控制棒水压驱动系统水压缸参数特性分析
2015-03-20刘潜峰赵富龙薄涵亮秦本科
刘潜峰,赵富龙,薄涵亮,秦本科
(清华大学 核能与新能源技术研究院 先进反应堆工程与安全教育部重点实验室,北京 100084)
控制棒水压驱动技术是一种新型的内置式控制棒驱动技术[1],它是在对清华大学发明的控制棒水力驱动机构深入研究的基础上,结合商用压水堆磁力提升器的优点发展而来的。控制棒水压驱动技术采用3个水压缸驱动2个爪式机构工作的设计,一方面解决了压水堆磁力提升器将驱动机构置于压力壳外的缺点,使控制棒驱动机构置于反应堆压力壳内,同时保留爪式机构驱动的优点;另一方面,3个水压缸依靠水的静压驱动,解决了控制棒水力驱动系统动压驱动因工况变化而引起驱动特性复杂的缺点,使控制棒能够准确定位和步进运动,并具有较大的过载能力。这样,内置式控制棒驱动机构不会贯穿压力壳,传动线短,避免了弹棒事故,增强了反应堆的安全性。控制棒水压驱动系统不仅完全满足一体化布置核反应堆的使用要求,而且可推广到其他水堆,使其控制棒传动线缩短。
长期以来,通过实验方法组织研究了水压缸和驱动机构各方面的性能,包括控制棒水压驱动技术原理[1]、控制棒水压驱动机构单缸性能[2-5]和水压缸活塞环密封性能[6-7]。在基础实验的基础上,通过拟合方法对水压驱动机构的理论进行了部分研究[8]。该理论模型适用于实验范围内工况研究。为了拓展水压缸和驱动机构的分析范围,提出了从流体理论出发建立普适的水压缸和驱动机构理论模型的要求,并用理论方法分析了驱动机构性能。
本文就控制棒水压驱动系统运行过程中所出现的工况,利用流体力学理论方式对水压缸进行理论建模,并对重要参数进行步进过程分析。
1 计算模型
1.1 实物对象
图1为水压缸装配图。当电磁阀打开后,在压头的驱动下,水通过水压缸注流入口进入水压缸,入缸流量从零逐渐增加。当水压缸压力增加到一定值后,水压缸内套开始步升运动,大小密封环有流量溢出。当水压缸内套运动15mm 后,步升至终点,缸内压力继续上升直到稳定。由于此时大密封环顶住堵头,故其无流量溢出。
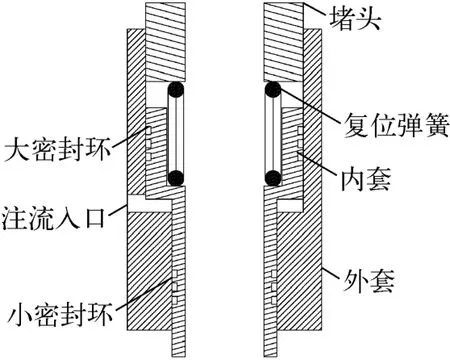
图1 水压缸装配图Fig.1 Assembly diagram of hydraulic cylinder
1.2 物理描述
经过必要简化可得出水压缸充压物理模型,如图2所示。首先,将水压缸视为等截面模型;其次,将水压缸简化看作准静态模型,假设缸内压力分布均匀且考虑水的可压缩性和温度的变化。其中,pcy为水压缸内压力,p1为泵压,v1为入口流速,p2为大密封环处压力,v2为大密封环处流速,p3为小密封环处压力,v3为小密封环处流速,Mp为自身载荷,Ms为 外 界 载 荷,Fk为 弹 簧 力,p0为 环 境 压 力,S 为 内 套 截 面 积,fp为 内 套 壁 面 摩 擦 力,g 为重力加速度。
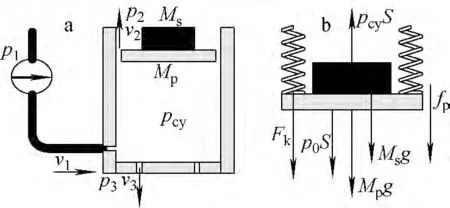
图2 水压缸充压物理模型Fig.2 Physical model of pressure process of hydraulic cylinder
在流体方面,水流通过泵压p1升压,后经过入口管道进入水压缸注水室,且流速为v1。这里用摩擦阻力来等效总阻力大小,是因为可用变化管道长度和管道直径形成的摩擦阻力来等效包括局部阻力和实际摩擦阻力的总阻力大小。
如图2a所示,由于水压缸注水,缸内压力pcy增加,缸内套逐步运动到终点,速度为vp,而这其中一部分水流通过大密封环和小密封环泄漏到水压缸外,且流速分别为v2和v3。对于水压缸可列出流体连续性方程。
由于密封环泄漏模型内流道宽度远大于外流道宽度,故采用迷宫密封模型[9]。
在固体方面,水压缸内套在缸内压力pcyS作用下,逐步克服自身重力Mpg、外界载荷重力Msg、壁面摩擦力fp、弹簧力Fk和外界环境压力p0S,开始向上运动,受力情况如图2b所示。对于水压缸内套可列出运动方程。
1.3 数学表述
1)泵的性能曲线
泵的性能曲线方程为入口流速的函数,每一个流速必有一个确定的泵压。

其中,apu、bpu、cpu为泵性能曲线系数。
2)管道能量方程
管道两端的能量差等于流体动能与流动阻力消耗能量之和。

其中:μ 为动力黏度;t为温度;h1为泵出口比焓;hcy为水压缸内比焓;β 为流动阻力修正系数;L 为管道长度,m;De为管道直径,m。
3)水压缸连续性方程
水压缸流入的质量与水压缸泄漏的质量之差等于水压缸缸内质量的变化。

其中:K 为水的体积弹性系数[10],随温度变化;X 为内套位移。
4)泄漏流量方程
对于大内套环,流动阻力方程[9]为:


对于小内套环,流动阻力方程为:
5)水压缸内套运动方程组
水压缸内套受到向上的缸内压力、向下的环境压力、自身载荷、外界载荷、弹簧力和滑动摩擦力。式(7)与水压缸内套位移方程(8)组成水压缸内套运动方程组。
其中:k为复位弹簧系数;ε为壁面摩擦系数。
6)水的物性方程
本模型中水的物性参数方程主要是由当前的温度和压力得到当前水的密度,其主要是根据1980Reynolds推荐的国际单位制水蒸气物性方程得出[11-12]。

求解流程参见文献[11-12]。综上所述,最后可得到水压缸充压理论模型。
1.4 模型求解
模型采用有限差分法求解。由于模型方程系数矩阵中的K 值较大,为2.2×109N/m2,故方程系数矩阵为刚性矩阵,因此求解时间步长较小,对模型采用等时间步长h=0.000 01s。
2 计算方案
计算工况中6种参数的取值列于表1。温度为20 ℃,环境压力为0.1 MPa,各参数组合后分别对水压缸的充压和泄压过程进行计算,分析各参数对水压缸内套运动时间和水压缸内套运动到终点瞬间冲击能量的影响。

表1 计算工况Table 1 Computation condition
3 计算结果
在不同密封环泄漏通道宽度d、外界载荷Ms、弹簧系数k、管道直径De和管道长度L下,泵扬程H1分别为130、100、70、40m 时,各输出物理量随泵扬程的变化示于图3。由图3a可知,随着泵扬程增加,水压缸内套运动时间减少。由图3b可知,随着泵扬程增加,水压缸内套运动到终点瞬间冲击能量增大。
在不同密封环泄漏通道宽度、外界载荷、弹簧系数、管道直径和泵扬程下,管道长度分别为2、4、6和8m 时,各输出物理量随管道长度的变化示于图4。由图4a可知,随着管道长度增加,水压缸内套运动时间增加。由图4b可知,随着管道长度增加,水压缸内套运动到终点瞬间冲击能量减小。
在不同密封环泄漏通道宽度、外界载荷、弹簧系数、管道长度和泵扬程下,管道直径分别为0.006、0.007、0.008、0.009 m 时,各输出物理量随管道直径的变化示于图5。由图5a可知,随着管道直径增加,水压缸内套运动时间减少。由图5b可知,随着管道直径增加,水压缸内套运动到终点瞬间冲击能量增加。

图3 各输出物理量随泵扬程的变化Fig.3 Physical variable with pump head changing

图4 各输出物理量随管道长度的变化Fig.4 Physical variable with pipe length changing
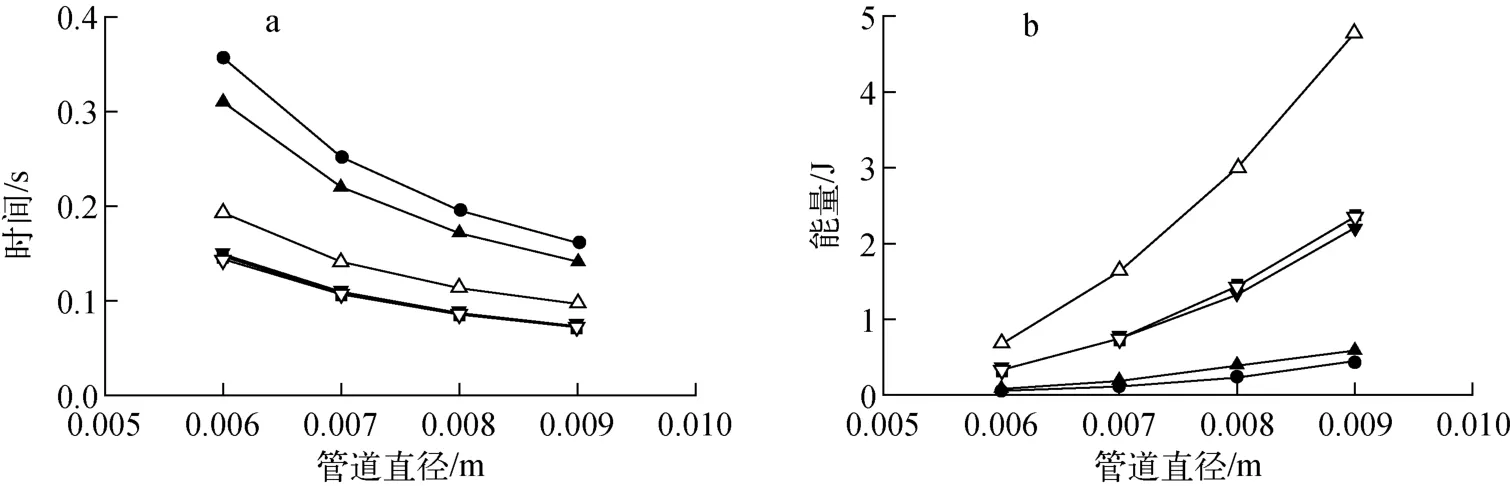
图5 各输出物理量随管道直径的变化Fig.5 Physical variable with pipe diameter changing
在不同密封环泄漏通道宽度、外界载荷、管道长度、管道直径和泵扬程下,弹簧系数分别为4.5、9.0、13.5、18.0kN/m 时,各输出物理量随弹簧系数的变化示于图6。由图6a可知,随着弹簧系数增加,水压缸内套运动时间增加,但增幅较小。由图6b可知,随着弹簧系数增加,水压缸内套运动到终点瞬间冲击能量减小,减幅较小。
在不同密封环泄漏通道宽度、弹簧系数、管道长度、管道直径和泵扬程下,外界载荷分别为30、70、110和150kg时,各输出物理量随外界载荷的变化示于图7。由图7a可知,随着外界载荷增加,水压缸内套运动时间增加。由图7b可知,随着外界载荷增加,水压缸内套运动到终点瞬间冲击能量增加。

图6 各输出物理量随弹簧系数的变化Fig.6 Physical variable with spring coefficient changing
在不同外界载荷、弹簧系数、管道长度、管道直径和泵扬程下,密封环泄漏通道宽度分别为0.06、0.05、0.04mm 时,各输出物理量随密封环泄漏通道宽度的变化示于图8。由图8a可知,密封环泄漏通道宽度增加,水压缸内套运动时间增加。由图8b可知,密封环泄漏通道宽度增加,水压缸内套运动到终点瞬间冲击能量减小,但减幅较小。

图7 各输出物理量随外界载荷的变化Fig.7 Physical variable with external load changing
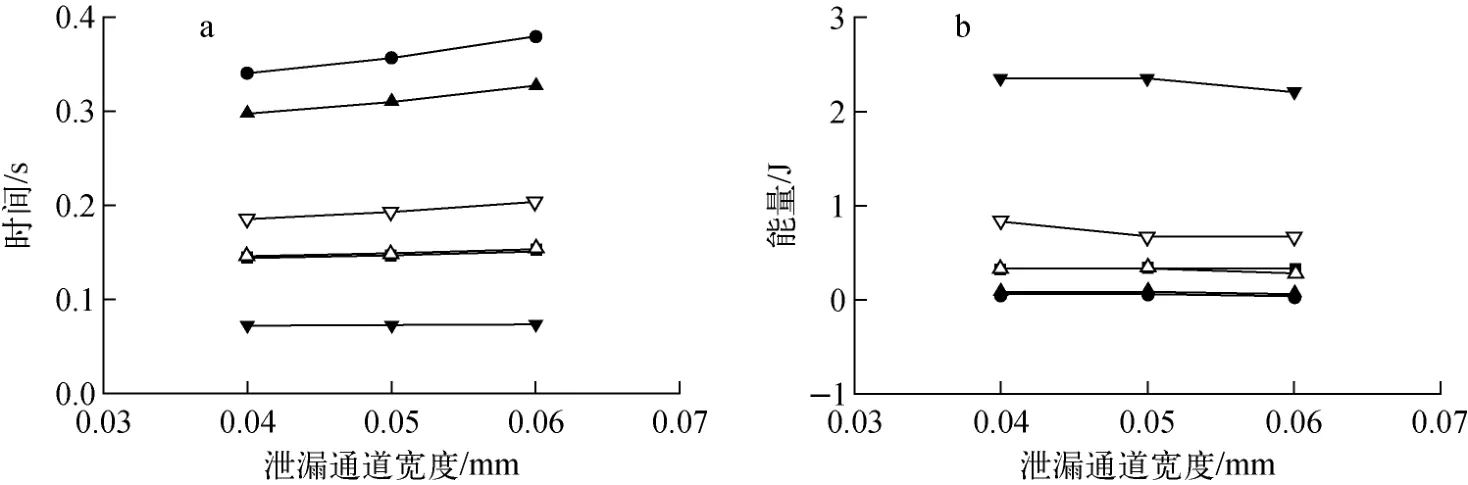
图8 各输出物理量随密封环泄漏通道宽度的变化Fig.8 Physical variable with seal ring leakage channel width changing
4 结果分析
当密封环泄漏通道宽度为0.05mm、外界载荷为30kg、弹簧系数为4.5kN/m、管道直径为0.006m 和管道长度为2m,泵扬程分别为130、100、70和40m 时的入口流速、缸内压力和水压缸内套的速度示于图9。由图9a可知,泵扬程增加,管道流速增加,根据水压缸连续性方程可知,入口流速大小增加,缸内压力增加。由图9b可看出,随着泵扬程增加,水压缸内压力稳定后的值增加。由图9c可看出,随着泵扬程增加,水压缸内套加速度大小增加,速度大小增加,运动时间减小,根据内套运动方程可知,水压缸内压力增加,水压缸内套加速度大小增加,速度大小增加,运动时间减小,进一步导致水压缸内套运动到终点瞬间冲击能量增加。由图9可看出,泵扬程变化导致水压缸运动特性变化较大。
当密封环泄漏通道宽度为0.05mm、外界载荷为30kg、弹簧系数为4.5kN/m、管道直径为0.006m 和泵扬程为100 m,管道长度分别为2、4、6和8m 时的入口流速、缸内压力和水压缸内套的速度示于图10。由图10a可知,管道长度增加,管道流速减小,根据水压缸连续性方程可知,入口流速大小减小,缸内压力减小,但压力变化较小。由图10b可看出,随着管道长度增加,水压缸缸内压力减小。由图10c可看出,随着管道长度增加,水压缸内套加速度大小减小,速度大小减小,运动时间增加。根据水压缸内套运动方程,随着水压缸内压力减小,水压缸内套加速度大小减小,速度大小减小,运动时间增加,进一步导致水压缸内套运动到终点瞬间冲击能量减小。可看出,管道长度变化导致水压缸运动特性变化较大。
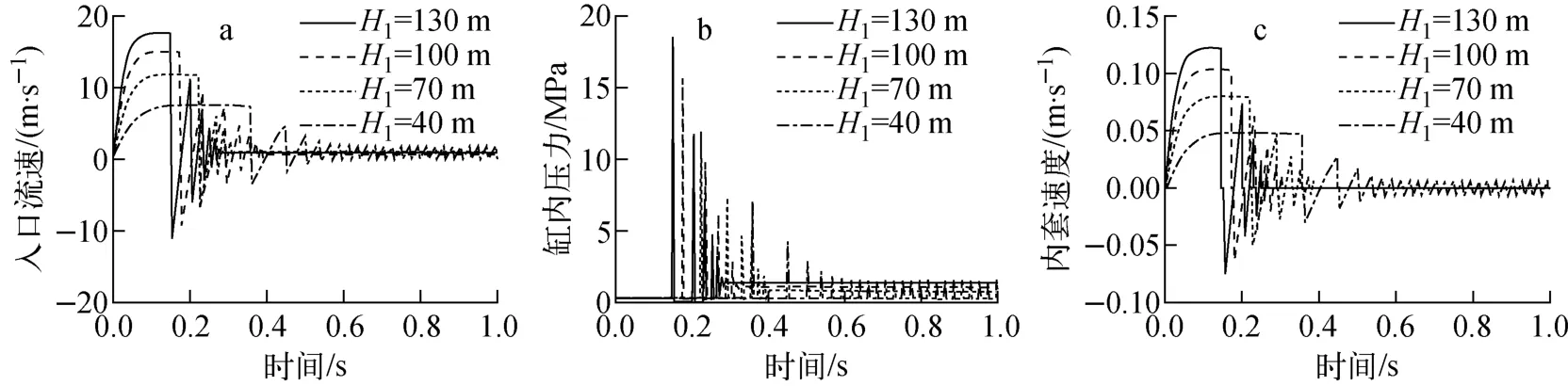
图9 不同泵扬程下各参数的变化Fig.9 Parameter variation with different pump heads

图10 不同管道长度情况下参数变化情况Fig.10 Parameter variation with different lengths of pipe
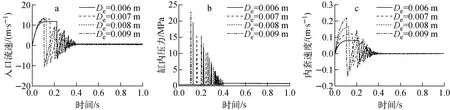
图11 不同管道直径情况下参数变化情况Fig.11 Parameter variation with different diameters of pipe
当密封环泄漏通道宽度为0.05mm、外界载荷为30kg、弹簧系数为4.5kN/m、管道长度为2 m 和泵扬程为70 m,管道直径分别为0.006、0.007、0.008 和0.009 m 时 的 入 口 流速、缸内压力和水压缸内套的速度示于图11。由图11a可知,在压力一定的情况下,根据管道能量方程,管道直径增加,管道流速增加。根据水压缸连续性方程可知,入口流速大小增加,缸内压力增加,但压力变化较小。由图11b可看出,随着管道直径增加,水压缸缸内压力增加。由图11c可看出,随着管道直径增加,水压缸内套加速度大小增加,速度大小增加,运动时间减小。这是因为根据水压缸内套运动方程,水压缸内压力增加,水压缸内套加速度大小增加,速度大小增加,运动时间减小,进一步导致水压缸内套运动到终点瞬间冲击能量增加。可看出,管道直径变化导致水压缸运动特性变化较大。
当外界载荷为30kg时水压缸物理量实验值与计算值的比较示于图12。由图12 可看出,入口流速和内套位移计算值均与其相应实验值符合较好,但缸内压力计算值与实验值符合较差,这归因于步升前充压阶段缸内压力增加较快,很快进入步升增压阶段,两阶段无明显的区分,而在步升至顶端后充压阶段由于压力的突变导致出现压力波动的现象。

图12 外界载荷为30kg时水压缸物理量实验值与计算值比较Fig.12 Comparison of hydraulic cylinder physical variable between experiment and computation at exterior load of 30kg
5 小结
1)建立和验证了水压缸充压理论模型,该模型能提供各个所需的物理量,为水压缸和驱动机构运动机理分析提供了理论基础。
2)对水压缸参数进行单变量特性分析,得出了各参数对水压缸运行特性的影响结果,为驱动机构的驱动力优化提供了分析基础。结果表明:泵扬程越高,水压缸内套运动越快,冲击能量越大;管道长度越短,水压缸内套运动越快,冲击能量越大;管道直径越大,水压缸内套运动越快,冲击能量越大;弹簧系数越小,水压缸内套运动越快,冲击能量越大;外界载荷越小,水压缸内套运动越快,冲击能量越大;密封环泄漏通道宽度越小,水压缸内套运动越快,冲击能量越大。
3)泵扬程、管道长度和管道直径对水压缸运动影响较大,为水压缸和驱动机构的驱动力优化奠定了分析基础。
4)通过实验验证了理论模型,各物理量实验值和计算值符合较好。
[1] 薄涵亮,郑文翔,王大中,等.核反应堆控制棒水压驱动技术[J].清华大学学报:自然科学版,2005,45(3):424-427.BO Hanliang,ZHENG Wenxiang,WANG Dazhong,et al.Hydraulic control rod drive technology for nuclear reactors[J].Journal of Tsinghua University:Science and Technology,2005,45(3):424-427(in Chinese).
[2] 秦本科,薄涵亮,郑文祥,等.控控制棒水压驱动机构单缸步进动态过程[J].清华大学学报:自然科学版,2005,45(3):428-431.QIN Benke,BO Hanliang,ZHENG Wenxiang,et al.Single cylinder stepping motion for the control rod hydraulic drive mechanism[J].Journal of Tsinghua University:Science and Technology,2005,45(3):428-431(in Chinese).
[3] 秦本科,薄涵亮,郑文祥,等.控制棒水压驱动机构水压缸步升压力变化过程[J].清华大学学报:自然科学版,2008,48(12):2 118-2 121.QIN Benke,BO Hanliang,ZHENG Wenxiang,et al.Pressure transients in hydraulic cylinder step-up mot ion of control rod hydraulic drive mechanism[J].Journal of Tsinghua University:Science and Technology,2008,48(12):2 118-2 121(in Chinese).
[4] 秦本科,薄涵亮,郑文祥,等.控制棒水压驱动机构水压缸步降过程研究[J].原子能科学技术,2009,43(4):345-349.QIN Benke,BO Hanliang,ZHENG Wenxiang,et al.Study on step-down dynamic process of hydraulic cylinder for control rod hydraulic drive mechanism[J].Atomic Energy Science and Technology,2009,43(4):345-349(in Chinese).
[5] 秦本科,薄涵亮,郑文祥,等.控制棒水压驱动机构水压缸步降过程运动阻力研究[J].原子能科学技术,2009,43(5):435-440.QIN Benke,BO Hanliang,ZHENG Wenxiang,et al.Kinetic resistance of hydraulic cylinder for control rod hydraulic drive mechanism in stepdown motion process[J].Atomic Energy Science and Technology,2009,43(5):435-440(in Chinese).
[6] 秦本科,薄涵亮,郑文祥.水压缸活塞环密封流动阻力研究[J].原子能科学技术,2005,39(3):236-239.QIN Benke,BO Hanliang,ZHENG Wenxiang.Flow resistance of hydraulic cylinder piston ring seal structure[J].Atomic Energy Science and Technology,2005,39(3):236-239(in Chinese).
[7] 秦本科,薄涵亮,郑文祥.水压缸活塞环密封运动阻力研究[J].原子能科学技术,2006,40(2):235-239.QIN Benke,BO Hanliang,ZHENG Wenxiang.Kinetic resistance of hydraulic cylinder piston ring seal structure[J].Atomic Energy Science and Technology,2006,40(2):235-239(in Chinese).
[8] 秦本科.核反应堆控制棒水压驱动技术研究[D].北京:清华大学,2005.
[9] 华绍曾,杨学宁.实用流体阻力手册[M].北京:国防工业出版社,1985:422.
[10]秋元德三.水击与压力脉动[M].北京:电力工业出版社,1981:35.
[11]REYNOLDS W.Thermodynamic properties in S.I.[M].California:Stanford Press,1980.
[12]薄涵亮.卡林那循环的热力学分析[D].西安:西安交通大学,1988.
