水下自主机器人接驳碰撞过程分析
2015-03-19史剑光李德骏杨灿军蔡业豹
史剑光,李德骏,杨灿军,蔡业豹
(浙江大学 流体动力与机电系统国家重点实验室,浙江 杭州310027)
水下自主航行器(autonomous underwater vehicle,AUV)接驳技术是应AUV水下充电和水下数据交换需求发展起来的新技术,在海洋探测领域具有十分重要的作用.近年来,国内外已有多家单位对该技术进行了相关研究[1-7].随着海底观测网络技术的发展[8-9],接驳系统的水下供能问题得到解决,使其长期工作于水下成为可能.AUV水下接驳技术的主要目标是在水下对AUV进行充电和数据交换,从而延长AUV的作业时间,省去AUV的回收工作.AUV水下接驳系统由经过改装的AUV和水下接驳站组成.接驳过程如下:AUV通过导引技术航行到接驳站的所在位置,并通过引导机构进入接驳站;由接驳站对AUV进行固定,并完成能量和信号传输等工作,充电完毕后AUV可以驶出接驳站开始新的作业任务.接驳站的结构直接关系到AUV的导引精度、AUV的结构改造以及接驳过程的难易程度.目前常见结构主要有杆-夹型结构[4]、钩-链型结构[3]、金字塔型结构[3]以及喇叭状开口型结构[3].经过比较之后,本课题采用对AUV改动最小、实用性最强的喇叭状开口型结构方案.
喇叭状开口结构是指在接驳站的前端设置喇叭状导引入口,只要AUV进入喇叭口范围,就可以被其引导进入接驳站,进行接下去的接驳任务.喇叭口设计可以降低对AUV导引精度的要求,并且不要求AUV上具备机械对接机构,对AUV的改动小.因此,喇叭状开口结构在接驳系统中得到较为广泛的应用.然而喇叭口的设计也存在一系列的问题,如:怎样的开口形状有利于AUV进入喇叭口;喇叭口的开口角度需要多大;用什么材料制造;对AUV的形状、性能要求如何;在什么位置进入喇叭口比较合理等.将AUV进入喇叭口的过程称为入坞,顺利入坞是接驳任务成功的关键,但是目前尚无公开文献报道这方面的研究.本文在ADAMS虚拟样机软件中建立AUV水下入坞碰撞模型,结合水池试验对上述问题进行分析.
1 接驳系统结构设计

图1 AUV接驳系统示意图Fig.1 AUV docking system
接驳系统的结构需要满足接驳系统的功能需求.尽可能简化和优化接驳过程,以较少的模块实现设计功能.接驳系统的总体结构(如图1所示)由支架、喇叭口及耐压腔体等结构组成,通过水密线缆与海底观测网络的接驳盒连接.其中,喇叭口的设计跟AUV的入坞密切相关.图2列出了具有不同喇叭口结构的接驳系统:图2(a)是美国MBARY研究所研制的适用于直径为54 cm的AUV接驳系统[3],图2(b)是 WHOI的REMUS100水下机器人专用接驳系统[10],图2(c)是欧洲几家研究单位共同研制的 EURODOCKER 接驳系统[11].
本系统采用非接触的方式对AUV进行充电和数据交换,需要在AUV和接驳站上安装线圈和天线.AUV进入接驳站后和接驳站上的线圈以及天线需各自对准.经过综合考虑,采用如图3所示的结构.在AUV上安装附加基座,用以固定线圈和天线.基座的前端装有金属块,当AUV进入接驳站后,金属块被接驳站上的电磁铁吸合,由此实现AUV的锁紧.此时,AUV上的线圈和天线正好跟接驳站上的线圈天线对准.基座的前端被设计成锥形以便其顺利地进入到锁紧位置,其锥角为36°.AUV的外径为220 mm、基座外径为290 mm,喇叭口接到内径为296 mm的导筒上,导筒通过锥角过渡到直径为230 mm的内孔.

图2 具有不同喇叭口形状的AUV接驳系统Fig.2 Different types of AUV docking system with different cone entrances

图3 接驳系统的喇叭口结构示意图Fig.3 Structure of cone of docking system
2 水下碰撞过程建模
虚拟样机软件(automatic dynamic analysis of mechanical systems,ADAMS)在静力学、运动学和动力学上有着很强的分析能力,并且含有碰撞力模型,可以对冲击和碰撞过程进行捕捉分析.采用ADAMS对接驳碰撞过程进行分析.首先,建立AUV和喇叭口的三维模型,并对实际模型进行适当简化;其次,给各部件赋予质量、初速度及约束等属性;最后,为各部件加入受力状况.仿真模型如图4所示.
碰撞过程中,AUV的受力状况十分复杂,受到重力、浮力、推进力、水动力和碰撞力的作用.重力和浮力基本相互抵消,但是AUV仍然有轻微的正浮力.模型施加跟质量相关的正浮力(假设重心和浮心重合).下面重点介绍水动力和碰撞力.

图4 AUV水下接驳系统ADAMS仿真模型Fig.4 ADAMSsimulation model of AUV docking system
2.1 AUV水动力建模
水下的碰撞不同于空气中的碰撞,因为物体在水中受到水动力的作用.水动力主要包括由速度引起的黏性力和由加速度引起的质量力[12].由于AUV在碰撞过程中侧向速度很小,只考虑AUV在前进方向的黏性力,即水阻力.假设AUV在碰撞前做匀速直线运动,在AUV体坐标系中,推进力Fp和水阻力Fr相互平衡,而Fr跟AUV的前进速度v及水阻尼系数C有关:

仿真过程中,假设Fp和推进速度v0恒定,则阻尼系数可由C=Fp/v20得到.碰撞发生后,AUV的前进速度减小,水阻力也随之减小.
碰撞过程中,AUV的加速度较大,受到较大的质量力.在潜器的动力学模型中,质量力常以附加质量的形式出现.假设在AUV体坐标系中,χ方向的附加质量系数为Caχ,物体的质量为M,则动力学方程中物体等效质量为M(1+Caχ),相当于在该物体上附加随物体运动的水流质量.空间坐标系中每个方向上的附加质量和附加转动惯量均不相同,但是在ADAMS中物体的质量只有一个,且不能在不同方向上赋予不同的值.因此在建模过程中,将附加质量以质量力的形式加到AUV的质心上.质量力相当于水流施加在AUV上的惯性力,因此,其计算公式如下:

式中:Fmχ、Fmy、Fmz分别为3个方向上由附加质量导致的水动力;Mmχ、Mmy及Mmz分别为3个方向上由附加转动惯量导致的水动力矩;Iχχ、I yy及I zz分别是AUV 绕3个轴的转动惯量;Caχ、Cay、Caz、Crχ、Cry及Crz分别是3个方向的附加质量系数和附加转动惯量系数,AUV的附加质量系数和附加转动惯量系数一般需要通过实验测得,文献[13]对潜器的水下碰撞机理进行了研究,并且对圆柱形物体的水动力参数进行了分析和计算,本文的分析参考该文献提供的近似数据;aχ、a y、a z、αx、αy、αz是 AUV 在3个方向的加速度和角加速度,可以在ADAMS软件中设置测量值得到.
2.2 碰撞力建模
碰撞力的大小受到材料、接触面状况及碰撞速度等多种因素的影响,很难通过精确计算获得.ADAMS中采用了应用较为广泛的弹簧阻尼模型[14-15]模拟碰撞力Fi,其函数如下:

式中:q为接触物体之间的实测位移变量,q0为位移变量阈值.当q<q0时,碰撞发生,产生碰撞力.碰撞力的第1项是Hertz弹性碰撞力,q0-q代表穿透深度,k为Hertz接触刚度,c为非线性指数;第2项是阻尼力,与阻尼系数c和透入速度相关,c按照step函数变化,当穿透深度q0-q达到阈值d时,阻尼系数达到最大值Cmax.
为各参数赋予适当的值是仿真成功的关键.接触刚度可由下述等式得到[16]:

式中:R和E分别是等效弹性模量和等效接触半径,由下式计算得到:

其中,R1、R2分别为接触点处两物体的曲率半径,E1、E2分别为两物体的材料弹性模量,μ1、μ2分别为两物体的材料泊松比.AUV的导流罩采用有机玻璃材料加工制成,喇叭口采用玻璃纤维材料和ABS材料制成,3种材料在碰撞性能上相近.为简化模型,各模型的材料均设定为ABS材料.椭球形的导流罩使得AUV和喇叭口接触点半径在碰撞过程中发生变化,从而导致接触刚度的变化.模型中对此情况作了简化,R1取导流罩的平均半径,R2取无穷大.
查得材料参数后,即可运用式(4)~(6)计算出接触刚度.c和d取ADAMS帮助手册的推荐值,Cmax跟碰撞过程的能量损耗相关,一般需要通过实验测定,ADAMS帮助文件中建议取值为接触刚度k的1%左右.本模型采用MKS单位制,k的单位为N/m,与ADAMS默认的N/mm的换算关系为1 N/m=1 000cN/mm,本模型中c=2,故1 N/m=106N/mm.在 MKS单位制中,Cmax的单位是Ns/m,与ADAMS默认的 Ns/mm的换算关系为1 Ns/m=103Ns/mm,因此,按照 MKS单位制以及ADAMS帮助文件中的建议值,本模型中的Cmax取k的0.001%.
3 仿真分析
综合以上分析结果,在ADAMS仿真模型中加入质量力和碰撞力.各参数初始值如表1所示.

表1 仿真模型各参数初值列表Tab.1 Initial values of parameters of simulation model_
由于实际AUV中存在舵等机构,且AUV的浮心一般比重心高,AUV在运行过程中横滚很小.因此,建模时设置较大的Crz值以限制AUV的横滚.推进力和推进速度根据AUV的实测参数设定.另外,为体现喇叭口的导引能力,在设置AUV的初始位置时,给予AUV一定的偏距.AUV的初始位置设定在喇叭口中心线正上方0.4 m处,轴线跟喇叭口中心线平行.表1中的f表示AUV的轴线到喇叭口中心线的距离.喇叭口的初始形状设为开口角θ=60°的锥形喇叭口.表1中的静摩擦系数μs和动摩擦系数μk均与材料及其表面光滑程度有关.本系统中因采用表面较光滑的非金属材料且有水的润滑作用,故取值较小.
下面在ADAMS水下碰撞仿真模型的基础上讨论喇叭口的形状、推进力、材料参数及偏距等因素对接驳过程的影响.接驳过程的质量主要由3个判断指标:AUV成功进入接驳站,接驳过程中的最大碰撞力Fmax和接驳时间td.其中第一点最为重要.而涉及到对结构的强度要求和对AUV的冲击,其取值越小越好.作为进入顺利程度的指标,td越小,接驳越顺利.
首先在表1列出的初始条件下对系统进行仿真,AUV用时10.5 s成功进入喇叭口,图5是整个过程的碰撞力变化曲线.图5中第一个尖峰是AUV首次跟喇叭口接触时的碰撞力.首次碰撞后,AUV经过较大的调整再次跟喇叭口的末端接触,产生第2个碰撞力尖峰,后期AUV的姿态调整相对较小,碰撞力也较小.所以,Fmax一般产生在首次碰撞或者第2次碰撞时.此外,碰撞过程也证实了带锥角的基座能够顺利进入喇叭口,因此前面的2次碰撞很大程度上决定了AUV的顺利入坞.在下述的仿真结果中,碰撞力的变化曲线形状与图4类似,不再赘述.
图5 接驳过程碰撞力变化曲线Fig.5 Fluctuation of impact force during docking process
3.1 喇叭口形状的影响
把喇叭口分为外轮廓线为曲线和外轮廓线为直线(锥形喇叭口)2类.把外轮廓线为直线的喇叭口按开口角度的大小进行比较.喇叭口的尺寸见图3,各喇叭口除长度外,其他尺寸均相同,曲线外轮廓线喇叭口的长度与60°开口的锥形喇叭口长度相同.在仿真模型中输入表1中各参数的初值,采用不同形状的喇叭口模型进行仿真.仿真结果显示,虽然入坞用时不同,但是多次仿真中,AUV均顺利入坞(下文的仿真结果中AUV也均顺利入坞,故不在表格中列出).表2为各种形状喇叭口的仿真结果.可以看出,随着锥形喇叭口的开口角度减小,碰撞力和接驳时间都一定程度地减小.但是减小喇叭口的开口角度会增加喇叭口的长度.此外,外轮廓线的曲线喇叭口有助于减小碰撞力,但是会增加接驳时间,并且曲线形状的喇叭口不易加工.为了实现结构上的平衡,同时降低安装和吊放难度,将喇叭口的长度限定在800 mm以内,60°开口的喇叭口长度在700 mm左右,此时接驳用时较短.故综合考虑后,认为60°开口的锥形喇叭口比较适合接驳.在下面的仿真分析中,均采用60°开口的锥形喇叭口.
表2 多种喇叭口形状的分析结果比较Tab.2 Simulation results of different types of cones
3.2 推进力的影响
假定本模型中AUV的水阻力系数不变,故推进力的大小也直接影响AUV的推进速度.原型AUV的推进力和推进速度由实验测得,根据式(1)可以估算出该AUV的水阻力系数为24.表3为不同推进力时的仿真结果.表3中的推进速度由式(1)计算得到.可以看出,当推进力增大时,碰撞力有所增大,接驳时间有所降低.然而,接驳时间的降低主要是由于速度增大,在碰撞姿态上变化不大.由此可见,推进力对接驳过程的影响较小,故不需要对接驳时的推进力进行严格的控制.

表3 多种推进力分析结果比较Tab.3 Simulation results under different propulsion forces
3.3 材料参数的影响
接触面材料的接触参数可能会对接驳过程产生影响.本节分开讨论各接触参数对接驳结果的影响.如表4所示为不同接触刚度下的接驳结果.较小的接触刚度下,碰撞力和接驳时间状况均较为理想.在仿真过程中,虽然AUV最终均顺利进入接驳站,但是可以看出,随着接驳时间的增长,碰撞过程中AUV的姿态会发生较大的变化,碰撞次数增多.在复杂的海洋环境中,这样的接驳过程存在较大风险.
如表5所示为不同阻尼系数下的接驳情况.可以看出,随着阻尼系数的增大,接驳时间变小.但是当阻尼系数过大时,碰撞力也变得较大.从仿真结果看,合适阻尼系数的值应为3.8~5×104.
如表6所示为不同摩擦状况下的接驳结果,当摩擦系数不是太大时,摩擦系数对接驳结果的影响不是很显著.但是,从总的趋势看,减小摩擦系数可以适当降低碰撞力并减少接驳时间,故光滑的表面有利于顺利接驳实现.

表4 多种接触刚度分析结果比较Tab.4 Simulation results under different stiffnesses of materials
表5 多种阻尼指数分析结果比较Tab.5 Simulation results under different damping coeffi-______cients of materials

表6 多种摩擦系数分析结果比较Tab.6 Simulation results under different smoothnesses of______materials
综合上述情况,喇叭口和AUV导流罩应选择接触刚度较小,阻尼系数适当大,表面较光滑的材料.实际选择中,以玻璃纤维等非金属材料较为合适.
3.4 偏距的影响
为便于比较,设定AUV初始位置在喇叭口中心线正上方一定的偏距处,轴线跟喇叭口中心线平行.如表7所示为不同偏距时的分析结果.可以看出,偏距越小,接驳越顺利.因此,提高AUV的导引精度,使AUV进入喇叭口时更接近喇叭口中心线位置,有利于实现顺利接驳.表7中当偏距为0.20 m时出现碰撞力突然增大的情况,原因可能是AUV在经历第一次碰撞后,由于碰撞力大小和碰撞位置不同,导致AUV不同的姿态改变.因此本研究的每一次仿真中,AUV第二次碰撞前的姿态以及AUV与接驳站的接触位置不同.当AUV与接驳站的接触位置中存在不平滑结构(如:凸起)时,碰撞力变大.尽管如此,最大碰撞力的总体趋势还是可以在一定程度上反映接驳过程的顺利程度.

表7 不同偏距分析结果比较Tab.7 Simulation results under different cross-track devia-_____tions
4 试验验证
在水池中对接驳过程进行初步测试,水池的长度为50.0 m,宽度为25.0 m,深度为1.2 m,可以完全浸没AUV.试验中,采用本实验室经过改装的混合型滑翔机作为AUV使用,其质量为84.0 kg,长度为2.0 m,直径为0.2 m,与仿真模型一致,推进速度为0.5 m/s.喇叭口固定在水池中,调整AUV的初始位置,使AUV从不同的角度驶向喇叭口.试验过程中,对6种不同的初始碰撞姿态进行测试和记录.图6为不同初始姿态的视频截图以及大致的初始位置.其中偏角是指AUV中轴线偏离喇叭口中轴线的角度.需要注意的是,偏角和偏距只能在一定程度上反映AUV的初始位置,由于AUV正浮力的存在,其入坞效果仅相对于竖直线左右对称(即在竖直线的左右对称位置,同样的偏距和偏角,其入坞姿态相同),而非相对于喇叭口中心对称,故初始姿态还需要结合截图进行判定.在ADAMS中用前文所述仿真模型对相应的初始姿态进行仿真,并比较碰撞姿态和碰撞时间.图6中标出了相应初始姿态下试验和仿真中的入坞用时tde和tds.可以看出,两者的对应程度较高.图7用碰撞过程截图的形式对仿真结果和试验结果中AUV的姿态变化进行比较.可见当初始姿态和推进速度一致时,仿真模型中AUV的姿态变化与试验过程中AUV的姿态变化对应.仿真结果与实际结果存在差别主要是由于:1)试验和仿真时的初始位置只是目测一致,实际上其差别存在不可避免;2)仿真模型在结构、水动力参数和接触面参数上进行了一定的近似和简化;3)碰撞力模型本身就是简化模型,与实际碰撞存在一定的差别.尽管如此,图6、7表明:仿真模型和实际试验结果较为符合.使用仿真模型对碰撞过程进行评估具有一定的可信度.
5 结 语
图6 不同初始姿态的试验接驳时间和仿真接驳时间比较Fig.6 Comparison of time spent in docking process under different initial attitudes in simulation results and experiment results
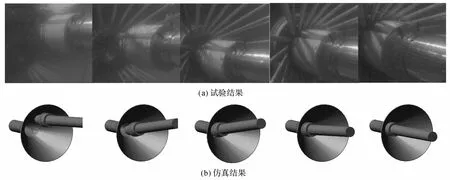
图7 碰撞过程AUV姿态变化比较Fig.7 Comparison of AUV attitudes during docking process
本研究采用ADAMS仿真模型对AUV水下接驳过程进行了评估,并通过水池试验对仿真模型的有效性进行了验证.仿真模型中,改变不同的参数进行了多次仿真,从仿真结果看,AUV最终均顺利的进入了喇叭口.这表明用喇叭口导引AUV进入接驳站十分有效.然而,参数的变化对接驳时产生的碰撞力和接驳时间存在一定的影响.在复杂的海底环境下,AUV尽可能顺利地进入接驳站.为此,通过减小喇叭口的开口角度(但是受到机构限制,喇叭口的开口角度不能过小),提高AUV导引精度使得AUV以尽可能小的偏距进入喇叭口.选用接触刚度较小、阻尼系数适当大、表面较光滑的喇叭口和导流罩材料均可以提高AUV接驳过程的成功率.
(
):
[1]PODDER T,SIBENAC M,BELLINGHAM J.AUV docking system for sustainable science missions[C]∥Proceedings of IEEE International Conference on Robotics and Automation.New Jersey:IEEE,2004,5:4478- 4484.
[2]燕奎臣,吴利红.AUV水下对接关键技术研究 [J].机器人,2007,29(3):267- 273.YAN Kui-chen,WU Li-hong.A survey on the key technologies for underwater AUV docking[J].Robot,2007,29(3):267- 273.
[3]MCEWEN R S,HOBSON B W,MCBRIDE L,et al.Docking control system for a 54-cm-diameter (21-in)AUV [J].IEEE Journal of Oceanic Engineering,2008,33(4):550- 562.
[4]SINGH H,BELLINGHAM J G,HOVER F,et al.Docking for an autonomous ocean sampling network[J].IEEE Journal of Oceanic Engineering,2001,26(4):498- 514.
[5]PYLE D,GRANGER R,GEOGHEGAN B,et al.Leveraging a large UUV platform with a docking station toenable forward basing and persistence for light weight AUVs[C]∥OCEANS,New Jersey:IEEE,2012:1- 8.
[6]潘光,黄明明,保维,等.AUV回收技术现状及发展趋势[J].鱼雷技术,2008,16(6):10- 14.PAN Guang,HUANG Ming-ming,SONG Bao-wei,et al.Current situation and development trend of AUV recovery technology[J].Torpedo Technology,2008,16(6):10- 14.
[7]张竺英,王棣棠,刘大路.自治式水下机器人回收系统的研究与设计[J].机器人,1995,17(6):348- 351.ZHANG Zhu-ying,WANG Di-tang,LIU Da-lu.The researching and designing of the recovering system for autonomous underwater vehicles[J].Robtics,1995,17(6):348- 351.
[8]CHEN Y,YANG C J,LI D J,et al.Design and application of a junction box for cabled ocean observatories[J].Marine Technology Society Journal,2012,46(3):50- 63.
[9]BARNES C R,BEST M M,ZIELINSKI A.The NEPTUNE Canada regional cabled ocean observatory[J].Sea Technology,2008,49(7):10- 14.
[10]STOKEY R,ALLEN B,AUSTIN T,et al.Enabling technologies for REMUS docking:an integral component of an autonomous ocean-sampling network[J].IEEE Journal of Oceanic Engineering,2001,26(4):487- 497.
[11]KNEPPER S,NIEMEYER M,GALLETTI R,et al.Eurodocker:a universal docking downloading recharging system for AUVs[C]∥ OCEANS.New Jersey:IEEE,2001,3:1463- 1467.
[12]WANG S,SUN X J,WANG Y H,et al.Dynamic modeling and motion simulation for a winged hybriddriven underwater glider[J].China Ocean Engineering,2011,25(1):97- 112.
[13]林一.潜艇耐压结构碰撞响应与强度评估方法研究[D].哈尔滨:哈尔滨工程大学,2009.LIN Yi.Research of on collision response and strength assessment method for submersible[D].Harbin:Harbin Engineering University,2009.
[14]LANKARANI H M,NIKRAVESH P E.A contact force model with hysteresis damping for impact analysis of multibody systems[J].Journal of Mechanical Design,1990,112:369.
[15]周志才,吴新跃,张文群,等.基于弹簧阻尼模型的碰撞动力学研究[J].湖北工业大学学报,2012,27(1):125- 128.ZHOU Zhi-cai,WU Xin-yue,ZHANG Wen-qun,et al.Study on contact dynamics based spring-damper mode[J].Journal of Hubei University of Technology,2012,27(1):125- 128.
[16]李强.新型类锥杆式对接机构的碰撞过程分析[D].长沙:国防科学技术大学,2009.LI Qiang.Collision analysis of a new quasi probe-cone docking mechanism [D].Changsha:National University of Defense Technology,2009.
