考虑关键运动副特点的船用多功能数控机床模态分析
2015-03-17孙椰望张之敬张甲英徐滨士邓勇军
孙椰望, 金 鑫, 张之敬, 张甲英, 徐滨士, 邓勇军
(1. 北京理工大学 机械与车辆学院,北京 100081; 2. 装甲兵工程学院 装备再制造技术国防科技重点实验室,北京 100072)
考虑关键运动副特点的船用多功能数控机床模态分析
孙椰望1,2, 金 鑫1, 张之敬1, 张甲英2, 徐滨士2, 邓勇军1
(1. 北京理工大学 机械与车辆学院,北京 100081; 2. 装甲兵工程学院 装备再制造技术国防科技重点实验室,北京 100072)
针对船用多功能数控机床在舰船环境下的结构动态性能研究,结合舰船波浪载荷作用下的摇荡特点,揭示了机床的运动坐标体系和布局方案,并进行了机床关键导轨滑块运动副5自由度载荷特点的受力分析;依据机床振动理论构建了导轨滑块运动副粘性阻尼振动模型及其有限元结构模型;采用机床锤击试验模态和机床有限元结构模态相结合的方法验证了包含导轨滑块运动副粘性阻尼系统的有限元机床模型的适用性,并分析确定了机床110 Hz内的6阶模态振型及其频率。
船用多功能数控机床;试验模态;有限元分析法;粘性阻尼
随着国内舰船装备的快速发展,保障舰船长期正常的运行关系到舰船行业的重要经济与战略利益,设计制造船用多功能数控机床成为增强舰船装备快速保障能力的关键问题[1]。然而,除了能够实现所需多种零件的快速加工外,船用机床还需要具备海洋工作环境下的动态稳定性。特别是舰船行驶过程中时刻受到波浪载荷的冲击作用[2-3],船用机床的动态性能成为船用多功能数控机床动态稳定性研究的重要方面,其中机床模态分析成为动态性能研究的关键内容。
1 船用机床的波浪振动环境分析
船用多功能数控机床与其他机床最大的不同在于机床的舰船运行环境,船用机床不具备通用机床环境的优良地基,船用机床的环境直接关联于舰船的波浪振动特点。
舰船在波浪振动环境中,有6个自由度的摇荡运动特点:横摇、纵摇、艏摇、横荡、垂荡和纵荡,其中,横摇、纵摇和垂荡是主要摇荡形式;并且舰船的摇荡运动是相互耦合的运动形式[4-5]。由于舰船的结构对称性,6自由度的摇荡耦合运动分为纵向运动(包含垂荡、纵摇和纵荡)和横向运动(包含横荡、横摇和艏摇),而纵向和横向运动的耦合作用较小。舰船运行过程的研究表明横向运动直接关系到船舶的倾覆和航行安全[4-6]。因此,研究船用机床横向运动的动态特性成为船用机床耐波性分析的关键内容;同时,机床结构的模态特点成为机床动态特性研究的首要问题。
图1为船用多功能数控机床结构以及舰船环境下的运动坐标体系。机床运行环境存在3个主要坐标系:参考坐标系G-XYZ,运动坐标系G-uvw和固定坐标系o-xyz。当机床横向摇荡时,由于立柱的重量较大,Z2滑块导轨运动副负载较大,成为影响机床动态性能的主要部件。为了降低舰船横向运动对机床运行过程动态稳定性的影响,机床在舰船上布置时,舰船的横向运动应该与机床GZ方向成垂直状态。于是,Φ和θ分别成为机床的横摇角和机床立柱运行偏向角,并且与舰船横摇角和航向角一致。
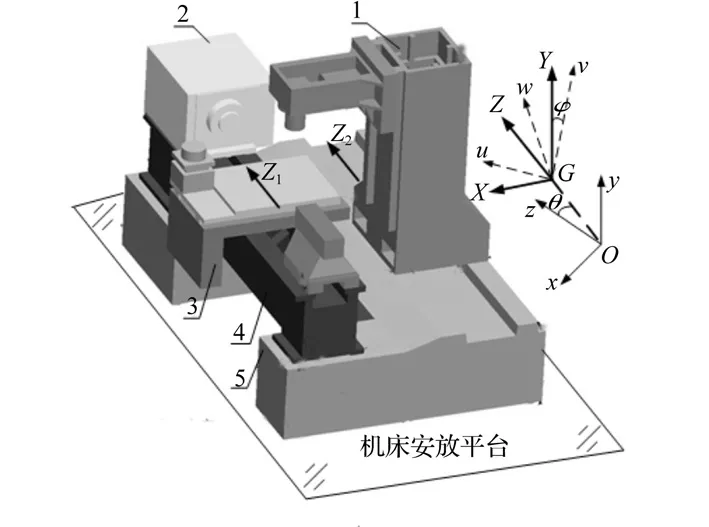
1立柱, 2床头箱, 3托板平台, 4床身, 5底座图1 船用多功能数控机床结构与运动体系Fig.1 Marine compound NC machine structure and motion coordinate
2 船用多功能数控机床立柱滑块导轨运动副受力分析与振动模型构建
2.1 滑块导轨运动副受力分析
图2为机床Z2运动方向的滑块导轨运动副结构[7],滑块与导轨之间通过上下4列滚动体相连接。根据船用机床的摇荡形式和滚动直线导轨结构可知船用机床滑块导轨副的受力情况如图3所示。
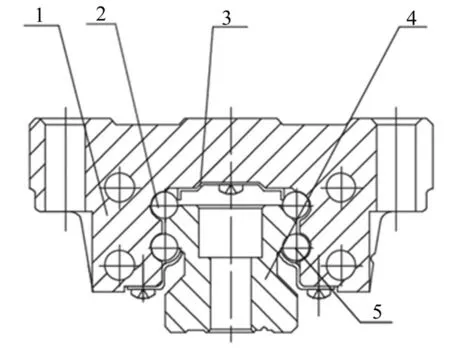
1滑块, 2上滚动体, 3保持架, 4导轨, 5下滚动体图2 滚动直线导轨结构图Fig.2 Rolling linear guideway structure
图3中,X向横向力FX主要为横荡激励的作用,横荡激励包括立柱传递的切削横向力和波浪横向载荷,该方向的载荷主要通过导轨滑块的上表面和两侧面的滚动体承载。Y向纵向力FY主要包括立柱的自重和机床摇荡过程的立柱Y向受力,该方向的载荷主要依靠滑块接触的导轨上表面滚动体和侧向滚动体承载。Z方向为滑块自由运动方向,同时该方向为图1所示机床进行铣削、铣车和立车加工的机床立柱Z2向进给方向。MX、MY、MZ分别为纵摇弯矩、艏摇弯矩和横摇弯矩,其中MX和MY主要为机床受到的波浪载荷作用效果,MZ包括机床立柱切削力弯矩和波浪载荷摇荡弯矩。

图3 船用机床滑块导轨运动中的受力分析Fig.3 Force analysis of the marine machine guide-slider motion
2.2 滑块导轨运动副振动模型构建
鉴于机床的舰船的振动环境和机床动态性能研究理论[8-10],构建导轨滑块运动副振动模型如图4所示。振动模型采用分散的单自由度系统逼近多自由度振动系统的方法;同时,根据图2和图3所示的滑块导轨的结构特点和受力情况,以滚动体位置为参考点,设滑块导轨副为粘性阻尼振动系统,分别在导轨与滑块接触边界位置分别采用相同的X和Y向弹簧刚度阻尼表达接触区的承载属性。其中,X向弹簧刚度阻尼主要承载图3所示机床的多功能切削加工时立柱产生的X向切削力和波浪横荡载荷;Y向弹簧刚度阻尼主要承载波浪垂荡载荷;X和Y向弹簧刚度阻尼耦合承载机床切削力弯矩和波浪摇荡弯矩。

图4 导轨与滑块结合部振动模型Fig.4 Guide-slider joint vibration model
图4中坐标G’-XYZ为模型的中心坐标系,A、B、C、D、E、F分别为图2中滚动体的位置;lAB=lCD为导轨HG45CA的宽度,m;lCE=lBF为滑块的长度,m;k1、k2分别为导轨滑块运动副X(横向)和Y(纵向)的弹簧刚度,N/m;c1、c2分别为导轨滑块运动副X和Y的阻尼系数,N·s/m
根据图3和图4得到结合部系统的振动微分方程:
(1)
式中:IX、IY、IZ分别为导轨纵摇、艏摇和横摇的转动惯量,kg·m2;γX、γY、γZ分别为导轨纵摇、艏摇和横摇的阻尼修正系数;m为单个滑块质量,kg;εX、εY分别为导轨滑块运动副横荡和垂荡位移,m;θX、θY、θZ分别为导轨滑块运动副的纵摇角,艏摇角和横摇角,rad。根据式(1)得到系统的传递函数方程组:
(2)
令式(2)等式右边的分母等于0,得到系统的特征方程组[8],求解系统的特征方程组得到系统的无阻尼振动固有圆频率为:
(3)
根据式(3)可知无阻尼振动系统的固有圆频率没有考虑振动系统的阻尼影响,并且具有显著的机床摇荡方向性特点。根据式(1)~(3)可知ω1和ω2分别表示机床导轨滑块副的横荡和垂荡固有圆频率;ω3~ω5分别表示机床导轨滑块副的纵摇、艏摇和横摇固有圆频率。但是机床导轨滑块系统具备阻尼抗振特点,所以设系统的粘性阻尼比为ζi,从而得到系统的粘性阻尼固有圆频率为:
(4)
3 基于滑块导轨副的船用多功能数控机床模态分析
含有滑块导轨副阻尼刚度的机床有限元结构模态分析需要根据机床试验模态的相关参数进行刚度和阻尼单元的参数计算和设置。因此机床试验模态分析对于机床动态特性研究起到关键作用。
3.1 机床试验模态分析
针对船用多功能数控机床,采用实验室所购买的东方所振动设备对机床进行锤击试验模态分析,试验平台如图5所示,试验结果见图6、图7和图8所示。

图5 机床锤击试验模态分析平台Fig.5 Machine hammering Experimental modal

图6 机床锤击试验模态的传递函数分析Fig.6 Analysis of Machine hammering experimental modal FRF
根据图6所示,机床试验模态的锤击输入信号与加速度振动输出信号相干系数在机床模态频率范围都为0.99左右,并且频率响应函数模态阶数明显,能够说明机床试验模态的输入和输出信号是合理的[11]。根据频率幅值和相位图可以判定该试验激起了所关心的机床模态。
图7为试验模态的数据拟合分析结果,分析过程采用了时域分析、频域分析以及基于留数矩阵的数值计算方法,结果表明三种数据分析方法相对误差较小,本次试验模态分析是合理的。根据试验模态拟合数据,结合模态振型确定模态阶数,分析结果如图8和表1所示。

图7 试验模态拟合结果分析Fig.7 Experimental modal calculation analysis

图8 船用多功能数控机床试验模态振型Fig.8 Experimental modal shapes of the machine tool
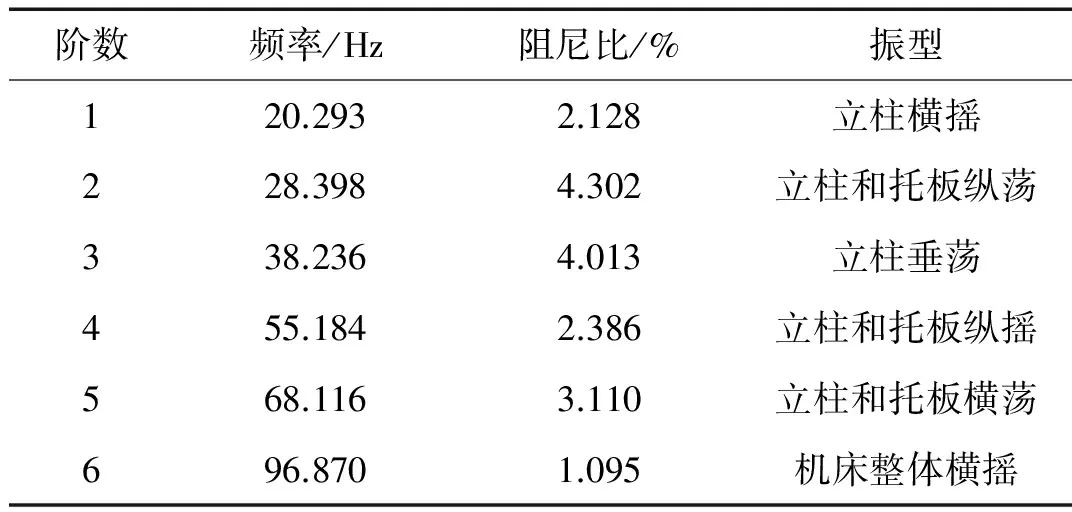
表1 船用多功能数控机床试验模态参数
3.2 机床有限元结构的模态分析
根据图1和图4所示构建导轨滑块运动副刚度阻尼的机床FEM模型(见图9)。
根据图8和表1参数计算滑块导轨运动副振动模型的c1、c2分别为582.032 N·s/m和421.58 N·s/m;k1、k2分别为4.0×106N/m和1.26×106N/m。从而得到机床有限元结构的模态分析结果为图10所示。
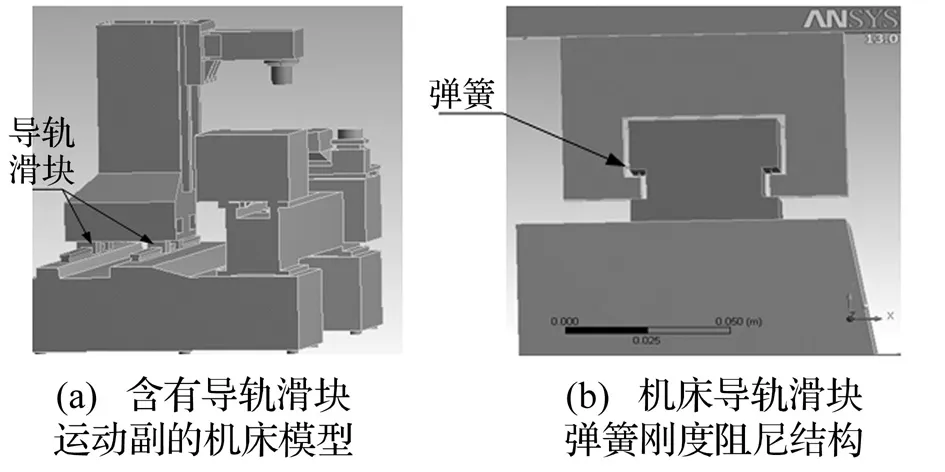
图9 含有导轨滑块运动副刚度阻尼的船用多功能机床FEM模型Fig.9 Machine FEM model including guide-slider viscous damping
根据试验模态分析和机床有限元结构模态分析结果可知,含有滑块导轨振动模型的机床有限元结构频率与试验模态频率相对误差小于10%,模态振型具备一致性。分析结果进一步验证了船用多功能数控机床关键滑块导轨运动副振动模型和机床FEM模型的适用性。同时,船用机床的试验模态分析是机床结构的固有振动特性研究,试验得到的模态数据不会随着机床的工作环境条件变化而改变[8-9,12]。因此,文章得到的机床模态数据能够反映机床在舰船环境下的固有动态特性,并能够为采用模态叠加法深入研究波浪载荷作用[13]下的机床动态响应奠定基础。
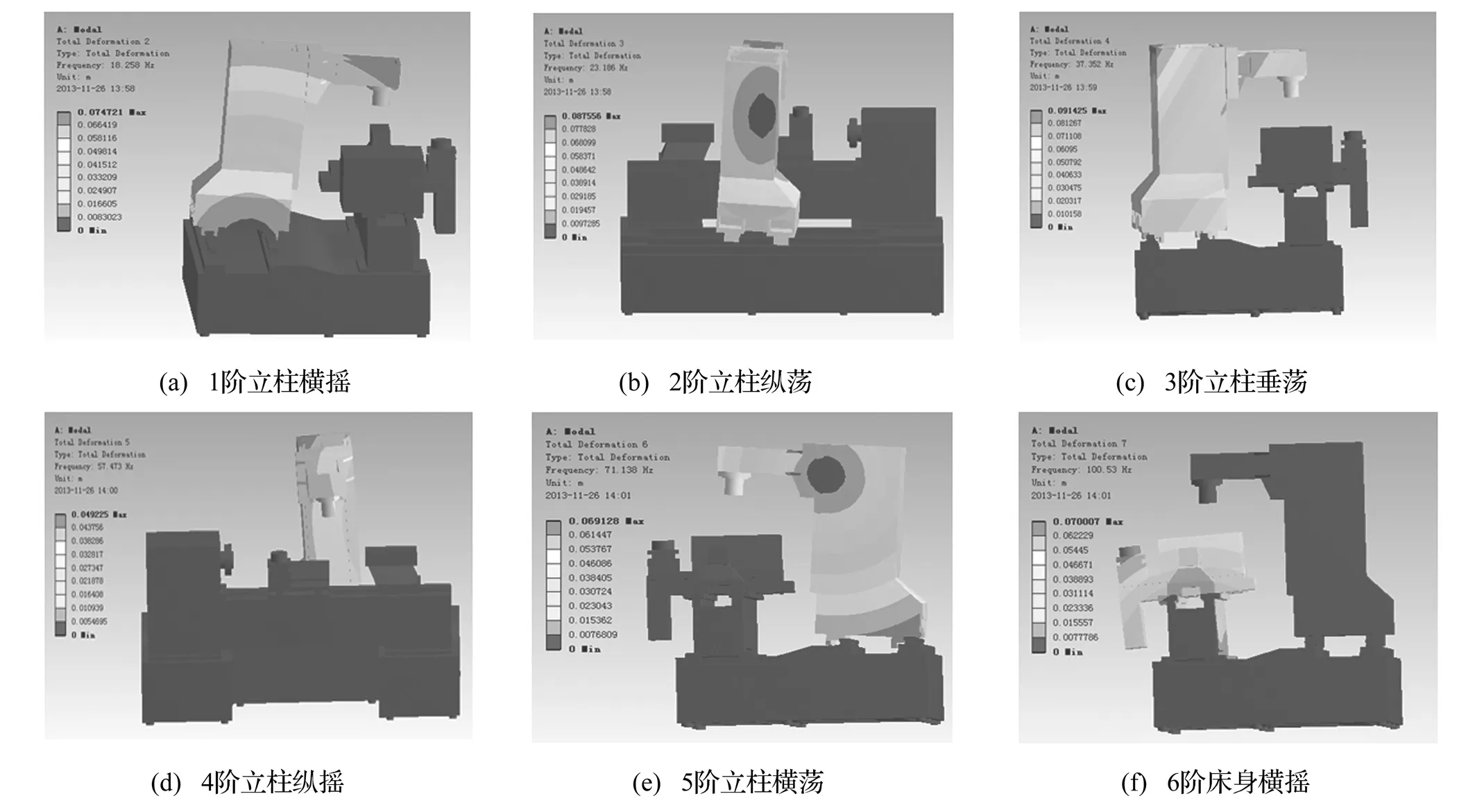
图10 含有导轨滑块运动副刚度阻尼的船用多功能机床有限元结构的模态分析结果Fig.10 Machine FEM structural modal results including guide-slider viscous damping
4 结 论
(1) 结合舰船波浪载荷作用下的摇荡特点,分析了船用多功能数控机床振动环境,并构建了机床的运动坐标体系。提出了机床立柱移动方向与船艏方向一致的布局方案,并分析确定了机床关键立柱导轨滑块运动副5自由度载荷特点。
(2) 基于机床立柱滑块导轨的结构特点和受力分析,构建了导轨滑块系统的粘性阻尼振动模型;并采用数值计算法得到了振动模型的弹簧刚度、阻尼和系统固有频率的数值计算方法。
(3) 基于导轨滑块运动副的振动模型构建了机床FEM模型,并采用机床试验模态法和机床有限元结构模态分析相结合的方法分析了船用多功能机床的前6阶模态参数。分析结果验证了机床关键滑块导轨运动副振动模型和机床FEM模型的适用性。
[1] 徐滨士.徐滨士院士教学、科研文选[M].北京:化学工业出版社,2010.
[2] Daniele D. Slammingclustering on fast ships: from impact dynamics to global response analysis [J]. Ocean Engineering, 2013, 62:110-122.
[3] 盛振邦,刘应中. 船舶原理[M].上海:上海交通大学出版社,2004.
[4] 邵开文, 马运义.舰船技术与设计概论[M].北京:国防工业出版社,2005.
[5] 李积德. 船舶耐波性[M].哈尔滨:哈尔滨工程大学出版社,2007.
[6] Junker J J. Stochastic procedures for extreme wave load predictions-wave bending moment in ships [J]. Marine Structures, 2009, 22: 194-198.
[7] HIWIN集团.线性滑轨技术手册[EB/OL]. www.hiwinlc.com.cn, 2013.
[8] 杨橚,唐恒龄,廖伯瑜. 机床动力学[M]. 北京: 机械工业出版社, 1983.
[9] 诸乃雄.机床动态设计原理与应用 [M].上海:同济大学出版社,1987.
[10] 刘称意. 考虑导轨结合面影响的数控机床动态特性分析及结构优化 [D].沈阳:东北大学, 2010.
[11] 应怀樵. 现代振动与噪声技术 [M]. 北京:航空工业出版社,2011.
[12] Michael Z Q, HU Y L, HUANG L X. Influence of inerter on natural frequencies of vibration systems [J]. Journal of Sound and Vibration, 2014, 333: 1874-1887.
[13] Li Y, Lin M. Regular and irregular wave impacts on floating body[J]. Ocean Engineering, 2012, 42:93-101.
Modal analysis of marine compound NC machine considering guide-slider motion character and viscous damping
SUN Ye-wang1,2, JIN Xin1, ZHANG Zhi-jing1, ZHANG Jia-ying2, XU Bin-shi2, DENG Yong-jun1
(1. School of Mechanical Engineering, Beijing Institute of Technology, Beijing 100081, China; 2. National Key Laboratory for Remanufacturing, Academy of Armored Forces Engineering, Beijing 100072, China)
To study the dynamic characteristics of marine compound NC machine, the machine motion coordinate system and the layout scheme were revealed based on the analysis of the ship sway characteristics under wave loads. The key guide-slider motion of the machine under a 5-DOF load was studied. Then, the guide-slider vibration model with viscous damping and a finite element (FE) structural model of the machine were created. The hammering modal tests and FE modal analysis were used to study its vibration modes. The results show that the guide-slider vibration model and the FE machine model are correct, and there are 6 modal shapes of the machine within 110 Hz.
marine compound NC machine; experimental modal; finite element method; viscous damping
国家科技重大专项资助项目(2012ZX04010-061);北京理工大学科技创新专项计划项目(3030012241303)
2013-12-17 修改稿收到日期:2014-05-20
孙椰望 男,博士生,1985年生
张之敬 男,教授,博士生导师,1951年生 金鑫 女,副教授,1971年生
TH112
A
10.13465/j.cnki.jvs.2015.09.006
