船舶电力推进负载模拟系统研究
2015-03-14何琪
何 琪
(浙江国际海运职业技术学院,浙江 舟山 316021)
船舶电力推进负载模拟系统研究
何琪
(浙江国际海运职业技术学院,浙江 舟山 316021)
摘要:首先对船舶电力推进负载模拟系统的原理进行数学上的理论证明和推导,然后建立电力推进螺旋桨负载模拟系统,最后通过空间矢量脉冲宽度调制SVPWM控制算法,搭建Simulink仿真模型进行仿真。仿真结果证明,模拟系统所采用的模拟原理和方法的合理性。此方法也可应用于其他的电气传动模拟系统。
关键词:电力推进;模拟系统;实时仿真
0引言
船舶电力推进跟其他推进方式相比,具有工作噪音极小、效率高、功率密度大、可操作性强、机动性灵活、既环保又节能等优点。这些优点使其成为国内外船舶制造界和高校科研院所的研究热点。每一个投入到实际当中的系统需要经过严格的实验结构才能转入到实际当中,因此尽量降低实际环境因素变化所带来的研制成本,降低实际应用中可能出现各种问题的可能性,才能在实际推进系统能够多次地在模拟实际环境中只需要适当改变参数就能够进行验证。最后,考虑到研发周期、实验装置调试、系统性能的改进等因素,在实验室利用计算机仿真技术建立适当的模拟仿真系统,是一种快速几乎无成本验证结果的方式,降低了研发的风险。
轨道电力牵引、轧钢中电气传动系统的推进系统的原理、功率等级和控制算法都与船舶电力推进系统有很许多相似之处。目前,众多的文献中都只提及对模拟系统实验形式、负载模型和控制策略,但缺少对负载模拟原理的推导和结果的详细分析[1-2]。
本文对船舶电力推进中螺旋桨负载模拟系统的原理进行推导,并采用合适的模拟系统控制策略对系统的动态过程进行分析。最后,利用Simulink仿真功能,对动态调节过程和静态性能进行仿真和证明。为检验模拟原理的正确与否,还在实际的小比例螺旋桨模拟系统中进行仿真实验。
1模拟系统原理
目前用于船舶推进的电动机绝大多数采用高速的推进电机。为了使其能够与低速的负载进行匹配,需要在推进电机和螺旋桨间配备减速箱。因此,对带减速器的推进系统进行研究具有非常重要的实际意义。首先为船舶推进系统中的轴系建立模型,然后利用数学知识推导出模拟系统原理方程。船舶推进系统结构如图1所示,主要包括螺旋桨、减速器和推进电机等。建立的船舶推进模拟系统如图2所示,主要由联轴器、推进电动机、模拟电动机和扭矩传感器等组成。通过控制模拟电动机的输出转矩,使模拟系统与实际推进电机的轴负载转矩相等,便可模拟实际的负载特性[3]。
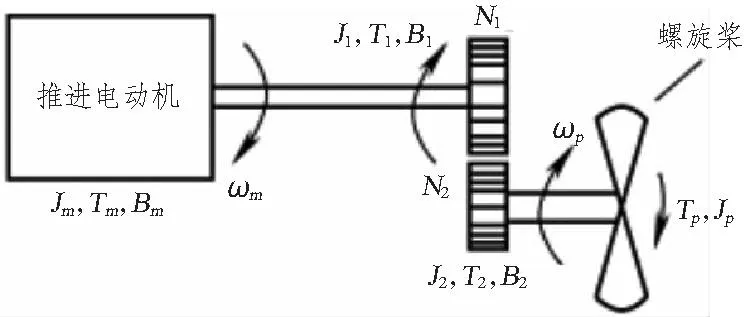
图1 船舶推进系统的结构示意图Fig.1 Schematic diagram of the actual system
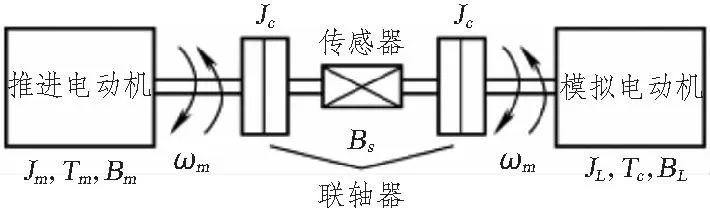
图2 船舶推进模拟系统结构示意图Fig.2 Schematic diagram of the simulation system
对于实际中的船舶电力推进系统轴系结构,在忽略静止、库仑摩擦和轴两端速度动态上差异的情况下,根据牛顿力学中的第二定理,可得到
(Jm+J1)pωm+(Bm+B1)ωm+T1=Tm,
(1)
(Jp+J2)pωp+B2ωp+Tp=T2,
(2)
T1=N1T2/N2,
(3)
ωm=N2ωp/N1。
(4)
式中:Jm为船舶推进电动机的转动惯量;Jp为螺旋桨的转动惯量;Bm为船舶推进电机的粘滞摩擦系数;ωm为推进电动机的角速度;ωp为螺旋桨的角速度;N1和N2分别为减速器的原端齿数和副端齿数;J1和J2分别为减速器原端转动惯量和副端转动惯量;B1和B2分别为减速器原端粘滞摩擦系数和副端粘滞摩擦系数;ω1和ω2分别为减速器原端角速度和副端角速度;T1和T2分别为减速器原、副端转矩;Tm为推进电机的电磁转矩;p为微分算子。
定义传动比i=N2/N1,联合式(1)~式(4)可得:推进电动机侧负载转动惯量的归算值为JL′,推进电动机侧的负载粘滞摩擦系数的归算值为BL′,则船舶电力推进系统的负载平衡方程为



(5)
式(5)表明船舶电力推进电机的实际负载转矩

(6)
同样,TL为模拟电动机电磁转矩;J3为电力推进电动机侧的归算负载转动惯量;B3为电力推进电动机侧归算负载粘滞摩擦系数;JL为模拟电动机的转动惯量,Jc为连轴器的转动惯量;BL和Bs分别为模拟电动机和扭矩传感器的粘滞摩擦系数。因此,负载模拟系统的机械平衡方程可表示为
Tm-(Jmpωm+Bmωm)=TL+(J3pωm+B3ωm)。
(7)
对比式(5)和式(7)可得到:需要具备式(8)所列的条件表达式,才能实现负载的模拟。
TL+(J3pωm+B3ωm)=TLP。
(8)
实现式(8)所表示的条件有2种方法:一是模拟直接控制电力推进电机的电磁转矩的过程;二是模拟控制电动机的负载转矩,进而控制电磁转矩的过程。在忽略摩擦的情况下,直接控制推进机电磁转矩有2种方式:一是加惯性飞轮补偿转动惯量;二是去掉具有惯性的飞轮。前一种方式下,只需使TL=Tp/i就可以实现负载的模拟;后一种方式下,控制模拟推进电机的电磁转矩补偿部分转的动惯量同样可以实现对负载的模拟。但这2种方式都需要计算转动惯量补偿的问题。为了让负载模拟更加地接近实际中的模型和工况,扭矩传感器也不能省去。考虑到这些因素,加入负载转矩控制外环后,可以间接地控制模拟推进电机的电磁转矩,进而实现更加精确的负载模拟[4]。
对于一个几十千瓦小功率的实际模拟系统,由扭矩传感器中的摩擦所引起的转矩损耗可以完全忽略。因此,可以得到船舶推进电机的负载转矩等于扭矩传感器测量的转矩与对接联轴器的惯性转矩的相加的总转矩,即
TLm+JCpωm=Tm-(Jmpωm+Bmωm)=TLP。
(9)
联立式(8)和式(9)可得
TLm-JCpωm=TL+(JLpωm+BLωm)。
(10)
虽然模拟推进电机与船舶推进电动机对称地分布在扭矩传感器的两边,但从式(9)与式(10)中可以看出,二者的数学符号不同,这正好代表了这2个电动机的工作状态,即如果其中一个工作在发动机状态,则另一个必工作在发电状态。因此,2个电动机电磁转矩方向总相反,这个特点使能量能够正确地流动,同时也保证了船舶电力推进负载模拟系统能够稳定运行。联和式(6)和式(9)可得
TLm=TP/i+(JL′-JC)pωm+BL′ωm。
(11)
为了实现负载的模拟,仅需按照式(11)所示的控制模拟系统轴上的负载转矩即可。式(7)和式(11)所表达的原理可用图3所示的模拟系统原理图来示意。
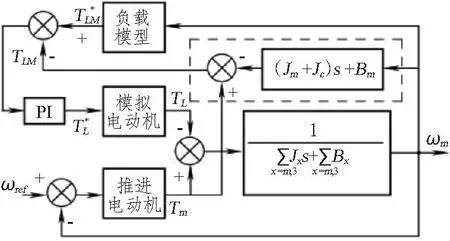
图3 模拟系统原理框图Fig.3 Block diagram of the simulation system
一些简单的负载,如风机中的负载、水泵的负载、传送带的负载等可以通过一个多项式来表示一个负载的模型,但对于复杂的负载,如船舶电力推进等特性就要建立特殊的负载模型(如船桨模型等)来获得TLm*。实际轴负载转TLm如图3中的虚线框内所示。它可以根据式(9)进行计算或通过观测的方式,也可以由扭矩传感器直接测得。同样地,它不需要知道电动机的实际参数,大大减少了成本,降低了研发的风险。
2船用螺旋桨负载特性
负载模拟装置模拟的是船舶实际运行时的螺旋桨的推力特性和扭矩特性等负载特性。船桨模型的建立的基础就是痛推力特性和扭矩特性把船、机、桨三者。此外,其中最显著的反转扭矩特性,则多用来检验负载模拟系统的性能以及可行性。
螺旋桨的推力Fp和扭矩Tp以及桨的敞水效率等随着船舶的螺旋桨的转速和航行速度的比值变化关系等都是由船用螺旋桨推力特性来体现。螺旋桨通过推水产生动力,除了其自身需要不停地旋转外,还要随船同步进行轴向移动。如果定义Vp为螺旋桨的净转速,那么螺旋桨的推力Fp和扭矩Tp可表示为
FP=KFρD4n2,
TP=KTρD5n2,
J=hp/D=vp/(nD),
η0=FPvp/(2πTPn)=JKF/2πKT,
PP=πTPn/30。
式中:ρ为海水密度;n为螺旋桨转速;D为螺旋桨直径;KT和KF分别为螺旋桨的推力和扭矩系数;J为螺旋桨的进速比;ηo为螺旋桨的扭矩效率;Pp为螺旋桨所需的功率。
敞水状况下,KF-J和KT-J所显示的螺旋桨敞水性质如图4所示。

图4 螺旋桨的敞水性质Fig.4 Propeller open water characteristic curve
3控制策略
控制轴上的负载转矩是船舶电力推进负载模拟系统的目的,因此可采用转矩闭环的方式实现零静态误差的转矩控制。此外,考虑系统的动态响应性能和控制精度等,船舶电力推进模拟系统可采用前馈式间接矢量控制方法。图5为与转矩控制闭环相关部分。空间矢量调制(SVM),用于完成空间矢量脉冲宽度调制(SVPWM)算法。
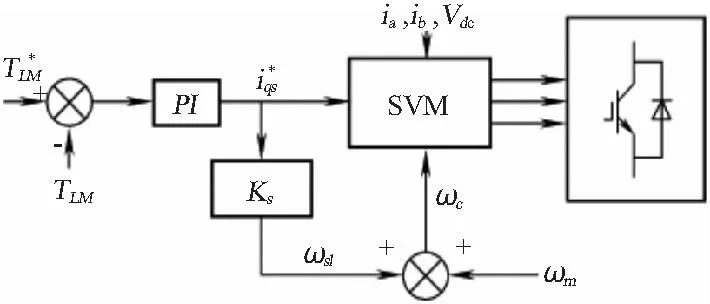
图5 控制策略示意图Fig.5 Schematic diagram of the control strategy
根据圆形磁链的二维坐标系下建立船舶电力推进同步电机转子的模型,可以得到

(12)
(13)
式中:ωsl为预设的转差角频率;iqs为定子电流的q轴分量;ψr为转子磁通有效值;Lm为励磁电感和转子电感;Rr为转子电阻。
联立式(12)和式(13)可得
(14)
式(14)表明,当转子磁通不变时,与转差频率控制类似,电磁转矩与转差成正比。稳态性能方面,二者电磁转矩和转差都表现出比较良好的静态性能;动态性能方面,转差频率控制的动态响应性能比间接磁场定向控制要差很多。
4系统仿真实验及结果
在Simulink中搭建负载模拟系统模型框图,其动态响应的波形如图6和图7所示。当推进系统速度给定ωm*升高时,推进电磁转矩Tm先升高然后恢复原状态;当模拟推进电机的电磁转矩预设TL*猛增时,为了维持转速,电磁转矩会急剧增大以抵抗此变化。其中间过程会出现超调,过后恢复到与电磁转矩预设值几乎相等。这些结果正好证明了以上分析的正确性。

图6 模拟电机和推进电机电磁转矩波形Fig.6 Analog motors and electromagnetic propulsion motor torque waveform

图7 Dynamic response waveformFig.7 Dynamic simulation waveform adjustment
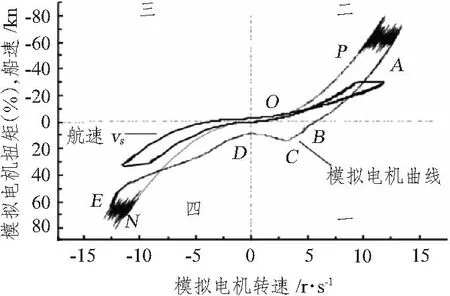
图8 模拟推进电机由正转进入到反转的过程曲线Fig.8 Curves of simulation propulsion motor from forward into reverse
通过对螺旋桨的四象限工况进行模拟,仿真结果的详细分析如下:图8是实际的船舶电力推进负载模拟系统中模拟推进电机的转速和扭矩的关系。其中OP段显示船舶从零速正向起动航行的过程;ON段表示反向起动运行的过程;ABCDE段表示正向反转时对应的螺旋桨运行状况。图8中,电机处于推进电机状况时,船舶的航行速度vs由0开始正向旋转或者反向旋转,而此时螺旋桨模拟电动机处于发电状态,工作在二四象限,特性曲线表现为原点对称。螺旋桨反转时的情况比较复杂,全过程可以分为3个阶段,即AB,BCD和DE。AB段模拟的过程是螺旋桨速度降低、船舶的航行速度开始下降,此时电机处于发电状态,工作在第二象限;BCD段模拟推进电机往第一象限推进电机的逼近过程。此时,模拟船舶处于水轮机工作状态继续前行,而螺旋桨由于受到阻力会维持之前的旋转方向;DE段模拟推进电机在第四象限的工作情况,此时,虽然螺旋桨开始逆向旋转,船舶的航行速度会继续运行一段时间后才逐渐变负[7]。
5结语
本文详细介绍了电力推进负载模拟系统建立的过程,并分析和实现了各种典型工况(比如变速、突然加入负载转矩、转矩方向自由改变等)下螺旋桨的工况模拟,仿真结果显示了良好的动态响应和调节过程,证明了船舶电力推进负载模拟系统的可行性,同时也说明以上的数学分析是正确的。最后,电力推进的负载模拟原理和方法也可以推广应用到其他电气传动模拟系统上,给其他领域的科研工作者提供一些参考。
参考文献:
[1]张丛.船舶电力推进螺旋桨负载模拟系统的研究[J].船舶工程,2011,33(4):25-27.
ZHANG Cong.Research on propeller load simulation system for marine electrical propulsion[J].Ship Engineering,2011,33(4):25-27.
[2]黄从武,沈建清.双馈电机在船舶电力推进负载模拟中的应用与仿真[J].微特电机,2007,35(4):14-15.
[3]张利军,孟杰,兰海.计及螺旋桨负载的船舶电力系统协调控制设计[J].控制理论与应用,2011,28(4):531-537.
ZHANG Li-jun,MENG Jie,LAN Hai.Coordinate control design for system of marine diesel engine generator with propeller loads[J].Control Theory&App;ications,2011,28(4):531-537.
[4]刘敏,刘德志,沈建清,等.直接转矩控制的双馈电机负载模拟系统仿真研究[J].电机与控制应用,2006,32(9):26-30.
Research of load simulation system for marine electric propulsion
HE Qi
(Zhejiang International Maritime College,Zhoushan 316021,China)
Abstract:This paper firstly, deduce the principle of ship electric propulsion system load simulation, then build electric propulsion propeller load simulation system. Finally, use the space vector pulse width modulation SVPWM control algorithm and build Simulink simulation model for simulation. The simulation results prove the rationality of the simulation system used by the simulation principles and methods, and has some promotional. This method can be applied to other reference analog electric drive systems.
Key words:electric propulsion;simulation system;real-time simulation
作者简介:何琪( 1980 - ) ,男,讲师,主要研究方向为船舶自动化。
收稿日期:2014-10-19; 修回日期: 2014-11-10
文章编号:1672-7649(2015)02-0128-04
doi:10.3404/j.issn.1672-7649.2015.02.027
中图分类号:U664.3
文献标识码:A
