五轴联动数控加工后置处理研究
2015-03-15范清华
范清华
(中航工业新航集团,河南 新乡 453049)
五轴联动数控加工后置处理研究
范清华
(中航工业新航集团,河南 新乡 453049)
摘要:五轴联动数控加工中心是应涡轮、复杂叶型等透平零件的整体机械加工的需求而诞生的,它加工精度高,尺寸一致性好,成品率高,材质均匀,在航空、航天、船舶和制氧制氮等行业应用广泛。近年来,各类企业大规模购进五轴联动数控加工中心,五轴联动加工程序的编制成为制约其应用的关键因素。目前,五轴联动编程都是采用CAM软件自动生成,了解掌握CAM软件针对不同机床结构的后置处理算法,对编程员提高编程效率,理解编程原理有重要意义。了解CAM软件如何经后置处理程序编译生成G代码,首先应了解APT语言中的GOTO指令,然后利用坐标旋转或矩阵变换即可弄清如何将I/J/K转化为坐标轴的旋转角度,如何将X/Y/Z转化为刀心点的坐标。
关键词:五轴联动数控加工;双转台;后置处理;坐标变换;APT
1五轴联动加工编程综述
五轴联动数控加工中心自诞生以来,一直广泛应用于航空、航天、船舶和制氧制氮行业等透平叶轮、叶片的制造领域。如何提高编程效率是拥有五轴设备厂家普遍关心的问题,由于叶轮、叶片多为空间曲面的连续加工,手工编程计算量十分巨大,所以目前这类零件的编程基本都靠CAM软件来实现。每一种CAM软件针对不同的机床结构输出不同的加工代码,编程时应结合机床实际情况对加工代码的后置处理程序进行设置,这样才能得到可用的G代码程序。本文对后置处理计算的一般过程进行了研究讨论,以使编程员了解五轴后置处理算法。
很多CAM软件生成G代码的同时,都会生成一个过渡文件——刀位文件。虽然扩展名可能不同,但都可以用文本编辑器打开,它们都是APT格式的文本文件,里面包含程序开头、结尾、刀具、转速转向、刀具运动、冷却液开关、主轴启动和停止等信息,是固定的格式化语句,可以被后置处理程序翻译为数控设备能识别的G代码。
本文只讨论刀具运动定义语句GOTO/多轴联动数据处理,其语法结构为:GOTO/x,y,z,i,j,k。其中x,y,z表示刀心点在编程坐标系中的空间位置,i,j,k表示单位刀轴矢量在编程坐标轴X、Y、Z方向上的投影。如:GOTO/3.513659,0.378589,0.022664,-0.11791,0.973647,-0.195215,其中,3.513 659,0.378 589,0.022 664指刀具编程点(一般为刀具中心点)在工件坐标系的位置(变换计算时应注意公英制的差异),-0.117 91,0.973 647,-0.195 215为刀轴矢量在X、Y、Z这3个直线轴上的单位投影。在编程过程中,虽然采取刀具移动而工件不动的原则,但实际上有很多机床在设计时采取工件移动和转动来实现多轴联动加工。-0.117 91,0.973 647,-0.195 215这3个数值用来计算旋转轴的角度,可以计算出任意2个旋转轴的转角。五轴编程大多数情况下是采用2个转动轴来实现加工点的刀轴方向,这与编程点的刀轴方向是一致的。在这3个数都不为0的情况下,任意2个转轴发生转动后,需要对刀心点3.513 659,0.378 589,0.022 664进行重新计算,以确保刀心点位置正确。五轴联动后置处理运算实际就是计算旋转轴转角,并计算因旋转而导致的刀心点位置变化。
2哈默UWF902H五轴联动加工中心
本文结合中航工业新航集团哈默UWF902H五轴联动加工中心的结构特点,以一段直纹曲面涡轮单边叶片粗加工程序为例,说明五轴联动后置处理的计算过程(见图1)。UWF902H是双转台卧式五轴联动加工中心,其主轴在Y轴方向,旋转轴为C轴和A轴,旋转中心平行各自直线轴。C轴转角为-135°~+45°,A轴转角为n×360°,A轴置于C轴之上,C轴转动会带来A轴旋转轴线的改变。这些特征直接影响旋转之后刀心点位置各个方向坐标计算的先后顺序、转角取值范围。
图1 五轴联动后置处理的计算过程示意图
3后置处理算法及验证

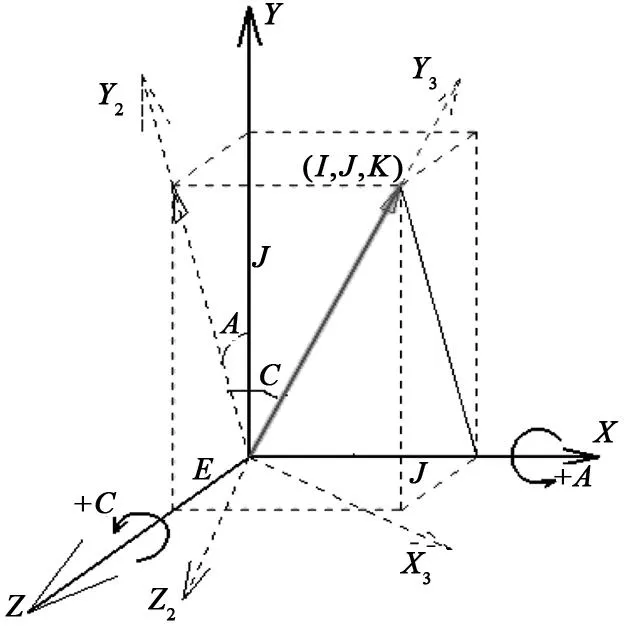
图2 旋转角度换算图
A轴转动后,刀心点应重新计算以保证其在工件坐标系中的位置不发生改变。刀心点坐标换算图如图3所示。从图3可以看出,P点在转动轴转动角度A之后的坐标为:
Y2=Y1cosA-Z1sinA
Z2=Z1cosA+Y1sinA
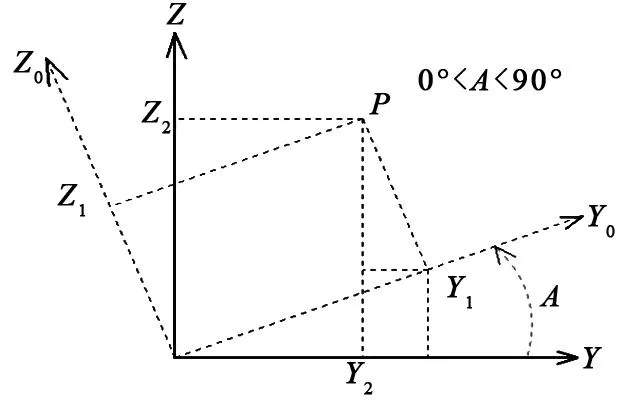
图3 刀心点坐标换算图
由于是在YOZ平面内转动,所以X坐标不变,X2=X1。
由于2个转轴都发生转动,所以在XOY平面内,C轴转动后需再次计算工件坐标系中刀心点的位置。根据上述计算方法,可得:
X3=X2cosC-Y2sinC
Y3=Y2cosA+X2sinA
Z3=Z2
按此方法计算本文示例点,得到:X=89.722 750 13,Y=-1.272 739 078,Z=2.454 837 945,A=-11.337 406 66,C=6.771 497 549 247 17。与CAM软件自动生成程序对应点的程序G01 X89.723Y-1.273Z2.455A-11.337C6.771一致。细微差别来自计算精度的差距。通过应用Excel软件编程计算其余各点,得到与CAM软件自动生成一致的计算结果。
另外,还可以以矩阵变换求解[1]。
1)编程坐标系与工件坐标系的变换矩阵为:
2)C轴旋转角度C的变换矩阵为:
3)A轴旋转角度A的变换矩阵为:
那么:
(X3Y3Z31)=(X1Y1Z1d)T1T2T3
展开后可得:
X3=X1cosC+Y1sinC
Y3=-X1sinCcosA+Y1cosCcosA+Z1sinA+dsinA
Z3=X1sinCsinA+Y1cosCcosA+Z1cosA+dcosA
4结语
五轴联动数控加工程序编制的关键是弄清旋转轴之间的配置关系,A轴与C轴组合、B轴与C轴组合、A轴与B轴组合编程的实质是一样的,具体要看机床的实际结构。本文介绍的是A轴与C轴组合的卧式机床,按照上述方法便可以推导出其他双转台机床的后置处理算法。
参考文献
[1] 全荣. 五坐标联动数控技术[M]. 长沙:湖南科学技术出版社,1995.
[2] 庞继伟. 五轴数控铣削加工后置处理及加工编程研究[D]. 济南:山东大学,2007.
责任编辑郑练
The Research on Post Processing of Five Axis NC Machining
FAN Qinghua
(AVIC Xinxiang Aviation Industry (Group) Co., Ltd., Xinxiang 453049, China)
Abstract:The five-axis CNC machining center is created because of a turbine, complex leaf and other turbine parts of the overall machine. It has high machining precision, good uniformity in size, the rate of finished products is high and uniform material has been widely used in oxygen and nitrogen industry application of aerospace and marine. In recent years, enterprises of all types of large-scale technical transformation purchases five-axis CNC machining center, five axis linkage processing procedures for the preparation of become key limiting factors, five-axis programming is using CAM software to automatically generate and understand the cam according to the different structure of the machine tool post processing method of programmer. It improves programming efficiency, so understand programming theory has important significance. Understand how the CAM software compiled to generate G code, need to understand the APT language GOTO. Then the coordinate rotation and matrix transformation can figure out how I/J/K transforms to the coordinate axis of rotation angle and how X/Y/Z gets into the tip of point coordinates.
Key words:five axis CNC machining, dual turret, post processing, coordinate transformation, APT
收稿日期:2015-06-23
作者简介:范清华(1976-),男,副总经理,工程师,大学本科,主要从事数控加工编程、编程技巧以及数控加工操作、维修技术工人培养、培训等方面的研究。
中图分类号:TP 391.7
文献标志码:A
