基于ADAMS的“挑战者之旅”游艺机脚架动力学分析与优化
2015-03-14黄知洋
张 斌 黄知洋
(温州南方游乐设备工程有限公司,浙江 温州325005)
0 引言
随着经济建设的快速发展,人们生活水平不断提高,对游乐场活动的需求也越来越旺盛。在游乐场里,大型游乐设施“挑战者之旅”是人们最喜爱的项目之一,保证其安全性显得尤为重要。因此,对“挑战者之旅”游艺机进行仿真分析很有必要,仿真出的主要数据可为进一步优化设计提供帮助。传统设计大多还是采用解析法,通过建立机构的数学模型,然后根据设计要求对模型进行优化。这种方法计算量大而复杂,且精度不高。ADAMS作为虚拟样机分析的应用软件,可以方便精确地对各种机械系统进行建模和优化设计。
图1所示为简化的“挑战者之旅”游艺机脚架和摆动机构。
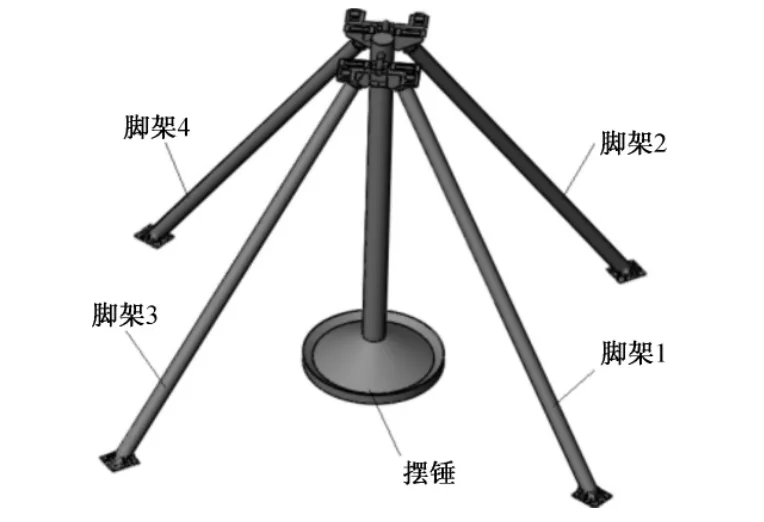
图1 挑战者之旅游艺机简图
4根脚架1、2、3、4固定在地面,支承摆锤等摆动机构摆动,脚架的位置分别对称于摆锤垂直平面,摆锤在脚架1、2(脚架3、4)之间的中垂面内摆动。
1 “挑战者之旅”游艺机脚架参数化建模
1.1 理论分析
本文只分析在摆锤不断提升过程中脚架支座反力的变化。对摆动机构做了简化,简化后的摆锤重量为m1,4根脚架的总重量为m2,摆动角度为±120°;摆锤摆动半径为L;摆锤质心距离摆动中心为R;脚架1、2(脚架3、4)跨度为l。
摆动机构运行于高点时,摆锤速度为0,离心力为0,随着摆锤下落速度加大,离心力变大。此时求得摆锤处离心力为:

摆动机构的重力可分解为一个沿大臂轴向的分力和沿摆动切向线速度的力,此部分中对设备有效的载荷为沿摆臂轴向的分力:

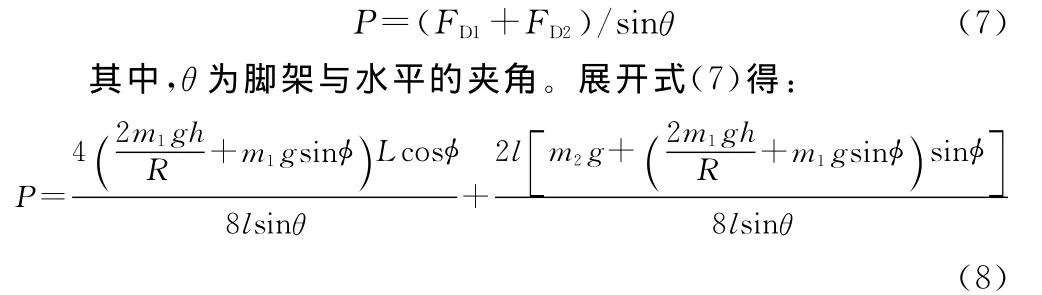
式中,ø为摆锤中心线与水平的夹角。
以上2个力的载荷均通过摆臂的传递作用于转动中心,故可将其分解为水平方向的力及竖直方向的力:

水平方向的力及竖直方向的力对支点的倾翻矩所产生的力为:
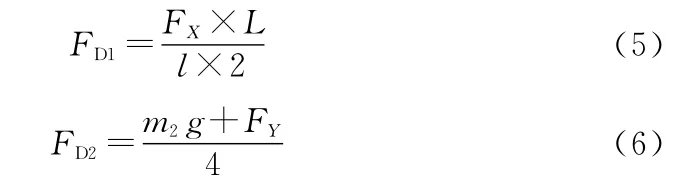
综上,求得每个脚架的支座反力P为:
根据设备运行需要,摆锤穿过脚架1、2(脚架3、4)时,脚架间的距离必须大于摆锤的直径。所以本文不考虑脚架1、2(脚架3、4)之间的距离,将其设定为固定值。只考虑脚架1、3(脚架2、4)之间的距离变化对脚架支座反力曲线的影响。
综上,将“挑战者之旅”游艺机的数据参数代入式(8),并通过Matlab绘制得到脚架支座反力理论曲线,如图2、图3所示。

图2 脚架 1(2)支座反力
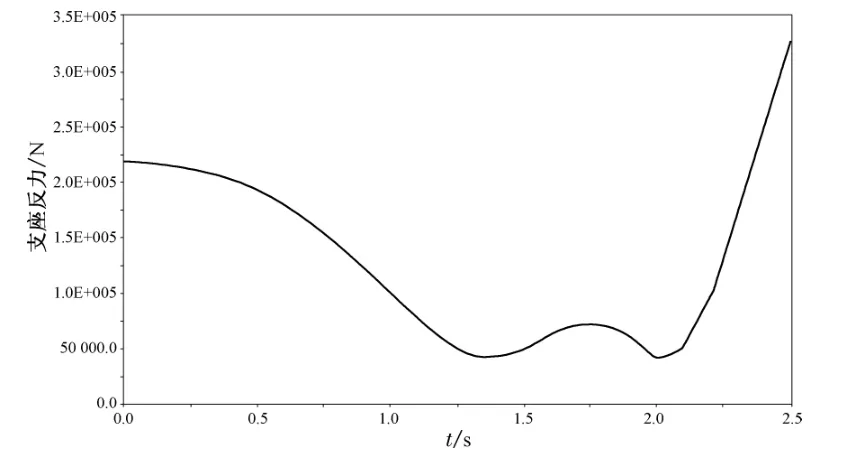
图3 脚架 3(4)支座反力
1.2 创建设计变量
首先,建立整个机构的直角坐标系,获得坐标原点。在ADAMS中创建脚架位置的变量,变量范围为±100%和±25%,使其在设计中可以进行参数变化,进而分析在不同位置时脚架的支座反力。变量设计如表1所示。
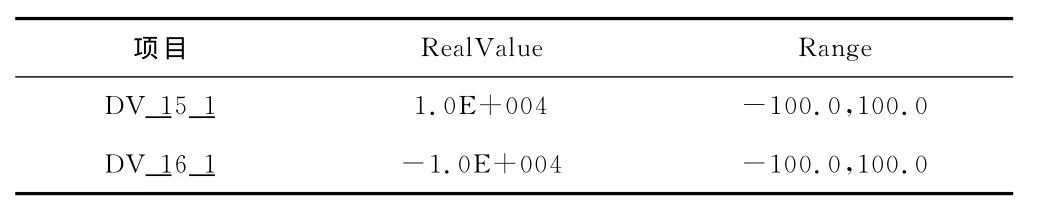
表1 设计变量表(±100%)
1.3 参数化建模
ADAMS具有强大的参数化建模功能,可帮助设计者分析设计参数变化对样机性能的影响。试验设计和优化分析分别可以提供多个设计变量,分析它们发生变化对样机性能的影响,获得在给定的设计变量变化范围内,设计目标达到最大或最小值的工况。对脚架与地面的连接点进行参数化设计,各参数点坐标如表2所示。
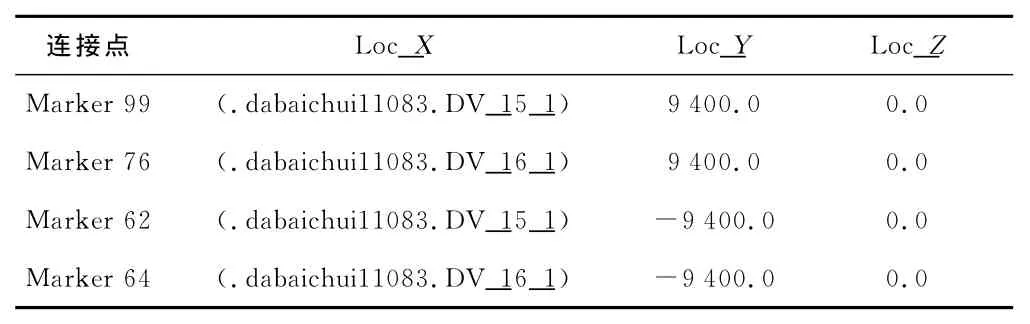
表2 参数化坐标
根据参数化的点创建模型的各个构件,添加各个构件的质量和质量中心,设置相互之间的约束关系,在摆臂上添加扭矩。虚拟样机模型如图4所示。
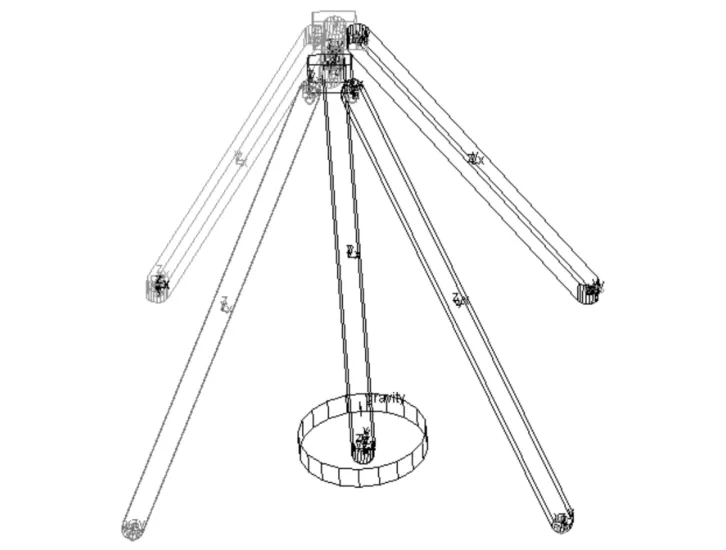
图4 “挑战者之旅”游艺机虚拟样机模型
1.4 理论模型与虚拟样机模型比较
通过建立的虚拟样机模型在2.5s内仿真完成1/4摆动周期的变化,绘制脚架1(2)的支座反力,如图5中的Trial_1线(实)所示;绘制脚架3(4)的支座反力,如图6中的 Trial_1线(实)所示。同时将理论模型在Matlab中计算得到的数值导入ADAMS,绘制相应脚架理论支座反力数据曲线Trial_2线(虚),比较2条曲线,曲线变化状况基本一致。
2 “挑战者之旅”游艺机脚架优化设计
2.1 创建测量函数
分别创建4个脚架的支座反力测量函数。
2.2 创建约束函数
由于在仿真中已经设计了仿真的动态过程,所以将仿真的结束设置为约束条件。
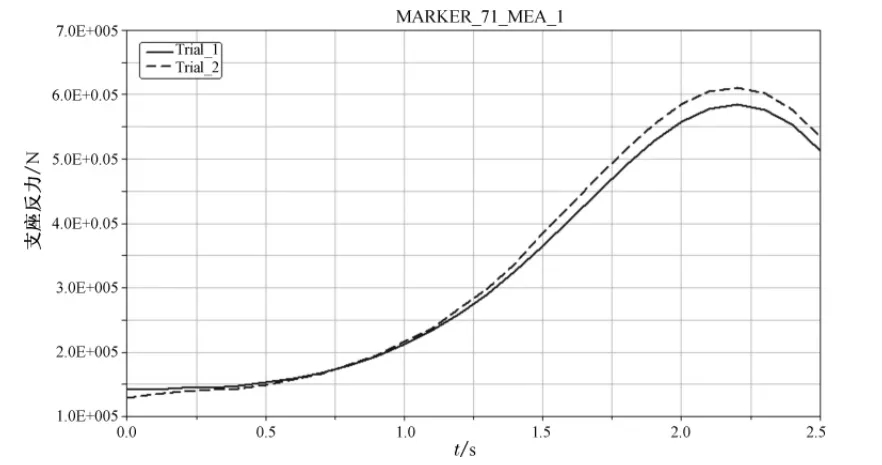
图5 脚架 1(2)支座反力

图6 脚架 3(4)支座反力
2.3 建立目标函数
在“挑战者之旅”游艺机运行的时候,希望4个脚架受到的支座反力最小,以此为目标,建立目标函数。优化目标:

2.4 优化计算
通过试验设计,综合不同的设计变量得到了脚架1(2)承受的支座反力(图7)和脚架3(4)承受的支座反力(图8)。从图7可以看出脚架1(2)在Trial_3时得到的支座反力最小,此时脚架1(2)垂直竖立,脚架3(4)处在设置范围的最远端。从图8可以看出脚架3(4)在Trial_7时得到的支座反力最小,此时脚架3(4)垂直竖立,脚架1(2)处在设置范围的最远端。由于不能同时取到脚架之间承受的最小支座反力,所以取单侧2个脚架的支座反力总和为目标。
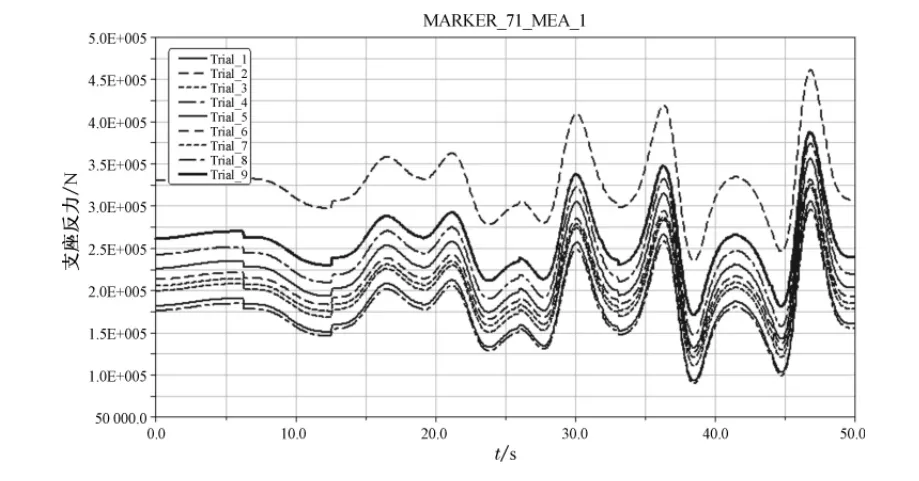
图7 脚架 1(2)承受的支座反力

图8 脚架 3(4)承受的支座反力
首先对脚架所在位置±100%范围内进行位置变化,并进行了36次试验,在图9中绘制了每次试验得到的总支座反力值(实线),总支座反力趋势(虚线)在第10~20次之间相对较小,故在此范围内进行进一步分析。
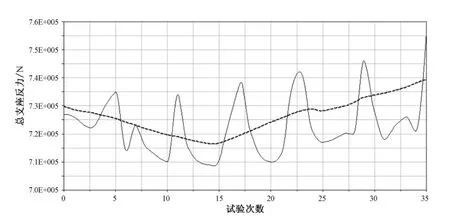
图9 每次试验的总支座反力值及反力趋势
在上述第10~20次试验之间,对脚架所在位置±25%范围内进行位置变化。通过试验,在图10中绘制了每一次试验得到的总支座反力值。从图中可以看出,脚架在第8次试验时承受的总支座反力值最小,此时2脚架所夹角度为54.9°。
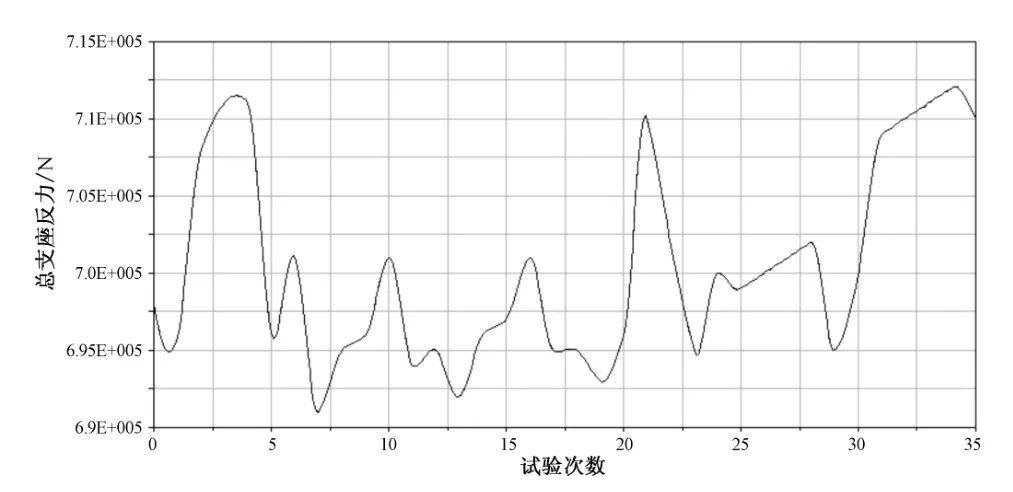
图10 每次试验的总支座反力值
3 结语
本文对“挑战者之旅”游艺机设计中ADAMS的应用进行了有益尝试,采用ADAMS软件建立了游艺机的参数化模型,通过对多个设计变量的设计研究,获得脚架位置对脚架支座反力变化的影响情况,根据设计研究结果确定优化设计变量,获得较优的脚架位置数值,得到脚架支座反力的最优解。在优化位置,脚架承受的支座反力为6.91×105N,比优化前承受的支座反力减少10%左右。
本研究表明,基于ADAMS的参数化分析有利于了解各设计变量对样机性能的影响。针对影响最大的变量进行优化设计,能提高“挑战者之旅”游艺机的设计速度和质量,为改进设备提供相关参数与设计依据。
[1]李军,邢俊文,覃文洁.ADAMS实例操作教程[M].北京:北京理工大学出版社,2002
[2]赵匀.机构数值分析与综合[M].北京:机械工业出版社,2005
[3]陈卫平,张云清,任卫群,等.机械系统动力学分析与ADAMS应用教程[M].北京:清华大学出版社,2005