基于证据理论和多核函数融合的目标跟踪
2015-03-15费树岷周大可
杨 欣 沈 雷 费树岷 周大可
(1南京航空航天大学自动化学院,南京210016)
(2东南大学自动化学院,南京210096)
随着计算机视觉技术的蓬勃发展,利用计算机视觉技术对图像和视频进行处理、理解、分析得到广泛的普及.其中运动目标跟踪是一个热点研究问题[1].因 Mean-Shift(均值偏移)算法简单易行,对目标变形和局部遮挡有一定适应性而被广泛地研究与应用[2].传统的 Mean-Shift跟踪算法[3-4]是以颜色直方图为特征对运动目标进行跟踪,对于复杂背景情况下的跟踪效果不佳.文献[4]中颜色直方图只包含了图像中颜色值出现的频数,仅反映了目标的颜色信息.
基于上述讨论,本文给出了一种新颖的基于证据理论和多核函数融合的目标跟踪方法.该方法首先对目标区域进行颜色和边缘特征的融合;然后将此区域分成4个子区域,算出子区域的颜色与边缘方向直方图融合的联合概率密度,并计算出各个区域的巴氏权重系数;再根据加权后的联合概率密度,采用多个核函数计算出多个目标位置估计;最后利用D-S证据理论信息融合方法[5]对多个目标位置估计进行融合判断获得准确的目标位置.实验结果表明,该方法在目标被大面积长时间遮挡的情况下,能达到良好的跟踪效果.
1 目标模型
1.1 目标模型建立
基于颜色直方图的方法[6]简单灵活,但目标区域有光照变化时,会造成目标丢失,因此本文融合边缘方向直方图,利用边缘特征信息来有效应对光照变化,进而对目标区域进行分块处理,以提高目标的辨识能力.
1)分块处理 当目标被遮挡时,被遮挡部分的直方图会有明显的改变,所以被遮挡的部分应赋予较小的权值.将目标框等分成4份,以便于更好地区分各个部分被遮挡的情况,分块方法如图1所示.
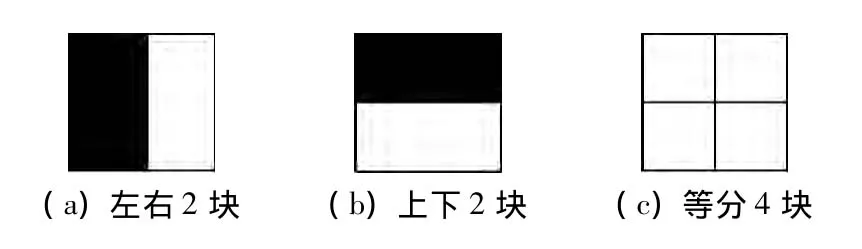
图1 目标框分块示意图
2)颜色直方图 颜色直方图是一种较为实用的区域颜色建模方法.对于一个半径为R的特定区域,在建立颜色分布模型时,不同位置像素对于颜色直方图的贡献不同,距离目标中心近的被赋予较大权值,远的被赋予较小权值,其颜色直方图模型的计算公式见文献[7].
3)边缘方向直方图 边缘方向直方图是对运动目标的边缘点方向分布的一种统计,首先将其划分为8个方向,再将目标分成4块进行运算.这样可包含目标的轮廓信息,从而对遮挡情况具有良好的抑制作用.模型见文献[8].
1.2 目标遮挡对巴氏系数的影响
当目标被遮挡时,遮挡区域的直方图有很大变化,而未被遮挡区域的直方图变化较小.图2表示目标下半部被汽车遮挡,表1为图2中不同的分块位置被汽车遮挡后对巴氏系数的影响.
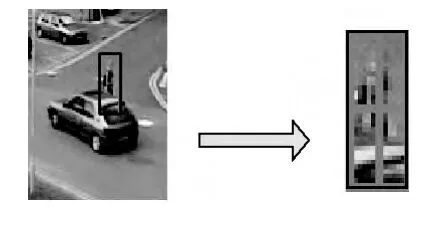
图2 被遮挡目标图像

表1 每个分块对巴氏系数的影响
由表1可知,目标跟踪框下半部分的相似性系数非常小,这说明跟踪目标下半部被遮挡后,对跟踪的影响较大,而遮挡上半部分的影响较小.因此,基于未遮挡区域的巴氏系数进行目标跟踪,能有效提高目标跟踪的鲁棒性.
2 直方图特征融合
2.1 融合概率密度计算
根据颜色模型,采用下式求出图像像素点的颜色概率估计值:
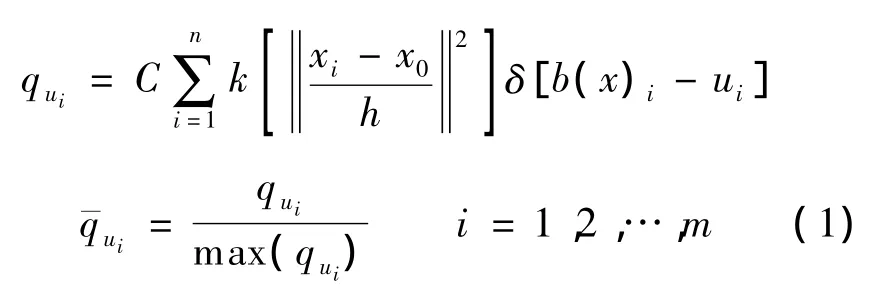
通过Sobel算子检测出的边缘二值图像包含了目标的边缘特征空间信息,同时联合上述像素点的估计值,可以获得边缘特征与颜色特征相联合的像素点概率估计值,即
式中,g(x,y)是利用Sobel算子进行边缘检测后坐标(x,y)处的值,存在边缘时为1,否则为0.
2.2 子块加权系数
考虑光照、形变和遮挡等情况的影响,巴氏系数大的分块,权重系数大;反之,权重系数小.记各块的权值系数为w(k),即

3 基于证据理论的目标位置估计
3.1 证据理论
根据证据理论[9]方法构建数学模型,采用N个不同的核函数,分别利用Mean-Shift方法,获得当前目标跟踪框中N个不同的位置估计(l1,l2,…,ln),令l'为前一帧中的目标位置.基于D-S证据理论中焦元结构定义的方法[10],定义一组 mass函数,即
利用式(5)构造的信任函数,再采用D-S组合公式计算得到目标位于ln的概率:
3.2 遮挡程度的判定规则
本文主要针对跟踪目标的大面积长时间遮挡情况.当目标被遮挡,可视面积将发生变化,巴氏系数也会发生相应的改变,利用这一特性可以判断目标被遮挡的程度.定义遮挡判断因子为

4 算法
根据上述分析,给出目标跟踪算法步骤如下:
①手动选择目标的初始位置并用红色框表示,初始化当前帧中目标位置为^y0,将目标跟踪区域等分成4个子区域.
②根据文献[6]中公式分别求解出4块原目标模型特征直方图qu和候选目标模型特征直方图qu(y).
③采用式(3)计算出每个子分块的权值系数.
④计算目标新位置y1:
式中,wi为权值系数.
⑤计算候选目标联合直方图 {pk(y1)},k=1,2,3,4,同时计算

⑥通过判定规则,对遮挡情况进行判定.如果大面积遮挡,执行⑦;否则,先利用单个核函数进行迭代跟踪目标位置,然后转到⑨.
⑦对已经计算出的多组目标位置,采用基于D-S证据理论信息融合方法,对多组目标位置进行融合判断,得到最佳的目标位置,结果记为
5 实验结果与分析
采用传统Mean-Shift算法和本文算法进行对比实验.图3(a)是传统Mean-Shift算法目标跟踪结果.由图可知,当目标未进入遮挡区域时可以较好地跟踪上运动目标;但跟踪到第50帧左右时,目标大部分面积被遮挡,在长时间遮挡过程中,目标跟踪区域始终出现抖动滞后现象.图3(b)为本文所提出的目标跟踪算法跟踪的效果,从图中可以看出,跟踪效果有明显的提高,在整个遮挡过程中,可以很好地跟踪上原目标.
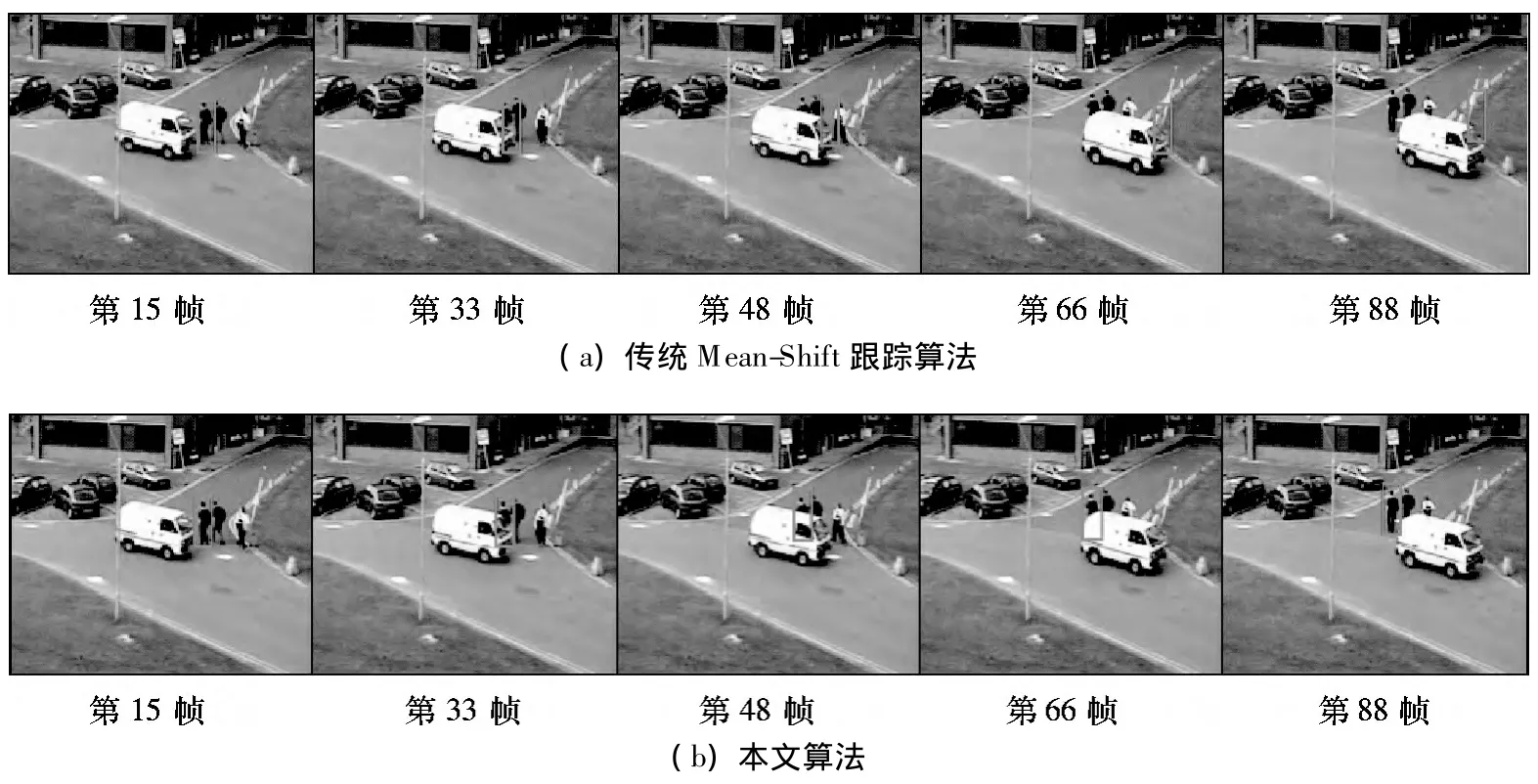
图3 视频1跟踪效果
6 结语
针对长时间大面积遮挡情况下的目标跟踪问题,本文提出了基于证据理论和多核函数融合的目标跟踪方法,较好地解决了目标部分遮挡问题.而当目标被全部遮挡时,目标的特征信息无法获取,对目标实时跟踪带来严重的影响,下一步作者将着重解决该问题.
References)
[1] 杨欣,刘加,周鹏宇,等.基于多特征融合的粒子滤波自适应目标跟踪算法[J].吉林大学学报:工学版,2015,45(2):533-539.Yang Xin,Liu Jia,Zhou Pengyu,et al.Adaptive particle filter for object tracking based on fusing multiple features[J].Journal of Jilin University:Engineering and Technology Edition,2015,45(2):533-539.(in Chinese)
[2] Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2003,25(5):564-577.
[3] 杨欣,费树岷,李刚,等.基于复杂特征融合的改进Mean Shift目标跟踪[J].控制与决策,2014,29(7):1297-1300.Yang Xin,Fei Shumin,Li Gang,et al.Improved Mean Shift tracking algorithm based on complicated feature fusion[J].Control and Decision,2014,29(7):1297-1300.(in Chinese)
[4] 何志勇,蔡乐才,许继家.基于 Mean Shift算法跟踪视频中运动目标[J].郑州大学学报:理学版,2010,42(1):38-40.He Zhiyong,Cai Lecai,Xu Jija.Tracking moving objects based on Mean Shift algorithm in video[J].Journal of Zhengzhou University:Natural Science Edition,2010,42(1):38-40.(in Chinese)
[5] 易建政,汪金军,张俊坤,等.DS证据理论在信息融合中的应用研究[J].国外电子测量技术,2010(12):31-34.Yi Jianzheng,Wang Jinjun,Zhang Junkun,et al.Application research on D-S evidence theory in data fusion[J]. Foreign ElectronicMeasurement Technology,2010(12):31-34.(in Chinese)
[6] Comaniciu D,Meer P.Mean shift:a robust approach toward feature space analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(5):603-619.
[7] 刘惟锦,章毓晋.基于Kalman滤波和边缘直方图的实时目标跟踪[J].清华大学学报:自然科学版,2008,48(7):1104-1107.Liu Weijin,Zhang Yujin.Edge-color-histogram and Kalman filter-based real-time object tracking[J].Journal of Tsinghua University:Science and Technology,2008,48(7):1104-1107.(in Chinese)
[8] Pylkko H,Riekki J,Roning J.Real-time color-based tracking via a marker interface[C]//IEEE International Conference on Robotics and Automation.Seoul,Korea,2001,2:1214-1219.
[9] Gao L P,Jia J,Dong L B.An improved fusion algorithm of evidence theory[C]//Conference on Cross Strait Quad-Regional Radio Science and Wireless Technology.Harbin,China,2011,2:1495-1498.
[10] Li Y B,Wang N,Zhou C.Based on D-S evidence theory of information fusion improved method[C]//International Conference on Computer Application and System Modeling.Taiyuan,China,2010,1:416-419.