高压气吹除对潜艇动力抗沉影响分析研究*
2015-03-14刘常波黄海峰
刘常波 刘 蓁 黄海峰
(1.海军潜艇学院作战指挥系 青岛 266042)(2.海军潜艇学院研究生队 青岛 266042)
高压气吹除对潜艇动力抗沉影响分析研究*
刘常波1刘 蓁2黄海峰1
(1.海军潜艇学院作战指挥系 青岛 266042)(2.海军潜艇学院研究生队 青岛 266042)
针对当前潜艇利用高压气进行动力抗沉缺乏定量分析,高压气吹除对潜艇影响认识不足的问题,采用计算机模拟仿真方法,仿真分析了吹除不同主压载水舱对潜艇纵倾与潜浮率的影响及挽回效果,结果表明,潜浮率过大将难以控制潜艇以稳定纵倾平稳上浮,在此基础上给出不同舱室进水的吹除建议。
潜艇; 高压气; 动力抗沉
Class Number U674.76
1 引言
高压气吹除主压载水舱是潜艇动力抗沉的主要抗沉措施之一,在发生舱室进水、大纵倾等危险事故时,需要及时采取高压气供气措施,然而,高压气供气控制至今没有有效的依据,为了使潜艇在吹除过程中能保证潜艇成功挽回而常常供气过多,导致不容易控制潜艇,以至于使潜艇上浮至危险深度,甚至不合时宜的浮出水面。本文利用计算机进行仿真分析高压气吹除对潜艇纵倾和潜浮率的影响,以及高压气吹除各主压载水舱时潜艇纵倾和潜浮率变化特点,给出不同舱室进水的合理吹除建议。
2 高压气控制规律理论分析
2.1 高压气控制量
潜艇动力抗沉过程中对高压气的控制要素主要包括:吹除主压载水舱的选择、供气与停止供气的时机。高压气吹除主压载水舱的方式分两种:应急吹除和短路吹除[1]。其中应急吹除是将潜艇的所有主压载水舱分成首组、中组、尾组三组,在吹除主压载水舱时,以分组为单位进行吹除,这种吹除方式高压气吹除率不高,主压载水舱排水速度慢;短路吹除是各组高压气通过电液吹除球阀直接进入主压载水舱,而不经过吹除阀柱和总管,路线比应急吹除要短很多,因而高压气吹除率大,排水相对较快,相应的高压气消耗量也较大。
2.2 高压气控制因素
动力抗沉的目的是潜艇平稳的上浮至水面或安全深度[2],通过分析潜艇垂直面的运动方程可知,潜浮率和纵倾是潜艇上浮过程中两个最关键的控制要素[3]。对纵倾而言,在吹除主压载水舱时,选择合理的吹除次序,保持适当的纵倾,形成有利于抗沉的姿态。而潜浮率反映了潜艇垂直面的受力情况,能表征潜艇上浮下潜的趋势大小。通过高压气吹除主压载水舱,辅以其他动力抗沉措施来控制潜艇以稳定、合适的潜浮率和纵倾角,保证潜艇以较好的纵倾和一定潜浮率上浮或定深。
3 应急操纵仿真模型
3.1 潜艇空间运动模型
本文以1967年美国泰勒海军舰船研究与发展中心(DTNSRDC)发表的潜艇六自由度空间运动方程作为操纵运动的基本数学模型[4]。
3.2 舱室进水模型
本文认为舱室进水形式为自由进水,因此,根据伯努利方程得到了破口进水速率的表达式[5]:
利用电子化程序直接到医生工作站抓取信息,简单易行,能有效提高监测效率,具有较好的推广性及可行性,鉴此可实现从哨点监测到全覆盖监测的转化。目前,上述思路已具备技术层面的实施条件,只需在医疗机构和疾控部门各自的信息平台进行微调和系统对接即可实现。笔者所在的单位前期在多家医疗机构开展调研,目前已在部分医疗机构进行试点。
(1)
式中,Qin为进水速率,m3/s;μ为破口进水滞留系数,取0.6;S为破口面积,m2;g为重力加速度,m/s2;h为破口深度,m。
3.3 高压气吹除模型
本文采用如下主压载水舱供气吹除数学模型[6]:
(2)
式中:m为气瓶中的空气质量,kg;ω(t)为空气质量流量,kg/s;Tt和Tk分别为高压气瓶中和压载水舱内的气体温度,K;K为绝热指数;Vk为水舱气体的体积即排出水的体积,m3;μ为通海阀流量系数(同破口进水滞留系数),取0.6;A为通海阀流通面积,m2;Pk为水舱内气体的压力,Pa;PB为通海阀处海水背压,Pa;r为海水比重,t/m3;F(h)为主压载水舱面积函数,m2;R为理想气体常数,J/kg·K;g为重力加速度,m/s2;h为压载水舱内海水高度,m。
4 高压气控制规律仿真分析
在动力抗沉过程中,造成尾倾是抗沉的关键运动状态,一般中部及首部舱室进水,可取尾倾7°~10°或更大些,尾部舱室进水,取尾倾为3°~5°。挽回操纵措施一般为:首、中部进水,首舵操上浮满舵,用尾舵保持一定尾倾上浮;尾部进水,尾舵操下潜舵或下潜满舵,用首舵保持尾倾上浮[7]。
4.1 不同尾倾上浮的挽回效果仿真分析
在动力抗沉过程中,利用高压气与升降舵使潜艇以一定尾倾上浮,可获得较大的艇体承载力,从该意义上说,尾倾越大,抗沉效果越好[8]。仿真条件:潜艇初始状态为无纵倾定深直航状态,速度6kn,舵角0°,初始深度100m,t=10s时Ⅰ舱进水,破损口直径10cm,抗沉过程中持续进水;进水20s后[9],采取以下抗沉措施:升降舵操上浮舵,用高压气吹除1号主压载水舱,增速至14kn;控制目标:上浮至安全深度50m。

图1 以不同尾倾上浮的深度仿真曲线
图1为尾倾角分别为3°、5°、8°、10°、12°、15°时潜艇上浮的深度变化曲线。由图可知,尾倾小于8°时,潜艇无法上浮至预定深度;尾倾大于10°时,潜艇能够上浮至预定深度,且随着尾倾增大,上浮至指定深度时间越短,说明尾倾越大,潜艇获得的浮力越大,深度变化率越大;另外,10°与12°尾倾潜浮率基本一致,上浮的最小深度与要求的安全深度相差不到10 m。
在上述相同破损条件下,控制潜浮率分别为-1.0m/s和-0.5m/s,自动操舵装置的指令纵倾角分别设定为5°、8°和10°,潜艇上浮深度与预定深度相差5m时停止高压气吹除。仿真结果如图2、图3所示。


图2 潜浮率为-0.5m/s的深度和纵倾变化曲线


图3 潜浮率为-1.0m/s的深度和纵倾变化曲线
由图2、图3可知,在Ⅰ舱进水事故下,吹除1号主压载水舱对潜艇纵倾和潜浮率影响都很大,图2(a)、图3(a)深度变化曲线可以看出,整个挽回过程都是平稳上浮状态。其中潜浮率为-1.0m/s时,挽回至指定深度50m的时间要短,但是其纵倾角波动较大,无法以稳定的指定纵倾角上浮。而采用-0.5m/s潜浮率挽回时,所需时间虽较前者多30s,但其纵倾角波动较小,曲线变化平缓。由此可见,在动力抗沉时若吹除时间太长,潜浮率过大,将不利于潜艇的纵倾控制,不利于潜艇稳定上浮。
4.3 吹除不同主压载水舱纵倾和潜浮率影响仿真分析
各主压载水舱相对潜艇重心的距离不同,因此吹除不同主压载水舱时,潜艇深度和纵倾变化必然不同。若吹除首、尾组主压载水舱,产生的力矩较大,纵倾更容易改变;若吹除中组主压载水舱,则产生的力矩较小,由于主压载水舱接近潜艇重心,可更容易改变潜浮率[10]。图4~图6为潜艇初始速度6节、深度100m,在潜艇没有损失浮力情况下,高压气分别吹除首、中、尾组主压载水舱时,其深度、潜浮率及纵倾仿真曲线,其中,开始吹除时刻t=10s,吹除持续时间T=10s。
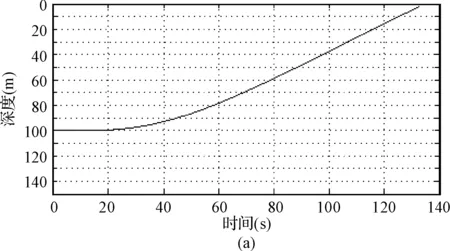


图4 吹除首组主压载水舱潜艇深度、潜浮率和纵倾仿真曲线
由图4知,吹除首组主压载水舱时,潜艇迅速形成尾倾,在t=80s时纵倾就达到了最大11°尾倾,在吹除水舱产生的浮力与艇体水动力作用下,潜艇的潜浮率也迅速增大,最大达到1.1m/s的上浮速度,因此可以看到在吹除后t=130s潜艇就上浮至海面。

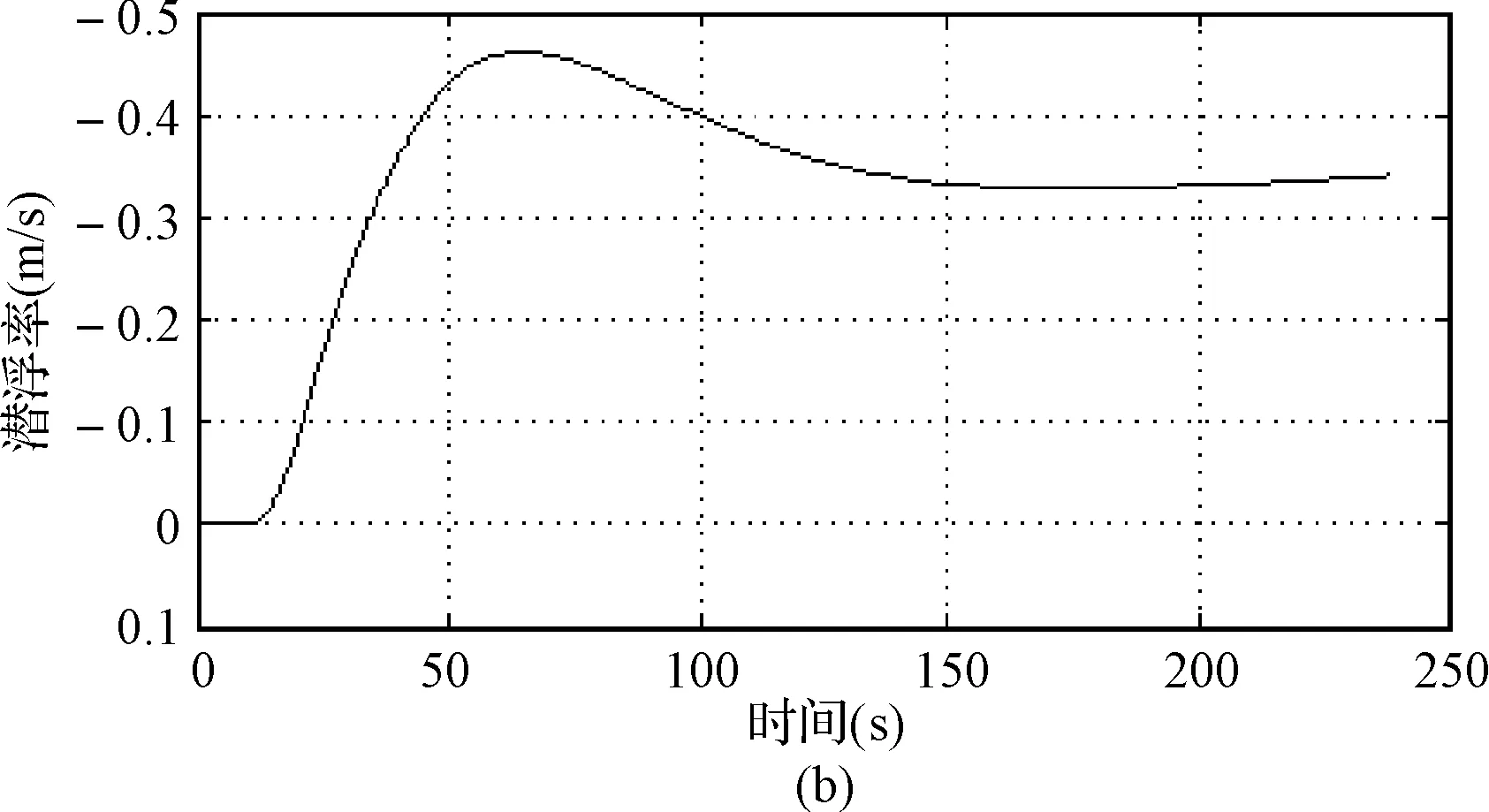

图5 吹除中组主压载水舱潜艇深度、潜浮率和纵倾仿真曲线
由图5知,吹除中组主压载水舱时,先形成小的尾倾再变为首倾,潜浮率在t=50s时达到了约0.45m/s,最终稳定在0.35m/s的上浮速度和4.2°的首倾状态保持稳定上浮,从深度仿真曲线看出上浮速度较平稳,约t=300s时浮至海面。


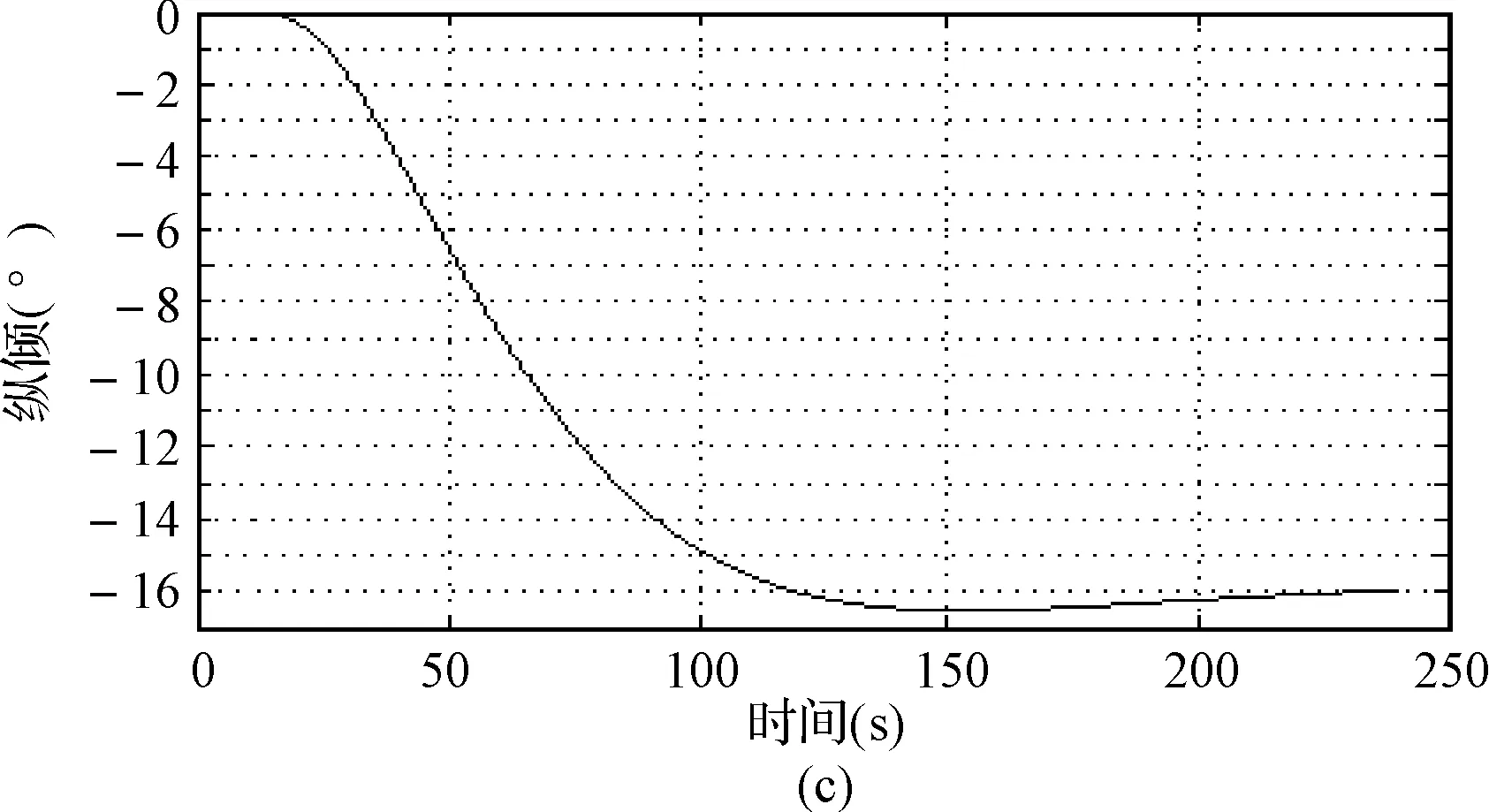
图6 吹除尾组主压载水舱潜艇深度、潜浮率和纵倾变化曲线
由图6知,吹除尾组主压载水舱时,可以看到潜艇姿态的变化相当于打了一个尾下潜大舵角,在吹除后,起初有微小的上浮趋势,很快形成首倾,在艇体水动力作用下开始下潜,下潜速度不大,t=90s时潜艇下潜10m。从图中可以看出潜艇迅速形成首倾,且最大纵倾16.5°,比吹除首组时大5.5°,这是由于潜艇的重心位于中前部所致。
因此,根据以上高压气吹除特点,在挽回舱室进水事故中,可以利用高压气吹除中组主压载水舱控制潜艇的潜浮率,而利用吹除首尾组主压载水舱并辅以升降舵来控制潜艇的纵倾。
5 结语
1) 吹除首组主压载水舱,潜艇能迅速形成尾倾,并且获得较大上浮速度,在舱室进水抗沉措施中,吹除首组主压载水舱具有较好的抗沉效果。若海面情况允许,吹除首组主压载水舱能快速浮至海面。但由于该过程中潜艇尾倾会不断增大,故吹除时间不宜过长。
2) 吹除中组主压载水舱,潜艇深度响应快,但纵倾变化较小,便于控制,因此,针对各种事故的动力抗沉措施,吹除中组主压载水舱是非常必要的。但由于中组主压载水舱位于潜艇中部,对控制潜艇纵倾作用有限,故潜艇首部或尾部进水的情况下,还应适当吹除首组或尾组主压载水舱以形成有利于潜艇动力抗沉的纵倾。
3) 吹除尾组主压载水舱,潜艇能迅速形成首倾,因此,在潜艇尾部舱室进水时,应适当吹除尾组主压载水舱,以防止尾倾过大,形成首倾姿态,不利于潜艇动力抗沉。
4) 在动力抗沉过程中,潜艇上浮速度不宜过快,一方面,难以控制潜艇定深在指令深度;另一方面,会使纵倾变化也较剧烈,不利于潜艇的稳定上浮。
5) 潜艇水下发生舱室进水事故时,尾倾对动力抗沉效果至关重要,首中部舱室进水控制在7°~10°范围,尾部舱室进水控制在3°~5°为宜。若尾倾过小,艇体承载力小;而尾倾过大,又不易控制潜艇纵倾。
[1] 张建华,徐亦凡.潜艇高压气使用[J].四川兵工学报,2009,30(6):96-99.
[2] 刘辉,浦金云.潜艇水下动力抗沉技术研究[J].舰船科学技术,2008,30(6):66-69.
[3] 刘辉,蒲金云,金涛.潜艇应急操纵挽回方式控制效果的仿真分析[J].舰船科学技术,2010,32(5):14-17.
[4] 施生达.潜艇操纵性[M].北京:国防工业出版社,1992:149.
[5] 郝英泽,胡建军,何斌.破损潜艇潜应急吹除及操纵方法研究[J].潜艇学术研究,2006,24(6):21-23.
[6] 叶剑平,戴余良,李亚楠.潜艇主压载水舱高压气吹除系统模型[J].舰船科学技术,2007,29(2):112-115.
[7] 徐亦凡.潜艇操纵原理与方法[M].北京:兵器工业出版社,2008:219.
[8] 王京齐.潜艇的承载力与水下动力抗沉[J].海军工程大学学报,2003,15(4):65-68,72.
[9] 徐亦凡,陈丘岳,胡坤.高压气吹除时机对潜艇动力抗沉影响的仿真研究[J].舰船电子工程,2010,30(11):114-116.
[10] 金涛,刘辉,王京齐,等.舱室进水情况下的挽回操纵[J].船舶力学,2010,14(1-2):34-43.
Research on Impact Analysis of High-pressure Air Affecting Submarine Anti-sinking
LIU Changbo1LIU Zhen2HUANG Haifeng1
(1. Department of Operation Command, Navy Submarine Academy, Qingdao 266042) (2. Graduate Student, Navy Submarine Academy, Qingdao 266042)
Aiming at the absence of quantitative analysis of high-pressure air affecting submarine anti-sinking, and the impercipient impact of it, the different effect of retrieving at different trim and submerged floating rate and the different influence of blowing different tanks are simulated by means of computer simulation. Simulation data show that a large submerged floating rate is a disadvantage for submarine’s stably submerging at a steady trim, and then some suggestions are offered for different cabins’ rushing into water.
submarine, high-pressure air, dynamic anti-sinking
2014年7月3日,
2014年8月27日
刘常波,男,硕士,教授,研究方向:潜艇操纵与运动仿真。刘蓁,男,硕士研究生,研究方向:潜艇操纵与运动仿真。黄海峰,男,研究,讲师,研究方向:潜艇操纵与运动仿真。
U674.76
10.3969/j.issn1672-9730.2015.01.024