水下脉冲噪声源定位原理与方法研究*
2015-03-14谭昕
谭 昕
(北京西三环中路19号 北京 100841)
水下脉冲噪声源定位原理与方法研究*
谭 昕
(北京西三环中路19号 北京 100841)
重物从江河湖海的水面落水着底的瞬间,通常会产生脉冲噪声,并激发海底振动。研究高精度水下脉冲声定位原理和方法,就是为了发现落水重物并确定其着底位置,以便快速打捞或其他处置作业,这对于保证航道畅通以及安全防护具有重大意义。四传感器声学定位系统具有反应速度快和定位精确的优势,论文研究了基于四传感器声学定位系统的工作原理并进行了仿真验证。仿真验证采用理论公式直接计算和半径搜索法相结合的方式进行定位,表明四传感器声学定位系统定位快速且精度高,尤其是定位脉冲声源的方位角精度很高,具有工程应用前景。论文还讨论了影响定位精度的若干因素,为声学定位系统定位水下脉冲噪声源提供了一种解决方案。
声源定位; 脉冲声源; 水下定位系统
Class Number TB556
1 引言
重物从江河湖海的水面落水着底,可能导致航道阻滞,威胁水域安全。需要实时检测落水的可疑重物,快速确定落水重物的着底位置,并及时打捞或做其他妥善处置。为此,研究高精度水下定位技术对维护国土权益和国民经济建设具有重要意义。[1~2]
水下定位系统根据阵列定位基线的长度分为三类,长基线、短基线和超短基线定位系统,这三类定位系统各有利弊[1~2]。长基线阵列可以独立于水深实现高精度定位,但是布阵、测阵与回收操作十分复杂、耗时,成本较高;超短基线定位系统优点为短程定位精度高、尺寸小、重量轻、安装方便,其缺陷之处在于定位精度与斜距有关,距离越远定位精度越低;短基线的定位远距离精度低于长基线,但优于超短基线,使用便捷度也处于两者之间。用于定位的阵列信号处理技术主要有波束形成[3~4]、时间反转镜技术[5~6]、基于到时差的时延估计法[7~9]、MUSIC法[10]等。
本文研究采用短基线水听器阵列进行声源定位的新原理和方法,既便于单个短基线阵列的灵活布置,又能将若干短基线阵列组网使用,进一步提高区域监测的精度和效率。
2 四传感器声学定位系统
自由场中单极子声源的传播方式为球面波:
(1)
考虑在声场中布置了四个声学传感器,用于监测和定位特定区域的突发噪声源,则从噪声源的位置到达四个传感器的信号存在时间差。在四传感器系统中,时间差将会作为输入量用于求取噪声源的位置。不妨选取第1个传感器作为参考点,信号在其余3个传感器与第1个传感器之间存在如下几何关系:
(2a)
(2b)
(2c)
式中(xi,yi,zi),i=1,2,3,4,代表第i个传感器的空间三维坐标,(x,y,z)代表未知脉冲噪声源的三维坐标,Δt1i代表第i个传感器和第1个传感器之间信号的到时差,c代表介质中的声速。
将式(2)中的三个方程分别求平方并消去相同项,得到下述方程组:
2(x1-x2)x+2(y1-y2)y+2(z1-z2)z
(3a)
2(x1-x3)x+2(y1-y3)y+2(z1-z3)z
(3b)
2(x1-x4)x+2(y1-y4)y+2(z1-z4)z
(3c)
令:
ai=2(x1-xi+1),bi=2(y1-yi+1),
ci=2(z1-zi+1),ei=2cΔt1(i+1),


其中i=1,2,3。
由此可以得到简化的表达式:
a1x+b1y+c1z=d1+e1R
(4a)
a2x+b2y+c2z=d2+e2R
(4b)
a3x+b3y+c3z=d3+e3R
(4c)
重新整理和排列式(4),可得方程:
x=p1+q1R
(5a)
y=p2+q2R
(5b)
z=p3+q3R
(5c)
其中
将式(5)代入R的表达式并对公式两端求平方,则可得:
R2= (p1+q1R-x1)2+(p2+q2R-y1)2
+(p3+q3R-z1)2
P=-p1q1-q2q2-p3q3+x1q1+y1q2+z1q3,
最终,可以得到方程组(2)的解为
(6a)
(6b)
(6c)
方程有两个解,只有其中一个是实际的声源,可以根据声源到达传感器的距离远近和测量得到的声程差是否一致来判定声源位置的真伪。也可以增加1~2个传感器用于计算到时差,判定定位的真伪。

3 数值仿真与讨论
本节利用Matlab软件仿真实现四传感器声学定位系统的定位功能。假设声源按照无指向性点源的传播方式向外辐射噪声,不受反射和背景噪声的干扰。四个水听器的空间位置为(d0,0,0),(0,d0,0),(0,-d0,0),(0,0,d0),d0=10m,这种水听器阵列便于制造和布置,其示意图见图1。取水中声速1450m/s,采样频率100kHz,假定监控半径200m。模拟声信号是一个指数衰减的信号,利用互相关函数获取到时差。仿真过程对俯仰角[-30°,30°]和圆周角[-90°,90°]范围内随机均匀分布的50个点进行了定位。仿真的结果如图2和3所示。由于是仿真实验,可以事先获得声源的理论位置,所以定义定位误差公式为
(7a)
(7b)
(7c)

模拟声信号呈指数快速衰减,可以用下式表示:
(8)

图1 四传感器阵列与声源模型示意图
图2显示了载波频率在100~6000Hz范围内50个随机分布的定位点的平均定位精度,结果显示频率对定位精度的影响可以忽略。图3是监控半径在5m~200m范围内的50个点源定位结果,结果表明定位的结果对于方位角的准确性很高,控制在1%~2%的范围内,用绝对误差均方值评价也小于1.6°,方位误差一般与方位角的大小无关。对于半径的定位精度略差,但也在6%以内。本文的研究没有考虑信噪比的影响,但是从理论的推导可以判定,信噪比不直接影响该方法的精度,它通过影响到时差的计算结果改变定位精度。
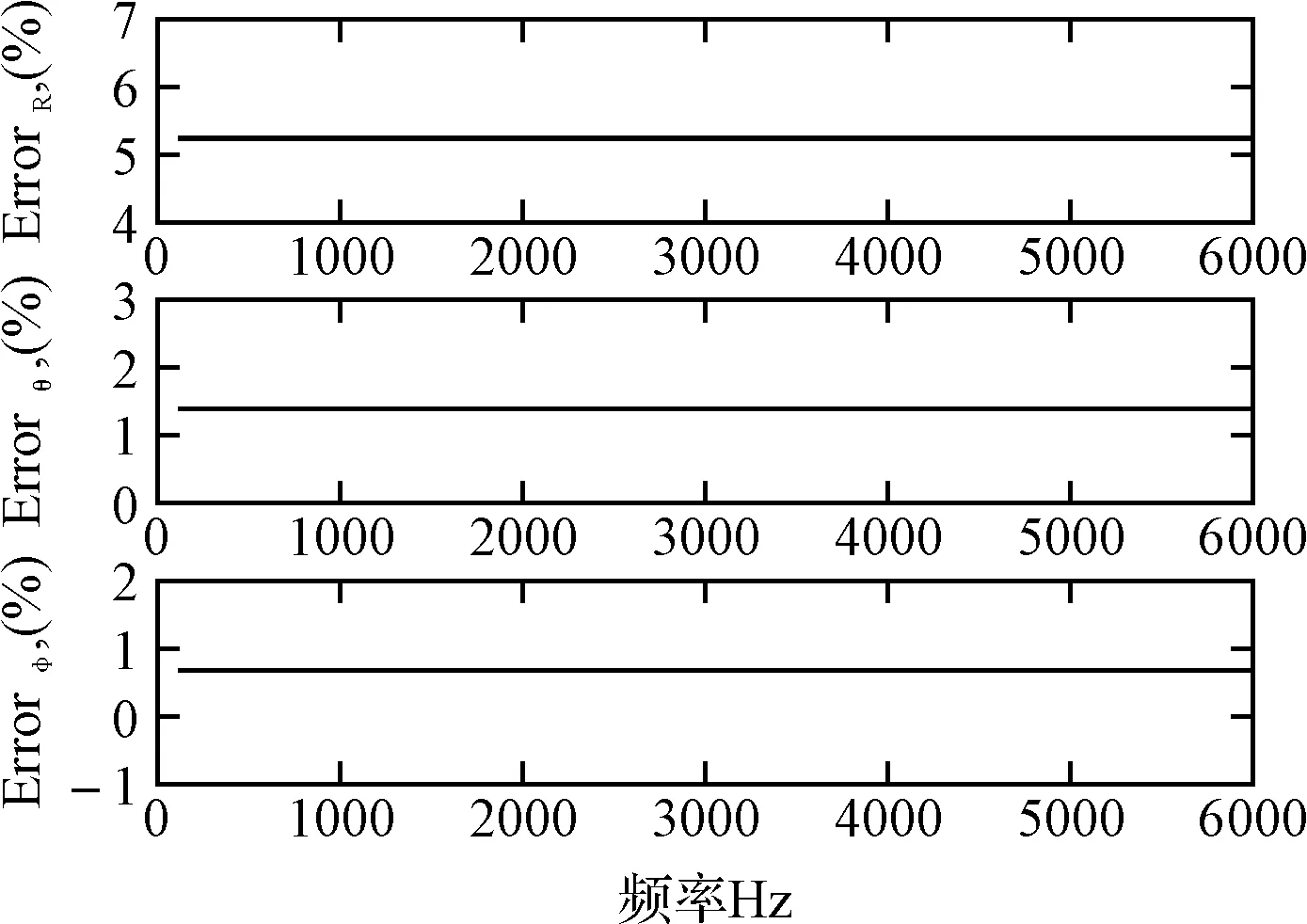
图2 误差随频率的变化曲线

图3 定位值与理论值对比曲线
从公式推导与数值仿真可以发现,定位的准确度和到时差息息相关,因此获得高精度的到时差将会提供准确的声源定位。在实际应用中,还需要解决一些影响因素提高定位的精度。水下背景噪声和水底、水面的反射信号会影响到时差的计算,广义互相关法[11]可以有效地消除水中的反射和混响,明显提高到时差计算精度。利用盲源分离法、独立分量分析等信号处理方法有助于在高背景噪声条件下分离出脉冲噪声[12]。由于阵列在水下布置,存在定位困难,因此需要研究由于传感器定位误差导致的噪声源定位偏离。研究中没有考虑水流对声信号传播的影响,由此产生的多普勒效应对计算到时差的影响值得分析。另外,水声传播路径上的温度和盐度变化通过影响声速,而影响水听器信号时延的测量。以上提及的因素都值得进一步研究,以期提高定位精度。由于声信号随着传播距离的增大而衰减,信噪比降低,会严重影响定位精度。因此,可以考虑布置多个四传感器定位系统联合工作,从而使监测区域能覆盖热点水域。
4 结语
本文提出了一种四传感器阵列的短基线定位系统,建立了四传感器系统声学传播与接收模型,利用测得的信号时延为变量获得了声源位置的计算公式。数值仿真表明四传感器定位系统可以很好的定位脉冲噪声源,定位误差主要来源于到时差的测量和计算误差。通过对影响定位误差主要因素的初步分析,指出了该技术需要进一步研究的问题,以满足阵列设计、算法完善和组网技术等工程开发于应用的需要。
[1] 李守军,包更生,吴水根.水声定位技术的发展现状与展望[J].海洋技术,2005,24(1):130-135.
[2] 孙大军,郑翠娥,钱洪宝,等.水声定位系统在海洋工程中的应用[J].声学技术,2012,31(2):125-132.
[3] 时洁,杨德森.基于矢量阵宽带MVDR聚焦波束形成的水下噪声源定位方法[J].信号处理,2010,26(5):687-694.
[4] 惠娟,胡丹,惠俊英,等.聚焦波束形成声图测量原理研究[J].声学学报,2007,32(7):357-361.
[5] Yon S, Tanter M, Fink M. Sound focusing in rooms: The time-reversal approach[J]. The Journal of the Acoustical Society of America,2003,113(3):1533-1543.
[6] 时洁,杨德森,刘伯胜,等.基于虚拟时间反转镜的噪声源近场定位方法研究[J].兵工学报,2008,29(10):1215-1219.
[7] Zhu N, Wu S F. Sound source localization in three-dimensional space in real time with redundancy checks[J]. Journal of Computational Acoustics,2012,20(1):515-530.
[8] 喻敏,惠俊英,冯海泓,等.超短基线系统定位精度改进方法[J].海洋工程,2006,24(1):86-91.
[9] 孙书学,顾晓辉,孙晓霞.用正四棱锥形阵对声目标定位研究[J].应用声学,2006,25(2):102-107.
[10] 李仁和.基于小波分析与MUSIC法的联合算法对信号DOA的估计[J].通信技术,2008,41(9):47-49,52.
[11] 盛成明.基于广义互相关法的水下被动测距时延估计技术[J].舰船电子工程,2011,31(5):149-152.
[12] Wu S F, Zhu N. Blind extraction and localization of sound sources using point sources based approaches[J]. The Journal of the Acoustical Society of America,2012,132(2):904-917.
Principle of Locating Underwater Impulsive Noise Source and Its Techniques
TAN Xin
(No. 19 Central Xisanhuan Road, Beijing 100841)
The impulsive vibration and sound signal is induced when the heavy objects falling from the water surface shock the water bottom. The research on accurately locating underwater impulsive noise sources will serve to find the objects. The security of channel will be guaranteed after cleaning the located barrier objects. A four-sensor acoustic locating system is introduced which can position acoustic source accurately and rapidly. The method of four-sensor acoustic locating system is introduced as well as its validity is verified by numerical simulations. Direct calculation due to analytical formula combined with radius searching method is applied in simulations. The high positioning accuracy, especially the azimuth, is obtained. The accurate results show its potential application in engineering. Some influence factors effecting positioning accuracy are discussed. The research can be a solution for positioning underwater impulsive acoustic sources.
noise source location, impulsive noise, underwater locating system
2014年7月19日,
2014年8月31日
谭昕,男,硕士,研究方向:武器系统综合运用。
TB556
10.3969/j.issn1672-9730.2015.01.041
