临场感遥操作机器人系统中的虚拟动力学检测算法
2015-03-15刘永浩
刘永浩,王 鹏,王 霞
(西安工业大学 体育学院,陕西 西安 710032)
临场感遥操作机器人系统中的虚拟动力学检测算法
刘永浩,王鹏,王霞
(西安工业大学 体育学院,陕西 西安 710032)
摘要:分析了临场感遥操作机器人系统组成及工作原理,并以虚拟力以接触性碰撞动力学检测为例,提出了FV接触式中虚拟力的检测算法。该算法考虑了惯性、阻尼系数及弹性系数,并指出虚拟交互力是FV接触式中虚拟力的矢量和。选取临场感遥操作机器人系统对该算法进行了验证,分析了物体的位移及作用力的大小。试验结果表明,虚拟力fspan和主手力fspan、从手力fspan基本一致,该算法的精确度较高,并且具有可行性。
关键词:临场感遥操作机器人;虚拟动力学检测算法;虚拟力
随着海洋技术、原子能技术及空间技术的不断发展,人类经常会遇到一些极端的工作的环境,如高温、窒息、强辐射和高压等,而遥操作机器人[1]能够替代人类直接在这种环境中工作,因而,其研究成为热点。目前,对于遥操作机器人的研究,日本、前苏联和美国等也取得了一系列的研究成果[2-3]。利用临场感遥操作机器人系统,可以实现交互工作方式,使操作者感知现场工作情况,提高系统的工作性能。
随着科学技术的发展,将遥操作机器人和临场感技术结合在一起,以原有遥操作机器人系统为基础,引入视觉反馈和力反馈,形成双向控制遥操作系统,充分发挥人和机器人的特长。机器人和人实现交互工作,人的决策能力和判断能力可以提高系统的智能水平,使遥操作机器人能够更好地完成极端环境之下的操作任务;但是引入力与视觉反馈易导致出现系统的时延及各种扰动误差,从而降低了反馈信号的实时性和真实性。随着计算机图形学及相关技术的快速发展,虚拟现实技术被应用到遥操作机器人系统中,逐渐成为解决时延问题的主要手段之一。本文主要分析临场感遥操作机器人系统中的虚拟动力学检测算法。
1临场感遥操作机器人系统组成及工作原理
1.1组成
临场感遥操作机器人系统主要分为机器人操作端及机器人执行端两部分(见图1),具体包括异构主从机械手部分、视觉临场感子系统、双向伺服控制子系统及网络通信子系统等4个部分。
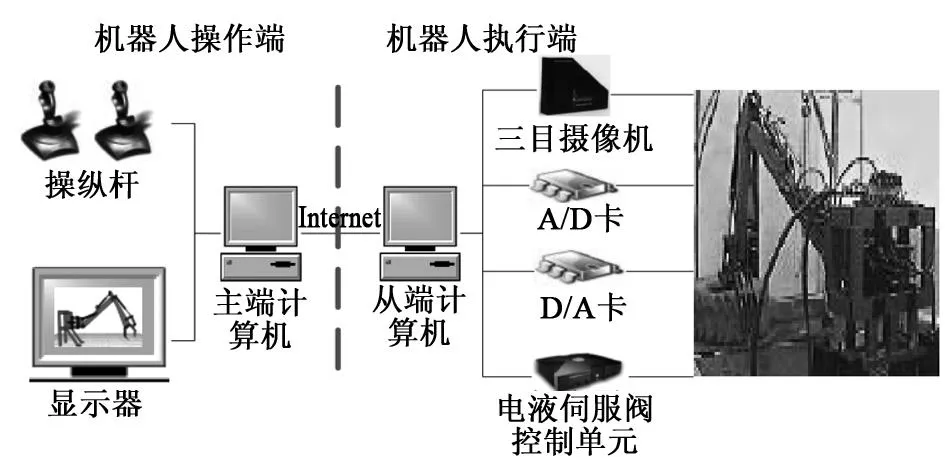
图1 临场感遥操作机器人系统组成
1.2工作原理
现场操作人员通过力反馈操作对机器人的工作进行现场指导,机器人上安装了位移传感器、摄像机、工作阻力及测量机械手抓取力。视频系统通过无线通信模块获得工作现场的图像并传输到监视器屏幕上,为操作者提供视觉反馈。通过对反馈力的操作,可以对工作阻力及被抓取物体的软硬程度做出判断。该遥控机器人系统具备主动臂和从动臂双向力反应,操作者直接对主动臂进行操作,从动臂跟随主动臂的操作完成一系列的操作任务,通过从动臂的约束反力的实时回传,使操作者对从动臂有真实的力感觉,从而可以使操作更加精细。
2虚拟环境中的交互动力学检测
2.1接触性碰撞动力学检测算法
本系统的虚拟机械手接触性碰撞检测主要包括2个步骤:1)对立体包围盒相交进行测试,看虚拟手与环境是否发生碰撞,如果两包围盒交集为空,则一定不会发生碰撞现象;2)如果确定碰撞之后,则对虚拟手多边形和环境多面体之间的碰撞进行精确检测。进行碰撞检测时,判定待操作对象是否被抓住或者产生位移的主要依据是虚拟手的运动方向和包围盒的接触面;此外,机械手抓取物体或者是划过物体的过程中,一定会有物体沿着受力的方向发生移动。接触判定的空间范围如图2所示。
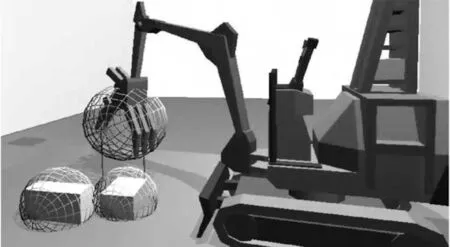
图2 接触判定的空间范围
在图形仿真中,如果图形机械手内侧抓取物体接触时,物体的相应移动是通过抓手指尖与待操作对象各表面的关系来实现。图形机械手接触物体时,为了判定虚拟物体是否受力,是否出现虚拟移动,通常会采用一组平面来近似抓手的外缘轮廓,对抓手外缘面与待操作对象各表面的碰撞关系进行判断。这一精确碰撞检测是建立在抓手和物体的包围盒碰撞检测的基础上的,它的实现过程是首先进行抓手外缘的每个面与物体包围盒的碰撞检测,然后对发生碰撞的外缘面与物体的每个相应的表面进行精确的接触检测。抓取过程属于面—顶点接触式,即FV接触式。
当虚拟手抓取物体和物体接触时,假定被抓取的物体的惯性质量为ijkmve,阻尼系数为ijkbve,弹性系数为ijkkve,在机械手抓取物体时,物体会以接触点为原点发生位移,接触表面的法向矢量为zi。


图3 FV接触模式作用力的侧视图
若将zt变换到模型世界坐标系中的变形矢量,则在发生FV接触并仅考虑变形矢量rvelt时,某一物体受到的相互作用力矢量FVfvei可表达为:
(1)
式中,ijkmve代表3×3惯性质量矩阵;ijkbve代表阻尼系数矩阵;ijkkve代表弹性系数矩阵,可用式2表示:
(2)
式中,I为3×3单位矩阵。
2.2接触式碰撞中虚拟动力学合成检测算法

(3)
式中,n为接触状态下包含FV基本接触的数目。

图4 物体受力图

(4)
在同时考虑变形矢量rveli,rvelj和位移rve2的情况下,该物体受到的总力矢量为:
(5)
(6)

(7)
则式6为:
(8)
3试验分析
试验系统的主端和从端位于2个不同的实验室中,其两端计算机之间的网络通信通过局域网TCP/IP协议实现,传输的信息包括反馈信息和控制信息,每组控制信息的字节数为16 kb,每组反馈信息的字节数为20 kb,由于时延的累积是毫秒级的,因此,对操作速度的影响不大。选择的试验系统其硬件设备组成结构如图5所示。

图5 试验系统硬件组成
试验中被抓取的物体质量、阻尼系数和弹性系数分别为m=0.37 kg,k=1 223 N/m,b=325 N·s/m。试验结果分别如图6~图8所示。随着机械手的运动,机械手和被碰撞物体的受力情况也随着发生改变,系统检测到的虚拟力fv和主手力fm、从手力fs基本一致,说明所给出的检测算法是可行的。
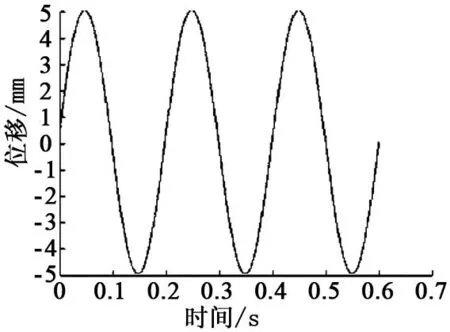
图6 机械手运动位移
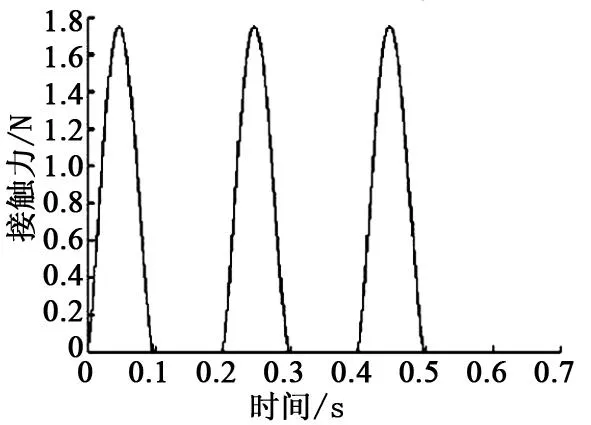
图7 机械手与环境碰撞接触力

图8 物体受力情况分析
4结语
在遥操作机器人中引入视觉临场感技术之后,这一领域的研究进入了一个新时代。由于机械手在抓取物体时存在虚拟力,因此,对虚拟力进行研究,可以提高机械手抓取物体的精确性。本文提出的虚拟力检测算法,对于人机接口的设计具有非常重要的参考价值,使该系统向着更加智能化、极限化及完整化的方向发展。
参考文献
[1] 宋爱国,柯欣,潘礼正.力觉临场感遥操作机器人(2):操作者的输入输出特性建模[J].南京信息工程大学学报:自然科学版, 2013(2):97-105.
[2] 朱猛.基于虚拟现实的临场感遥操作工程机器人系统研究[D].长春:吉林大学,2008.
[3] 宋爱国,倪得晶.力觉临场感遥操作机器人(4):系统的操作性能评价[J].南京信息工程大学学报:自然科学版, 2014(3):211-220.
责任编辑郑练
The Virtual Dynamics Detection Algorithm of Teleoperation Robot System
LIU Yonghao, WANG Peng, WANG Xia
(School of Physical Education, Xi’an Technological University, Xi’an 710032, China)
Abstract:Analyze the teleoperation robotic system components and working principle, and take the virtual force to contact the collision dynamics detection as an example, propose a virtual force FV-contact detection algorithm which takes into account inertia, damping and elasticity. The virtual interaction FV contact force is the vector sum of the virtual force. Finally select teleoperation robot system to verify the algorithm to analyze the size of the displacement and the force of objects. The results show that virtual force fspan, master hand power fspanand consistent from practicing hand fspanare about the same, and the algorithm is feasible in high accuracy.
Key words:teleoperation robot, virtual dynamics detection algorithm, virtual force
收稿日期:2015-08-21
作者简介:刘永浩(1977-),男,硕士,讲师,主要从事体育工程学、体育教学与训练等方面的研究。
中图分类号:TP 242.2
文献标志码:A
