基于VB的TM30测量机器人变形监测系统开发
2015-03-17张书毕中国矿业大学环境与测绘学院江苏徐州221116
蒋 晨 张书毕(中国矿业大学环境与测绘学院,江苏 徐州 221116)
基于VB的TM30测量机器人变形监测系统开发
蒋 晨 张书毕(中国矿业大学环境与测绘学院,江苏 徐州 221116)
结合VB语言开发出了TM30测量机器人自动化变形监测系统,分析了该系统组成、数据串行通讯方式以及数据获取方式。为了提高观测数据的精度,着重对观测数据的处理方法进行了探讨,首先对原始观测数据进行差分处理以削弱公共误差的影响,然后利用MATLAB软件提供的小波分析工具箱对变形信号进行3层小波分解,对分解后得到的小波系数采用软阈值进行去噪,对去噪后的小波系数进行重构,以降低噪声影响。采用淮北矿区实际变形监测数据对该系统进行了测试,结果表明,该系统通过采用差分、去噪的处理思路,能够提高监测数据的精度及稳定性,对于矿区变形监测数据处理具有一定的借鉴作用。
TM30测量机器人 变形监测 差分处理 小波去噪
在传统的变形监测方法中,数据的采集、处理以及监测预警都是分开进行的,监测周期较长,观测数据误差来源较多,有些误差不易发现,极大地降低了观测数据的精度。近年来,测量机器人在变形监测中得到了广泛的应用[1],测量机器人能够将变形监测中的数据采集、处理及预报警等环节加以集成,既缩短了观测周期,减少了误差来源,又提高了观测数据精度,其优势在大坝、基坑边坡变形监测[2-4]等应用中得到了体现。为了对矿区地面开采沉降进行有效监测,基于VB语言开发出了TM30测量机器人自动化变形监测系统,该系统通过对测量数据引入差分及小波降噪的方法,以期提高监测数据精度。
1 自动化监测系统的组成
TM30测量机器人自动化变形监测系统由数据采集、数据通讯和数据分析3部分组成[5-7]。①数据采集部分的主要任务是控制测量机器人采集数据,可以全天候连续或者间歇性地采集数据,采集到的直接数据是角度和距离,通过角度和距离计算出监测点的三维坐标;②数据通讯部分在数据处理中心及测量机器人之间进行,主要负责在线控制及数据传输;③数据分析部分主要是对采集的数据进行实时处理分析,从而得到即时的变形特征,做出相应的预警。自动化监测系统的组成见图1。

图1 自动化变形监测系统的组成
2 系统数据通讯及数据获取
2.1 系统数据通讯
监测数据的串行通讯是指计算机通过自动化变形监测系统软件与测量机器人之间进行的通讯。测量机器人自身提供了两种数据通讯方式:①有线通讯是通过自身携带的一系列串口和USB接口,通过数据线与计算机连接起来进行数据传输;②无线通讯是利用电磁波而不通过电缆进行数据传输与交换的通信方式,该通讯有2种模式,一种是CDMA或GPRS调制解调器设备,另一种是传输电台,2种模式都可以作为远程数据的传输工具。
GEOCOM是莱卡仪器公司为测量机器人控制软件的二次开发提供的平台[8],在VB环境下利用GEOCOM二次开发出的自动化变形监测系统不仅能够使测量机器人与计算机以有线方式进行正确的端口连接,而且具备了在线设置测量机器人初始值以及数据记录等功能,能够将测得的数据直接传输至计算机,并以一定的格式进行存储,便于利用相关软件进行预处理及平差计算。
2.2 系统数据获取步骤及关键代码
2.2.1 设备连接
包括端口、波特率、数据位等设置,以打开连接,匹配成功后即可与计算机连接。
VB_COM_OpenConnection(ByVal Port As Integer,ByVal Baud As Integer,ByVal Retries As Integer).
If(RetCode = GRC_OK) Then
‘无通讯错误’
RetCode = VB_COM_OpenConnection(COM_1,COM_BAUD_19200,NUM_OF_RETRIES)
If(RetCode = GRC_OK) Then
bOpenAndRunning = True
End If
End If
2.2.2 初始化设置
(1)设置照准部到指定位置。
VB_AUT_MakePositioning4(Hz As Double,
V As Double,POSMode As Long,ATRMode As Long,bDummy As Boolean).
令rc =AUT_MakePositioning(1.3,1.6,POSMode,AUT_TARGET,FALSE),则rc=GRC_OK时执行成功.
(2)自动精确照准目标。
VB_AUT_FineAdjust3(dSrchHz AsDouble,
dSrchV As Double,bDummy As Boolean).
dHzSearchRange=0.08,
dVSearchRange=0.08,‘设置水平及竖直方向的自动搜索范围’
Result=AUT_FineAdjust(dHzSearchRange,dVSearchRange,FALSE)‘Result= GRC_OK时执行成功’
2.2.3 数据记录
包括水平角、竖直角和斜距的获取。
VB_TMC_GetSimpleMea(ByValWaitTime AsLong,
OnlyAngle As TMC_HZ_V_ANG,
SlopeDiastance AsDouble,ByValMode As Integer).
rc=TMC_GetSimpleMea(3000,OnlyAngle,SlopeDistance,TMC_MEA_INC), rc=GRC_OK时执行成功.‘ 3000为等待测距的时间,单位为ms’
2.2.4 关闭端口连接
VB_COM_CloseConnection( ).
整个通讯过程是支持远程控制的,因此,通过测量机器人可以使得测量人员不必进入现场,仅在项目部或者远程控制中心就能够对测量机器人进行指挥测量及管理。
3 监测数据处理
测量机器人在测量过程中不可避免地存在误差,有些误差是难以或者不能精确确定大小的,如大气折射带来的测距误差、施工对测站产生的不确定震动误差等。由于测量机器人具有较强的自动目标寻找、智能识别以及精确照准能力,因而可以对多个测量目标点可在短时间内完成持续、重复的观测工作[9],不确定因素带来的误差在同一环境、短时间内可视为固定值,因此,采用一定的处理方法,可以消除或减弱上述误差。
3.1 差分处理
监测点的三维坐标计算原理为:以测站点为原点,以定向方向为X轴,以测站天顶距方向为Z轴建立左手空间直角坐标系见图2,设原点O的坐标为(X0,Y0,Z0),监测点P的坐标为(XP,YP,ZP),S为斜距,v为竖直角,i为水平角。

图2 三维坐标计算原理示意
图2中,监测点P的三维坐标计算公式为
(1)
由此可见,三维坐标受方位角、垂直角及斜距的影响,其中,方位角和斜距是最主要的影响因素。
3.1.1 方位角差分
在进行角度测量时,认为每次测量的误差是相等的,方位角差分是把每一期测出的方位角i与第1期测出的方位角i0的差值作为本期方位角的改正值,
Δi=i-i0.
(2)
因此,若某期测得的监测点原始方位角为iJ,则其差分后的改正值为
Δi′=ij+Δi=iJ+i-i0.
(3)
3.1.2 斜距差分
斜距测量时,各次测量所含误差不相等,因此需要设置1个误差改正系数。设基准点到测站点的第1期斜距测量值为S1,第n期测得的基准点斜距为Sn,第n期监测点斜距为S′。由于同一周期内对某个监测点的观测时间很短,可以认为周围外界环境对监测点的误差影响是相同的、稳定的,因此可以把第n期观测得到的基准点斜距与第1期斜距之差与第n期实测斜距的比值作为第n期下的斜距改正系数,即
ΔS=(Sn-S1)/Sn.
(4)
于是,该测站其他监测点的斜距改正值为(1-ΔS)S′。
3.2 小波去噪
(1)小波分解。选用db3小波基函数对变形监测信号x进行3层小波分解,可调用MATLAB语句“[C,L]=wavedec(x,3,‘db3’)”来实现。
(2)阈值去噪。提取所有小波分解高频系数及第3层小波分解低频系数,对高频小波分解系数进行软阈值去噪(阈值按照Heuristic SURE准则来确定),部分MATLAB执行语句如下:
A3=appcoef(C,L,‘db3’,3);
D1=appcoef(C,L,1);
THR=thselect(x,‘heursure’);
DZ1=wthresh(D1,‘x’,THR).
(3)小波重构。即把低频信号以及经过处理的高频信号进行小波重构,从而得到降噪后的数据,MATLAB执行代码为:
CL=[A3,DZ3,DZ2,DZ1];
SL=waverec(CL,L,‘db3’).
4 应用实例
选取淮北矿区某沉降区域1栋建筑物作为试验对象,经实地勘察,以该矿区原有稳定基岩点作为高等级的控制点,如图3所示。在变形区域外设置了1个稳定的基准站,并与基岩点进行了联测,保证其精度的稳定性,同时在建筑物上设置了6个监测点。TM30测量机器人角度测量精度为0.5″,有棱镜模式下测距标称精度为(0.6 mm,1mm/km),无棱镜模式下测距标称精度为(2 mm,2 mm/km)[10-11],此次采用有棱镜模式进行试验。

图3 基准点及监测点分布示意
点位布设完毕后在基准点A处设站,对监测点进行了10周期的连续观测。每周期观测时,角度观测采用全圆观测法,观测4个测回,每条边观测次数设置为3次,采用有线数据通讯方式。以2#点和6#点为例,该2点的原始观测数据及经差分、小波去噪后的数据拟合曲线分别见图4、图5。
由图4、图5可知,采用TM30测量机器人进行变形监测能够反映出变形体的微小变化;降噪后的沉降曲线变化相对均匀,趋势比较平缓,说明降噪后数据的稳定性有一定的提高;6#点的每期累计沉降量均大于2#点,表明图3中建筑物右上部分沉降比较厉害,整体存在着不均匀沉降的现象。经调查发现,修建该建筑时,煤炭的开采离该区域较远,随着开采的进行,该区域受到了一定的影响,导致了不均匀沉降的发生,该矿区自行开展的沉降观测成果也证实了这一点。计算出累计沉降值后就可以判断沉降值否超限,从而做出相应的预警。
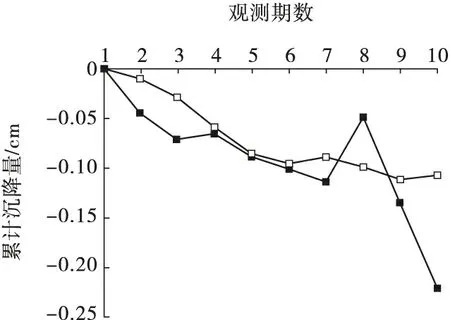
图4 2#监测点初始及差分小波去噪后的累计沉降曲线

图5 6#监测点初始及差分小波去噪后的累计沉降曲线
5 结 语
结合VB语言开发了TM30测量机器人自动化变形监测系统,该系统通过对监测数据首先进行差分处理,然后进行小波软阈值去噪,有助于提高监测数据的精度。该系统的不足之处在于缺乏数据后期平差功能,监测数据的平差处理需要结合其他相关软件进行。
[1] 张海丽,孙 昊,姚连壁.基于TCA2003测量机器人的滑坡变形监测系统开发与应用[J].大地测量与地球动力学,2012,32(1):152-155. Zhang Haili,Sun Hao,Yao Lianbi.Development and application of landslide deformation monitoring system based on measuring robot TCA2003[J].Journal of Geodesy and Geodynamics,2012,32(1):152-155.
[2] 崔有祯,李亚静.徕卡TM30 测量机器人三维测量在基坑边坡监测中的应用[J].测绘通报,2013(3):75-77. Cui Youzhen,Li Yajing.The application of arbitrary stations with 3D survey of geodetic robot in the running stability for slope monitoring of foundation pits[J].Bulletin of Surveying and Mapping,2013(3):75-77.
[3] 华前程,徐茂林,杨凤芸,等.基于TM30测量机器人边坡监测系统的研究[J].北京测绘,2014(4):60-62. Hua Qiancheng,Guo Maolin,Yang Fengyun,et al.Research on slope monitoring based on measuring robot TM30[J].Beijing Surveying and Mapping,2014(4):60-62.
[4] 孙华芬,侯克鹏.测量机器人自动检测系统在边坡远程监测中的应用[J].矿业研究与开发,2013,33(6):84-87. Sun Huafen,Hou Kepeng.Application of remote monitoring of slope based on measuring robot automatic detection system[J].Mining Research and Development,2013,33(6):84-87.
[5] 梅文胜,刘 涛.TS30/TM30测量机器人变形监测系统研究[J].测绘地理信息,2014,39(2):45-48. Mei Wensheng,Liu Tao.Research of deformation monitoring system based on measuring robot TS30/TM30[J].Journal of Geomatics,2014,39(2):45-48.
[6] 张汝捷,高 飞,高曼莉.自动化测量技术的研发与应用[J].信息通信,2013(7):43-44. Zhang Rujie,Gao Fei,Gao Manli.The development and application of automatic measurement technology[J].Information and Communications,2013(7):43-44.
[7] 张永毅,陈伟健,王子军,等.测量机器人观测系统的研究与开发[J].现代矿业,2014(4):45-48. Zhang Yongyi,Chen Weijian,Wang Zijun,et al.Research and development of observation system of measuring robot[J].Modern Mining,2014(4):45-48.
[8] 毛亚纯,王恩德,陈永生,等.利用GEOCOM开发测量机器人自动变形监测软件的有关问题及解决方法[J].金属矿山,2010(3):94-96. Mao Yachun,Wang Ende,Chen Yongsheng,et al.By using GEOCOM measuring robot automatic deformation monitoring software development related problems and solutions [J].Metal Mine,2010(3):94-96.
[9] 刘朋姣,侯东亚.徕卡 TM30 在罐体扫描检测中的开发及应用[J].测绘通报,2010(10):73-74. Liu Pengjiao,Hou Dongya.The development and application of scanning detection in tanks based on Leica TM30[J].Bulletin of Surveying and Mapping,2010(10):73-74.
[10] 崔有祯,郑佳荣,桂伟振,等.基于测量机器人技术的天伦监测应用研究[J].有色金属:矿山部分,2013,65(3):79-81. Cui Youzhen,Zheng Jiarong,Gui Weizhen,et al.Application research on Tianlun monitoring based on the technology of measuring robot [J].Nonferrous Metal:Mine Section,2013,65(3):79-81.
[11] 张正禄,沈飞飞,孔 宁,等.徕卡新型全站仪TS30的测评和开发研究[J].测绘信息与工程,2011,36(1):52-54. Zhang Zhenglu,Shen Feifei,Kong Ning,et al.Assessment and development of new type of total station Leica TS30[J].Journal of Surveying and Mapping Information and Engineering,2011,36(1):52-54.
(责任编辑 王小兵)
Development of the Deformation Monitoring System of TM30 Measuring Robot Based on VB
Jiang Chen Zhang Shubi(SchoolofEnvironmentScience&SpatialInformation,ChinaUniversityofMiningandTechnology,Xuzhou221116,China)
The automatic deformation monitoring system of TM30 measuring robot based on VB language is developed,and the composition and data serial communication mode and data acquisition mode of the system are analyzed in detail.In order to improve the accuracy of the observation data,the observation data processing methods are discussed.Firstly,the original observation data is conducted on differential treatment so as to weaken the effect of public errors,Secondly,the deformation data signals is conducted on 3 layers wavelet decomposition based on the wavelet analysis toolkit of MATLAB software,and the wavelet decomposition coefficients are processed by soft threshold to weaken the effect of noise.Performance of the deformation monitoring system is tested by adopting the actual deformation monitoring data of Huaibei mining area,the test results show that,the accuracy and stability of the monitoring data are improved based on the processing methods of differential treatment and wavelet denoising,so the method can provide some reference for dealing with the deformation monitoring data of mining area.
TM30 measuring robot,Deformation monitoring,Differential treatment,Wavelet denoising
2014-10-14
国家自然科学基金项目(编号:51174206),江苏省普通高校自然科学研究项目(编号:11KJD420002), 江苏高校优势学科建设工程资助项目(编号:PAPD SA1102)。
蒋 晨(1990—),男,硕士研究生。
TD178
A
1001-1250(2015)-01-104-04