基于临界能量管理的着舰技术研究
2015-03-15孙洪波叶兵程亮亮曹青春
孙洪波, 叶兵, 程亮亮, 曹青春
(海军航空兵学院 舰载机系, 辽宁 葫芦岛 125001)
基于临界能量管理的着舰技术研究
孙洪波, 叶兵, 程亮亮, 曹青春
(海军航空兵学院 舰载机系, 辽宁 葫芦岛 125001)
以一种全新的视角,用能量管理来解释舰载机着舰,更加直接地分析舰载机的运动状态,并从能量管理的角度为着舰驾驶操作提供有益参考。结合舰载机着舰仿真数据,分析飞机油门、驾驶杆等控制量的输入对舰载机能量状态的影响,总结了规律性的着舰操纵方法,有助于飞行学员理解和掌握着舰理论,对其掌握舰载机的着舰驾驶技能有着积极的作用。
能量守恒; 能量转化; 舰载机; 着舰技术
0 引言
舰载机阻拦着舰是一项高风险、高增益的任务,即使有各种措施和设备辅助,仍比着陆风险大,是舰载机作业事故率最高的环节[1]。飞行员的操纵水平是舰载机安全着舰的主要依靠,对着舰技术的理解程度决定了飞行员的着舰水平。
舰载机着舰是一个等角下滑的过程[2],从能量方面考虑,也是一个舰载机的总能量相对于飞行甲板着舰点逐渐变小直至归零的过程。通过分析舰载机着舰过程中的能量变化,能够得出客观且易于理解的结论,有助于飞行员透彻把握着舰实质,掌握着舰操纵要领,提高训练效率。
1 舰载机着舰能量状态
舰载机着舰过程中的能量状态是持续变化的,有其特殊性,但也有规律可循。
1.1 临界能量状态
着舰飞行过程中,舰载机既有动能,又有势能,飞行速度决定动能,飞行高度决定势能,其总能量是动能和势能之和。正常飞行情况下,舰载机的总能量可以满足稳定飞行和空中机动需求,完成平台运载功能。着舰是舰载机减速、降高直至停在航母甲板上的过程,着舰完成意味着舰载机相对飞行甲板的动能归零,势能也归零,即总能量归零。
让舰载机的总能量归零,降低舰载机着舰起始点的初始能量是一个好的策略,实现总能量低起点可以从两个方面着手:一是降低舰载机的势能,即降低舰载机的着舰高度,从低起点开始着舰安全性更高;二是降低舰载机的动能,即降低舰载机的着舰速度,低速度着舰安全性更高。低高度有一个极限值,舰载机要安全飞过航母舰尾段,这决定了舰载机下滑道的基准角;低速也有一个极限,即空速不能小于舰载机的失速速度,这决定了舰载机要在反区飞行,如图1所示。
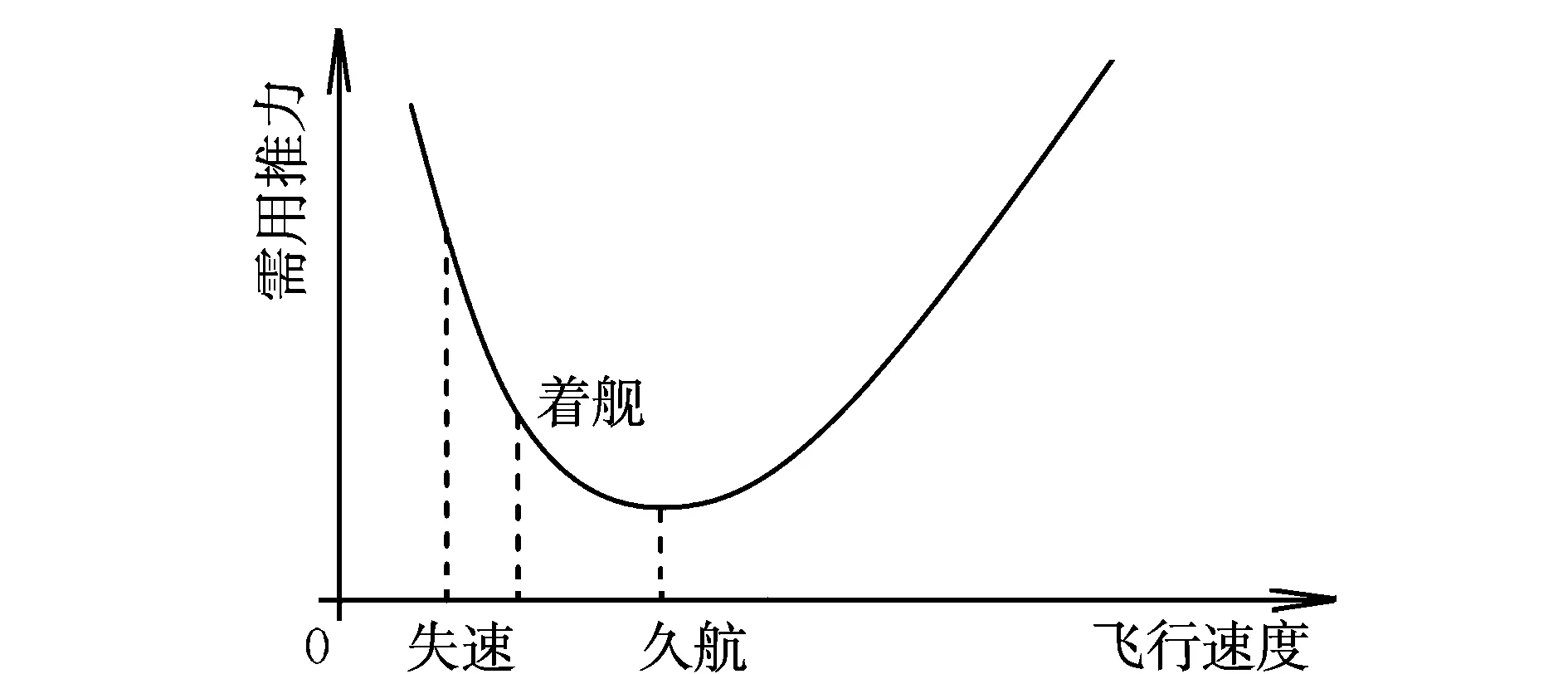
图1 飞机需用推力-速度关系图Fig.1 Aircraft requiring thrust-velocity relation
由图可知,在舰载机安全可控的前提下,要使舰载机速度比较小,则舰载机工作在反区为宜[3-4]。在保证失速安全裕度的情况下,舰载机飞行速度可以选取到低值,是理想的工作区间。着舰下滑飞行时,舰载机工作在临界迎角附近,动能较低,高度下降,势能降低。整个着舰过程,舰载机的总能量处在安全飞行的临界点上,故称其为临界能量状态。
1.2 能量状态变化
为了使采用阻拦方式着舰的舰载机在航母飞行甲板着舰区钩住阻拦索,通常在斜角甲板后部布设四道阻拦索,索间距约12 m,所以着舰区长度约为36 m。要使机身长接近20 m的舰载机准确降落在36 m的着舰区,舰载机采用了等角下滑的着舰技术,即舰载机在着舰的直线下滑段以固定的下滑角度,等速下滑直到触舰,其下滑角度一般在3.5°~4°,如图2所示。

图2 舰载机等角下滑示意图Fig.2 Carrier-based aircraft equiangular sliding angle
由图可知,在舰载机着舰下滑过程中,其总能量状态是逐渐减小的,具体地说是势能随高度的降低而减小,动能因保持等速飞行而不变。舰载机能量状态变化遵循“当前飞行点能量守恒、下滑过程能量稳定减小”的规律。所谓当前飞行点能量守恒指的是飞行员进行着舰操纵的当前时刻,在这一位置点上舰载机的总能量应保持临界状态,如果总能量过高,会增加着舰风险;如果总能量过低,飞机可能失控。为保证舰载机能够按要求着舰,其总能量必须是临界能量线上的一点,动能与势能的转化遵循能量守恒,如果动能低了,势能就要高一些;反过来,如果势能低了,动能就要高一些,这样的舰载机着舰过程才是一个良性可控状态。下滑过程能量稳定减小是指在整个着舰下滑过程中势能持续线性减小。
2 舰载机着舰飞行特点
总能量处于临界状态的舰载机,其飞行具有以下几个特点:
(1)强直运动
低能量平衡状态飞机的飞行速度低,需要靠近临界迎角来提高升力。处于这种状态的飞机,其姿态稳定性要求较高,所以舰载机的俯仰角和坡度角都不宜有大幅度的变化,为了保持这种临界稳定状态,舰载机的舵面也不应有大幅度的变化,处于这样一种临界状态的飞机只有保持强直状态,才能安全着舰。所谓强直状态是指舰载机的飞行以顺势飘动为主,而不宜剧烈机动。
(2)容易失速
舰载机在着舰航线上配平之后,空速接近最优空速,迎角靠近临界迎角。虽然已经配平,但飞机处于点稳定状态,此时飞机或飞行的任何一个参数发生变化,都可能使飞机掉高度或失速,而失速的可能性最大,危害也最大。
为了实现定点着舰,舰载机要调整航迹和姿态,在进行纵杆操纵调整飞机的俯仰时,会改变飞机的姿态角,造成飞机的迎角大于或小于最优迎角,而失去配平状态,发生危险;横杆操纵会使机翼翼尖迎角首先发生变化,飞行状态改变,进而可能导致飞机失速,无论哪种情况都可能带来灾难性的后果。
(3)下降快上升慢
理想情况下,舰载机着舰下滑是等速直线运动过程。此时,舰载机的升力与重力平衡,二者方向相反,大小相等。升力和重力的形成机理不同使二者对飞行员操控的响应迥异,气动升力的补偿有延迟,重力对飞机的作用始终存在,因此,重力对飞机航迹的影响更直接。升力和重力对飞机作用机理上的差异,使舰载机着舰过程中呈现出降低高度速度快、而上升高度速度慢的现象。
3 基于临界总能量管理的着舰操纵原则
处于临界总能量状态的舰载机有着特殊的操纵要求,符合要求的操纵输入才能使其保持在理想下滑道附近,顺利实现安全着舰。
3.1 总能量稳定变化
舰载机着舰过程是一个匀速直线运动,其总能量处于临界状态,舰载机的总能量一旦低于临界能量状态就可能掉高度或失速,意味着着舰失败;总能量若高于临界能量状态,舰载机就会大下滑角触舰或进入速度正区,着舰风险骤增。所以,在着舰过程中要对舰载机的能量进行必要的调整,标准是总能量状态要稳定,即舰载机的速度要处于优化的空速附近,着舰航迹要在理想下滑道上。对飞行员来说就是舰载机的空速或迎角在指定范围内,灯球在基准灯附近,飞行状态相对稳定。
3.2 油门控制总能量
着舰飞行的舰载机由于高度不断下降,其势能逐渐减小。由于速度不变,所以其动能基本稳定。发动机推力是舰载机唯一的能量输入,当舰载机的总能量变化时,可以进行能量补偿的只有发动机推力,也就是控制油门杆,使总能量保持在临界状态。
油门杆操作是慢周期响应,意味着发现偏差再进行修正时会出现能量补偿滞后的问题。要解决这一问题,要么消除补偿的传递延迟,但发动机工作机理决定了这是不可能做到的;要么小幅度高频率地使用油门,用发动机动态平均推力替代稳定油门推力,这是可以实现的。
3.3 驾驶杆控制能量转换
操纵飞机离不开驾驶杆,通过操纵飞机的舵面来调整飞机的气动力,改变姿态和航迹。纵向使用驾驶杆,能快速地实现舰载机动能和势能转换。拉杆会增加迎角和阻力,飞机的速度降低,高度增加,动能转化为势能;推杆会使飞机的迎角减小,阻力也减小,飞机的速度增加,高度降低,势能会转化为动能。横杆操纵会影响飞机的气动特性,造成升力下降而掉高度,势能降低,总能量下降。可见,驾驶杆不会补偿舰载机的总能量,只能改变舰载机动能和势能的分配。能量转换会有损失,即使用驾驶杆后,飞机的总能量也是减少的。
4 舰载机着舰复合偏差修正方法
舰载机着舰出现单一偏差时,按照上述原则操纵即可,但着舰过程中经常会出现复合偏差,其修正的难度更大。下面以几种典型的复合偏差修正为例予以说明。
(1)又高又快
判断:高说明势能大,快说明动能大。
结论:总能量高。
此时首先要减少总能量,即收油门杆减油,再通过驾驶杆调整当前飞行点动能和势能的分配(见图3)。图中:H为高度;D为距离;Vb为表速;Dz为纵杆位移;δT为油门杆位移。

图3 下滑道操纵曲线1Fig.3 Glide slope control curves 1
由图3可知,在整个着舰下滑过程中,飞机基本上都处在高于理想下滑道的位置,势能偏高,动能偏大。通过阴影标注部分,起始点都处于空速快的状态,因此飞机总能量较高,其后飞行员主要通过收油门进行修正,同时辅以杆的微调后,将飞机空速调整到正常的范围内,同时接近理想下滑道高度,回到正常的能量状态。这里需要强调,从图中可以看出,飞行员在操纵飞机着舰的过程中降高、减速的驾驶动作并不明显,但同时还应注意到飞行员带杆的动作非常频繁,所以说驾驶杆用来控制动能和势能的转换,而能量转换必然要造成能量损失,降低了飞机的总能量,所以飞机的轨迹依然逼近理想下滑道。
(2)又高又慢
判断:高说明势能大,慢说明动能小。
结论:总能量适中。
此时不用大幅度补偿总能量,油门杆保持稳定,调整驾驶杆,根据高和慢的具体情况,调整当前飞行点的动能和势能的分配(见图4)。由图4可知,在沿跑道距“着舰点”500 m以前的下滑过程中,飞机基本上都处在高于理想下滑道的位置,势能偏高。

图4 下滑道操纵曲线2Fig.4 Glide slope control curves 2
在第一个阴影标注部分,飞机空速开始低于正常要求,并呈减小趋势,飞行员主要通过杆的操作进行修正,油门基本稳定在一定的范围内;在第二个阴影标注部分,空速处于正常稍偏低的状态,并呈现变小的趋势,飞机总能量适中,在这一过程中也主要是通过杆的控制进行调整,油门在开始稍加一点再收回后基本保持稳定,飞机空速调整到正常范围后,同时处于理想下滑道高度,回到正常的能量状态。
(3)又低又快
判断:低说明势能小,快说明动能大。
结论:总能量适中。
此时不用大幅度补偿总能量,油门杆保持稳定,调整驾驶杆,根据高和慢的具体情况,调整当前飞行点的动能和势能的分配(见图5)。由图5可知,在沿跑道距“着舰点”300 m以前的下滑过程中,飞机基本上处在低于理想下滑道的位置,势能稍偏低。
在图中两个阴影标注部分,飞机空速开始都高于正常要求,在此过程中飞行员主要通过杆的操作进行修正,油门基本稳定在一定的范围内,保持飞机总能量适中,飞机空速调整到正常范围后,也基本处于理想下滑道高度上,回到正常的能量状态。

图5 下滑道操纵曲线3Fig.5 Glide slope control curves 3
(4)又低又慢
判断:低说明势能小,慢说明动能小。
结论:总能量低。
此时首先要增大总能量,即推油门杆加油,再调整驾驶杆,调整当前飞行点的动能和势能的分配(见图6)。由图6可知,在沿跑道距“着舰点”300 m以前的下滑过程中,飞机基本上处在低于理想下滑道的位置,势能稍偏低。
图中阴影标注部分,飞机空速开始呈减小趋势,总体能量状态偏低。在此过程中飞行员主要通过增加油门进行修正,同时稳定杆位在一定范围,补充飞机总能量到正常状态,之后在沿跑道距“着舰点”700 m左右的位置回到理想下滑道高度上。


图6 下滑道操纵曲线4Fig.6 Glide slope control curves 4
5 结束语
本文从临界总能量管理的角度解析舰载机着舰问题,深入浅出、易于把握,能给舰载机飞行员理解着舰原理、掌握驾驶技能提供有益帮助。舰载机飞行员着舰飞行必须遵循能量变化的规律,而操纵方法的选择,可以根据偏差类型、出现时机和个人的操作习惯进行具体分析来确定。
[1] U.S.Navy Landing Signal Officers School.Landing signal officers reference manual[M].Virginia:Naval Air Station Oceana,1999.
[2] 海军装备部飞机办公室.国外舰载机技术发展[M].第1版.北京:航空工业出版社,2008:52.
[3] 陈彩辉,周荣坤,吴红兵,等.基于机舰协同的舰载机着舰过程分析[J].电脑与信息技术,2010,18(4):8-10.
[4] 王延刚,屈香菊.舰载机进舰着舰过程仿真建模[J].系统仿真学报,2008,20(24):6592-6594,6598.
(编辑:方春玲)
Research on landing technique based on critical energy management
SUN Hong-bo, YE Bing, CHENG Liang-liang, CAO Qing-chun
(Carrier-based Aircraft Department, Naval Aviation Institute, Huludao 125001, China)
This paper explains the landing of carrier-based aircraft based on energy management in a new perspective,analyzes the motion state directly and provide helpful reference for landing from the point view of energy management. By combining with the simulation data of landing,the influence of throttle and stick control on energy state of the carrier aircraft is analyzed,and the regular landing techniques are summarized,which are useful for flying cadets to understand the landing theories,play an active role in mastering the landing skills on the carrier.
energy conservation; energy transformation; carrier-based aircraft; landing technique
2014-12-05;
2015-04-13;
时间:2015-06-24 15:03
孙洪波(1972-),男,吉林梅河口人,副教授,博士研究生,研究方向为舰载机飞行。
V271.4
A
1002-0853(2015)05-0451-05
