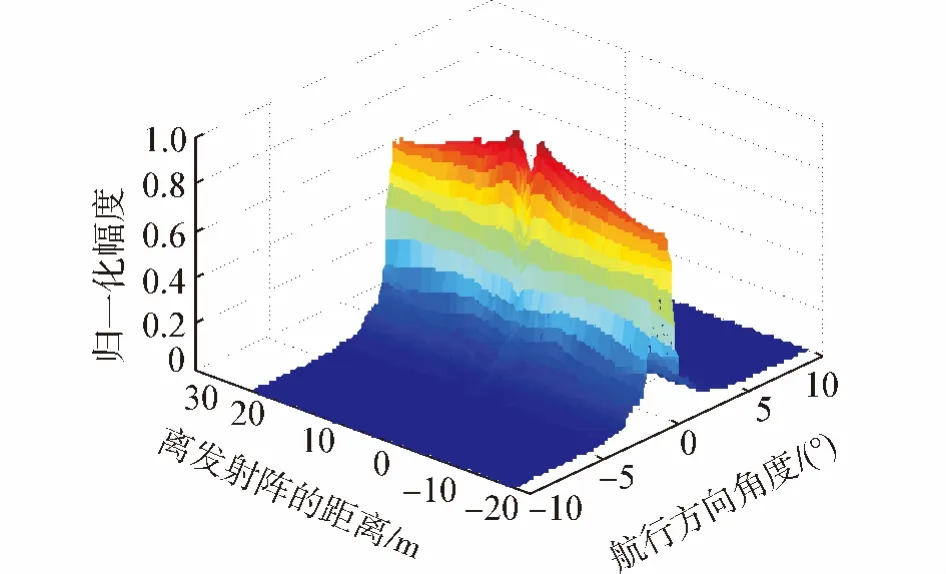
图7 多焦点聚焦的目标回波强度图Fig.7 The diagram of multi-focal target echo intensity
2.4 结果分析
为定量分析,本文引入波束宽度和ISLR2个概念来分析3种情况下的目标回波,波束宽度越小,纵向角度分辨力越好,ISLR越高,则在关心目标区域的能量越集中。
2.4.1 波束宽度分析
首先以-3 dB原则仿真未聚焦、单焦点发射聚焦和多焦点发射聚焦的波束宽度,并按离发射阵的距离为横轴,以波束宽度为纵轴,将3种条件下的波束宽度在图8中绘图,由图可以看出未聚焦情况下,波束宽度在距离基阵较近时较大,随着距离的增加,波束宽度逐渐变小,纵向角度分辨力变差。而单焦点发射聚焦时,只在聚焦点处波束宽度较小,随着距离变大,波束宽度逐渐变大,纵向角度分辨力变差。而多焦点发射聚焦则集成了两者的优点,从距离基阵2~8 m的范围内都维持在1.4°左右,在整个近场范围内都保持了较小的波束宽度,纵向角度分辨力较好。
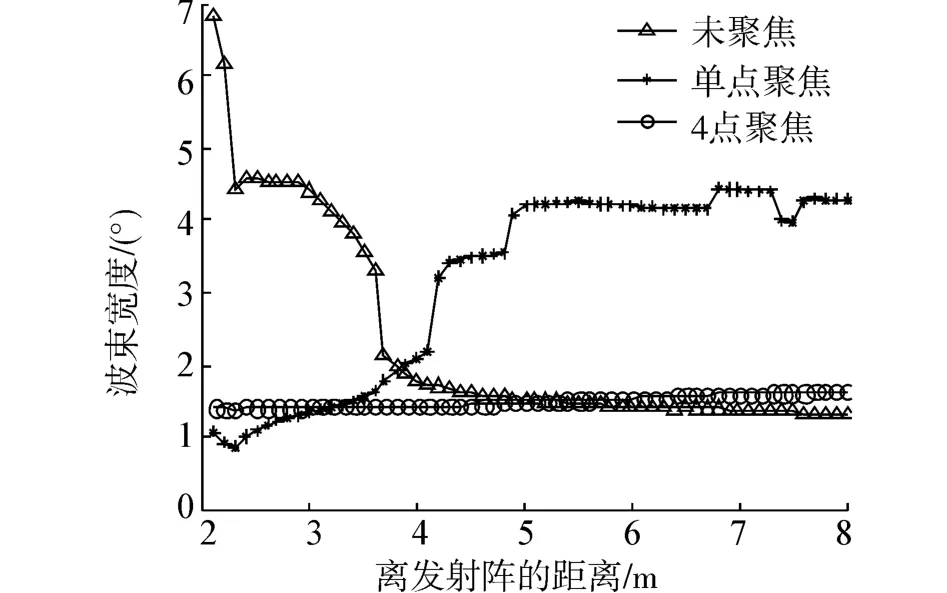
图8 3种方法的波束宽度对比Fig.8 Beam width comparison with three methods
2.4.2 ISLR分析
在多波束测深系统中,常以远场纵向角度分辨力和横向角度分辨力作为分辨力指标。由于受到近场效应的影响,多波束近场时波束宽度不再和远场时一样。为衡量3种方法的能量集中程度,本文按远场纵向角度分辨力来统一要求近场和远场的ISLR[13],远场情况下-3dB波束宽度为

由仿真参数可计算该角度为1.27°,由此定义本文中ISLR:

按式(12)原则仿真未聚焦、单焦点发射聚焦和多焦点发射聚焦的ISLR,如图9,由图可看出未聚焦时,ISLR在离发射阵较近时较低,随着距离增加,逐渐变大。而单焦点发射聚焦时,只在聚焦点处较高,随着距离变大,逐渐减小。多焦点发射聚焦则集成了两者的优点,在整个近场范围内都保持了较高ISLR。
通过上述定量分析,可看出多焦点发射聚焦在近场范围内相对未聚焦和单焦点发射聚焦有着较窄的波束宽度和较高的ISLR,从而可以定量说明本文所提方法在近场范围内有着较好的纵向角度分辨力。

图9 3种方法的波束宽度对比Fig.9 Beam width comparison with three methods
3 系统水池试验
为充分验证本文方法的有效性,在哈尔滨工程大学消声水池,以如图10的国产首套浅水宽覆盖多波束测深系统为实验设备,其中心频率为180 kHz,发射波束宽度为1.27°。将声呐发射阵侧放入水3 m,并将宽带标准水听器入水3 m,正对发射阵进行信号采集。并以发射阵为中心,标准水听器分别在距发射阵2、3、5和8 m的地方监测发射信号,在多波束测深系统的纵向角度方向以0.1°为步进,在-10°~10°范围内分别监听,以有效信号长度的平均功率为基准,分别计算不同位置的未聚焦、单焦点发射聚焦和多焦点发射聚焦3种情况的波束宽度和ISLR,其试验结果如表1、表2和表3。

图10 浅水宽覆盖多波束测深系统Fig.10 Wide coverage shallow water bathymetry
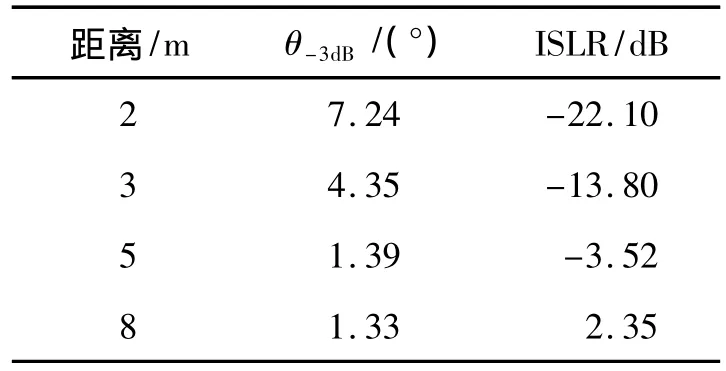
表1 未聚焦的波束宽度和ISLRTable 1 Beam width and ISLR of unfocused transmission

表2 单焦点发射聚焦的波束宽度和ISLRTable 2 Beam width and ISLR of single-focal transmission

表3 多焦点发射聚焦的波束宽度和ISLRTable 3 Beam width and ISLR of multi-focal transmission
从表1中可以看出,由于未聚焦的原因在2 m和3 m时波束宽度较宽,ISLR较低,而随着距离的变大,逐渐符合远场条件,到8 m时波束宽度逐渐变小,ISLR也逐渐变高,纵向角度分辨力提高;从表2中可以看出,由于发射聚焦点在2 m位置,2 m和3 m时波束宽度较小,同时ISLR也较大,而随着距离的变大,出现散焦现象,到8 m时波束宽度逐渐变宽,ISLR也逐渐变低,纵向角度分辨力降低;而从表3中可以看出,由于采用了多焦点发射聚焦,从2~8 m的范围都保持了较小的波束宽度和较高的ISLR,纵向角度分辨力较高。由此可看出试验结果和仿真结果基本契合,再次证明本方法的有效性。
4 结论
本文研究了基于Kasami编码的多波束多焦点发射聚焦方法,并得到以下结论:
1)同时发射多个聚焦到不同焦点的Kasami编码信号,在单次发射时实现了多个焦点的聚焦,通过仿真和水池试验研究表明,本文所提方法相较未聚焦和单点聚焦而言,在整个近场范围内有较窄的发射波束宽度和较高的ISLR;
2)本方法应用到国产浅水宽覆盖多波束测深系统中有效地提高系统的近场纵向分辨力,具有重要的实际工程应用价值;
3)由于采用了编码信号,系统发射和接收的复杂度增加,整个系统的实现成本相应增加,但对于近场高精度测深需求而言,本文方法是在系统性能与成本之间折衷的一种成功方案。
[1]周天,李海森,么彬.近场源定位算法在水声主动成像系统中的应用[J].武汉理工大学学报,2008,30(5): 135-138.
ZHOU Tian,LI Haisen,YAO Bin.Application of positioning algorithm for near-field sources in underwater acoustic active mapping system[J].Journal of Wuhan University of Technology,2008,30(5):135-138.
[2]HUANG Jing,ZHOU Sheyu,ZHOU Shiguan,et al.Characteristic research on focused acoustic field of linear phased array transducer[C]//2009 9th International Conference on Electronic Measurement and Instruments.[S.l.],2009.
[3]BESSONOVA O V,KHOKHLOVA V A,BAILEY M R,et al.Focusing of high power ultrasound beams and limiting values of shock wave parameters[J].Acoustical Physics,2009,55(4/5):463-476.
[4]LUNKOV A A,PETNIKOV V G,STROMKOV A A.Focusing of low-frequency sound fields in shallow water[J].A-coustical Physics,2010,56(2):228-233.
[5]TANCRELL R H,CALLERAME J,WILSON D T.Nearfield,transient acoustic beam-forming with arrays[J].Ultrasonics Symposium,1978:339-343.
[6]陈宝伟.超宽覆盖多波束测深技术研究与实现[D].哈尔滨:哈尔滨工程大学,2012:35-60.
CHEN Baowei.Research and implementation of the technology for super-wide coverage multibeam bathymetry[D].Harbin:Harbin Engineering University,2012:35-60.
[7]周泽民,曾新吾.水声聚焦相控阵列及其声场特性研究[J].振动与冲击,2012,31(19):86-89,108.
ZHOU Zemin,ZENG Xinwu.An underwater focused acoustic phased array and its sound field characteristics[J].Journal of Vibration and Shock,2012,31(19):86-89,108.
[8]周锋.水声扩频通信关键技术研究[D].哈尔滨:哈尔滨工程大学,2012:52-61.
ZHOU Feng.The study of the key technologies for under water acoustic spread-spectrum communication[D].Harbin: Harbin Enigineering University,2012:52-61.
[9]于洋,周锋,乔钢.小Kasami序列的正交码元移位键控扩频水声通信[J].哈尔滨工程大学学报,2014,35(1): 81-86.
YU Yang,ZHOU Feng,QIAO Gang.Orthogonal code shift keying spread spectrum underwater acoustic communications employing the small Kasami sequence[J].Journal of Harbin Engineering University,2014,35(1):81-86.
[10]LAHTONEN J.On the odd and the aperiodic correlation properties of the Kasami sequences[J].IEEE Transactions on Information Theory,1995,41(5):1506-1508.
[11]WELCH L.Lower bounds on the maximum cross correlation of signals(Corresp.)[J].IEEE Transactions on Information Theory,1974,20(3):397-399.
[12]李海森,鲁东,周天.基于FPGA的多波束实时动态聚焦波束形成方法[J].振动与冲击,2014,33(3):83-88.
LI Haisen,LU Dong,ZHOU Tian.Multi-beam real-time dynamic focused beam-forming method based on FPGA[J].Journal of Vibration and Shock,2014,33(3):83-88.
[13]曾祥能,张永顺,何峰,等.相位编码信号的综合旁瓣能量改善技术[J].电波科学学报,2012,27(1):172-176.
ZENG Xiangneng,ZHANG Yongshun,HE Feng,et al.The integrated sidelobe level improved technology for phase coded waveform[J].Chinese Journal of Radio Science,2012,27(1):172-176.
