月球巡视器太阳电池阵电性能仿真模型参数辨识方法
2015-03-13彭鑫刘书豪殷建丰王倩李清毅
彭鑫 刘书豪 殷建丰 王倩 李清毅
(北京空间飞行器总体设计部, 北京 100094)
月球巡视器太阳电池阵电性能仿真模型参数辨识方法
彭鑫 刘书豪 殷建丰 王倩 李清毅
(北京空间飞行器总体设计部, 北京 100094)
为使月球巡视器太阳电池阵电性能仿真模型更精确地模拟真实在轨太阳电池阵硬件系统的工作状态,提出对仿真模型进行参数辨识的方法。给出了太阳电池阵电性能仿真模型,分析其输入、输出与初始化参数,说明了利用遗传算法和遥测数据开展参数辨识的可行性。提出仿真模型参数辨识方法的总体思路,即将遥测数据作为激励源,再采用遗传算法开展参数辨识。利用某一时段的遥测数据对仿真模型参数进行辨识,并用其他时段的遥测数据对辨识结果进行验证。结果表明:辨识后的仿真模型输出与对应遥测值的接近程度更高,仿真模型的输出偏差可减小约50%。文章提出的仿真模型参数辨识方法,可使仿真模型在月球巡视器在轨期间的任务规划验证和伴飞任务中提供精准预报。
月球巡视器;太阳电池阵;电性能仿真模型;模型参数辨识;遗传算法;在轨遥测数据
1 引言
利用巡视器对月球进行巡视探测,通常需要巡视器仿真模型辅助计算和决策。例如,在嫦娥三号任务中,将地面任务规划作为仿真模型的输入,可快速模拟后续一个时段内巡视器的工作状态,对规划方案进行验证与优化,为实现巡视器遥操作提供重要支撑。太阳电池阵是巡视器的电源供给系统,其电性能仿真模型仿真的准确性,决定了放电深度等关键指标能否实现正确预测。从在轨应用情况来看,太阳电池阵电性能仿真模型总体上能够拟合真实太阳电池阵输出特性的变化趋势,但是从仿真和遥测数据的对比可知,两者仍存在一定偏差,这将对仿真模型的预报功能有一定影响。其原因包括两方面:一是模型中部分参数无法通过地面试验直接获得;二是设备所处的空间状态与地面环境存在较大差异,可能导致部分参数不再适用于空间环境。因此,要采用合适的仿真模型参数辨识技术[1],对太阳电池阵电性能仿真模型进行参数辨识。
对于太阳电池阵电性能仿真模型的参数辨识,目前大多基于解析法以及地面测试数据[2]。利用解析法时,要求模型的数学表达式具有解析解,这在一定程度上限制了模型的适用范围及精度;而且利用测试数据进行模型参数辨识,无法解决环境改变对仿真模型参数影响的问题。为此,本文提出利用遗传算法及月球巡视器在轨遥测数据进行仿真模型参数辨识的方法。遗传算法只需要太阳电池阵电性能模型的输出与参数相关,而不必限定其有解析解,因此几乎可以辨识任意形式的模型,且可以随环境改变快速辨识新环境下的参数。
本文介绍了月球巡视器太阳电池阵电性能仿真模型,分析了应用遗传算法开展仿真模型参数辨识的可行性;介绍了仿真模型参数辨识的方法、步骤;结合在轨遥测数据对仿真模型参数进行辨识,并对辨识结果进行验证,证明了本文辨识方法的有效性。
2 可行性分析
太阳电池阵电性能仿真模型是进行巡视器电源系统仿真的基础,由基本太阳电池阵模型、月尘模型及遮挡模型构成,能够计算在光照、温度、老化、月尘、遮挡影响下太阳电池阵的伏-安特性曲线。仿真模型的输入为太阳光照状态、太阳电池阵温度等信息,输出为太阳电池阵的功率、电流。
基本太阳电池阵电性能仿真模型用伏-安特性曲线表示输出电流I和电压V的函数关系[3],见式(1)。
(1)

上述仿真模型为仅考虑光照、温度与寿命衰减的基本太阳电池仿真模型。完整的仿真模型还要利用月尘模型、遮挡模型对太阳电池阵基本模型进行修正后得到,详细论述可参见文献[4]。

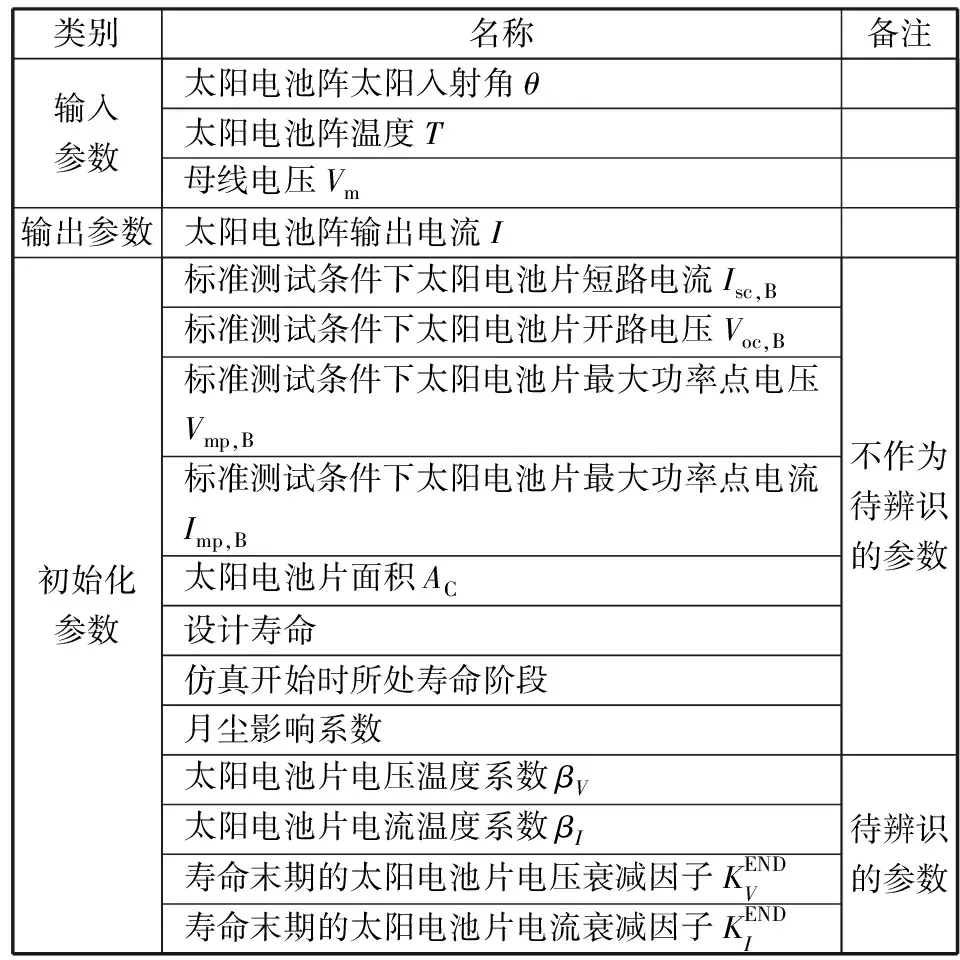
表1 巡视器太阳电池阵电性能仿真模型参数
从上述分析可以看出,太阳电池阵电性能仿真模型属于非线性、部分模块无法用数学公式表示的复杂模型,而且仿真模型的输出与待辨识参数相关,即仿真模型的输出是待辨识参数的函数。
在仿真模型参数辨识方法方面,国内外开展了许多研究工作[5-7],形成了一些常用的辨识方法,主要包括最小二乘法[1]、极大似然参然估计法[1]、预报误差法[1]和智能优化算法[1]等。最小二乘法可以解决定常或时变的线性系统等模型参数辨识问题。极大似然估计法以观测值出现的概率最大作为估计准则,获得系统模型的参数估计值。预报误差法需要设计一个预报模型,通过历史数据和参数给出当前时刻观测量的预报值,并按照预报误差的平方和最小的准则来估计参数。智能优化算法适用于解决非线性、无法用数学公式表示的复杂模型参数辨识问题。由于本文使用的太阳电池阵电性能仿真模型具有非线性,部分计算模块没有数学表达式的特点,因此在上述方法中只有智能优化算法适合对其进行模型参数辨识。遗传算法(Genetic Algorithm,GA)[8]是智能优化算法的一种,以自然遗传中的优胜劣汰、适者生存的法则为基础,将生物的自然进化过程进行抽象和简化,是一种自适应、启发式、全局优化的智能算法,只需要太阳电池阵电性能模型的输出与参数相关,不必限定其有解析解,因此非常适合太阳电池阵电性能仿真模型的参数辨识。
3 仿真模型参数辨识方法
本文提出的太阳电池阵电性能仿真模型参数辨识方法,将遥测数据作为太阳电池阵硬件的输入、输出真值,并作为仿真模型参数辨识方法的激励源,再采用遗传算法开展仿真模型的参数辨识。
仿真模型参数辨识需要真实系统与仿真模型具有相同的输入激励源,并将真实系统与仿真模型输出的偏差作为参数辨识方法的输入,太阳电池阵硬件系统在轨期间的输入、输出值只能通过遥测数据获得,因此需要将遥测数据作为仿真模型参数辨识方法的激励源。航天器在轨期间遥测数据与仿真模型的偏差,一方面可能来源于遥测数据本身的误差,另一方面可能是由于太阳电池阵在轨期间因环境改变引起硬件参数变化。因此,在航天器在轨期间有必要利用遥测数据和遗传算法对仿真模型进行修正,以提高仿真模型的在轨应用精度。虽然在实际工程中遥测误差是存在的,但是地面运控人员是以遥测数据作为航天器在轨状态的判断依据,对于仿真模型来说,为了更精准地进行航天器在轨期间的任务规划验证,以及仿真模型与航天器的伴随运行,可将经过一定预处理后的遥测数据认为是真值。
太阳电池阵电性能仿真模型参数辨识流程见图1,具体步骤如下。
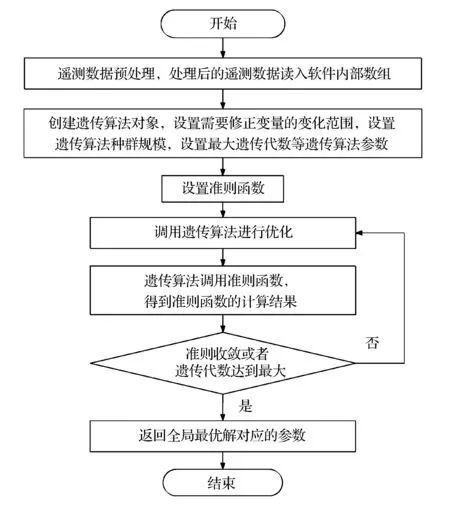
图1 仿真模型参数辨识流程Fig.1 Flow of simulation model parameter identification
(1)读入经过预处理的遥测数据:在遥测数据采集过程中,由于受巡视器本身、传感器以及无线电传输过程的干扰,接收数据经常会产生异常跳变点或空值,因此在模型修正前,首先要对遥测数据进行处理。另外,太阳入射角无法直接从遥测数据中获取,须要根据已有的遥测数据进行解算。
(2)设置参数范围并进行编码:需要优化的参数称为染色体,染色体可以采用二进制编码或者实数编码。在实数编码中,每个染色体的编码是与解向量同样长度的实数向量,每个元素的初始值都选在所指定的区域内。实数编码不受精度和值域的影响,并且具有明显的物理意义,因此本文选择实数编码方法。此外,还要设置种群规模、最大遗传代数、变异概率、交叉概率等遗传算法参数,种群规模一般取为10~50。对于实数向量编码的遗传算法,变异比交叉更重要,以保证种群的多样性和引入新的最佳解,一般取变异概率为0.01,交叉概率为0.80~0.90。
(3)设置准则函数:仿真模型参数辨识的目标是使模型的输出数据逼近遥测值,因此准则函数可根据仿真值与遥测值的偏差进行设置。假设经处理后的遥测数据共包含N组用于仿真模型参数辨识的遥测数据,xi为仿真模型的第i组遥测输入,yi为与xi对应的遥测输出,ω为一组待辨识参数值,g(xi,ω)为该组遥测输入计算得到的仿真输出,则定义仿真值与遥测值的偏差为J(ω),进而定义准则函数为f(ω)=1/J(ω)。
(2)
(4)调用遗传算法的优化函数进行迭代计算。本文所使用的遗传算法中没有按照传统的变异概率和交叉概率进行变异和交叉运算,而是设置了几种不同的变异和交叉算子。设置4种变异算子,分别为边界变异、多点非均匀变异、非均匀变异和均匀变异;4种算子分别完成4次、6次、4次、4次变异运算,每次随机选取染色体1个变异位置。设置3种交叉算子,分别是线性交叉、启发式交叉和单点交叉;每种算子完成3次交叉运算,每次随机选取染色体2个交叉位置。
(5)利用变异和交叉生成1代后,遗传算法调用并计算准则函数。如果准则没有收敛且遗传代数没有达到最大,转入第(4)步继续计算;否则计算结束,返回全局最优解对应的参数。
4 仿真模型参数辨识结果及分析
4.1 辨识结果
为验证月球巡视器太阳阵电性能仿真模型参数辨识方法,本文以嫦娥三号巡视器的在轨遥测数据作为模型修正算法的激励源,针对巡视器+Y太阳电池阵开展仿真模型参数辨识,使模型参数逼近巡视器的在轨状态。根据嫦娥三号巡视器的硬件设计状态,太阳电池阵温度(T)、太阳电池阵输出电流(I)、母线电压(Vm)等均有相应的遥测值对应,而太阳入射角则可根据遥测数据中的巡视器位置、姿态、太阳翼转动角度等信息进行求解,因此遥测数据能够完全覆盖太阳电池阵电性能仿真模型修正所需的激励源,支持仿真模型的参数辨识工作。为使遥测数据含有较多信息量,选取2013年12月某天变化较为剧烈的一段遥测数据(共2744组)用于仿真模型参数辨识。需要辨识的仿真模型参数及其在遗传算法中的范围设定,如表2所示。试验中,选取遗传算法的初始种群规模为30,最大遗传代数为30。
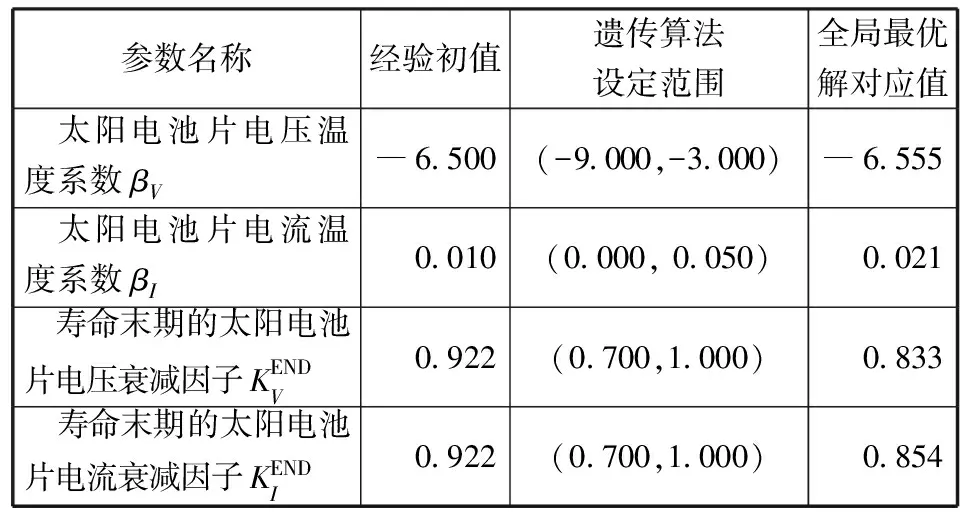
表2 需要辨识的仿真模型参数
根据遥测数据得到仿真模型的输入:太阳入射角、太阳电池阵温度、母线电压随时间的变化情况(见图2~4),将其输入辨识前的仿真模型,计算+Y太阳电池阵输出电流的仿真值,将仿真值与遥测值中的太阳电池阵输出电流进行比较,如图5(a)所示。调用本文方法对太阳电池阵电性能仿真模型进行辨识,得到辨识后的参数(全局最优解对应的参数,如表2所示)。利用这些参数重新进行仿真计算,并将仿真值和遥测值进行比对,如图5(b)所示。从图5中可以看出,仿真模型参数辨识前和辨识后输出值的总体变化趋势与遥测数据基本保持一致,说明仿真模型总体上能够模拟太阳电池阵硬件系统。辨识前,在温度变化最为剧烈的阶段(前236组数据,第315到1961组数据),仿真值与遥测值之间的偏差较大,经过本文方法对仿真模型参数辨识后,减小了仿真值与遥测值之间的偏差。
从表2中的全局最优解对应值可以看出,辨识后的参数值发生了变化,而且也较合理。辨识前,仿真值和遥测值之间的偏差J(ω)为6.16,均值偏差为0.63%;辨识后,J(ω)为3.06,均值偏差为0.012%。可见,辨识后的仿真值与遥测值的接近程度更高,J(ω)减小约50%,本文方法对仿真模型的优化起到了较好的作用。同时可以发现,电流温度系数的调整比例最大,使仿真模型能够较好地跟踪温度变化对输出电流的影响。
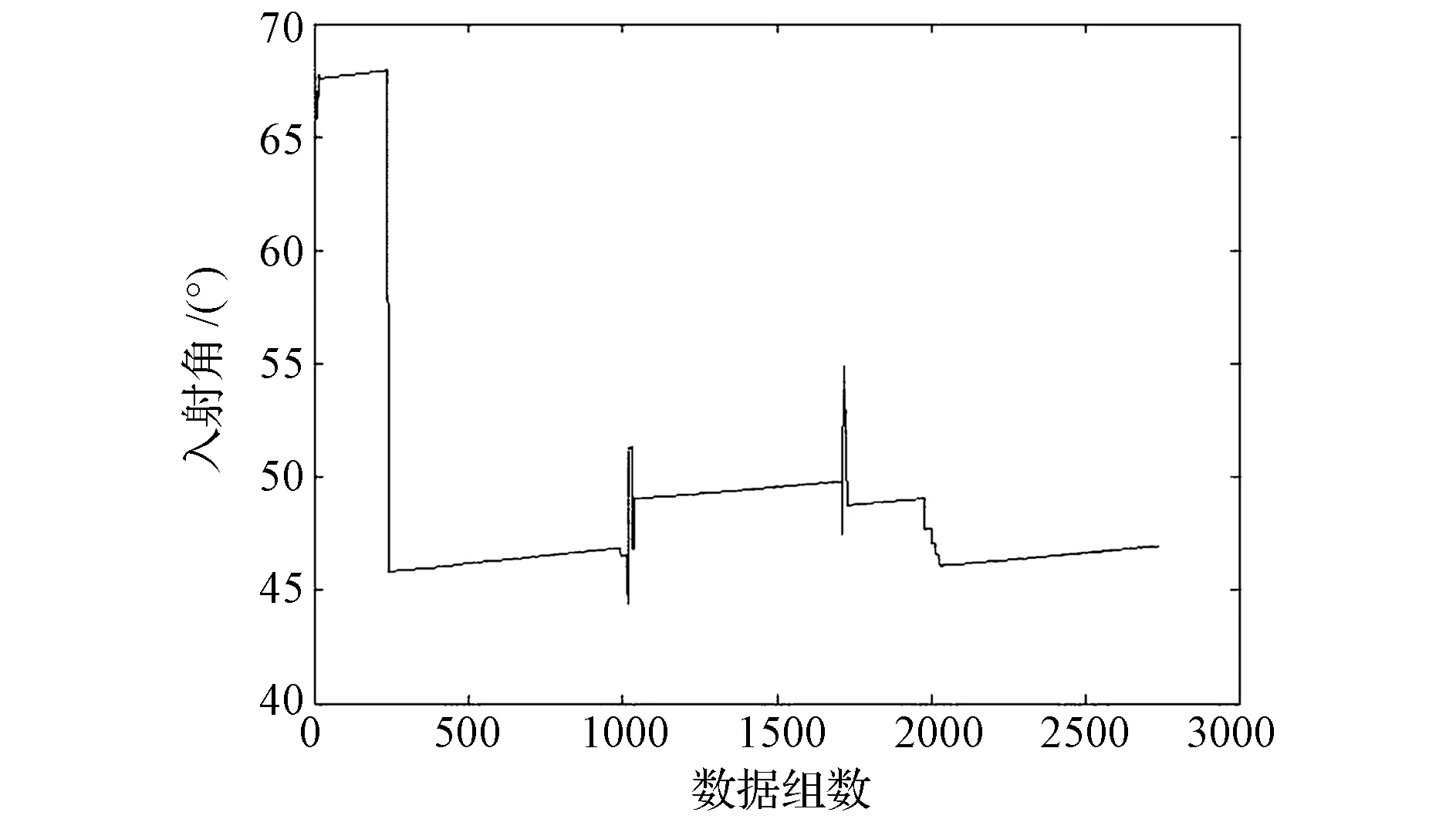
图2 +Y太阳电池阵入射角Fig.2 Incident angle to +Y solar array
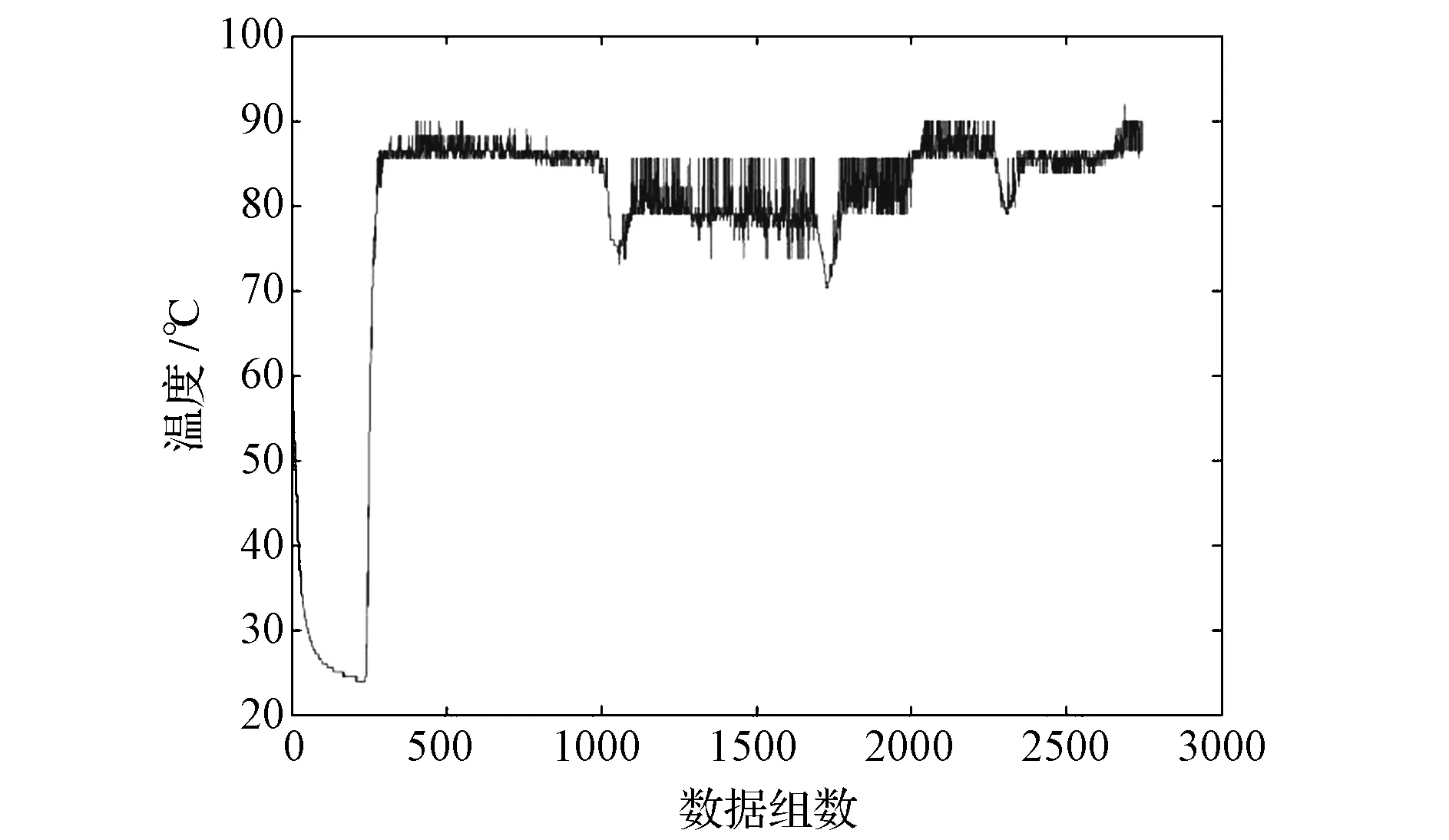
图3 +Y太阳电池阵温度Fig.3 Temperature of +Y solar array
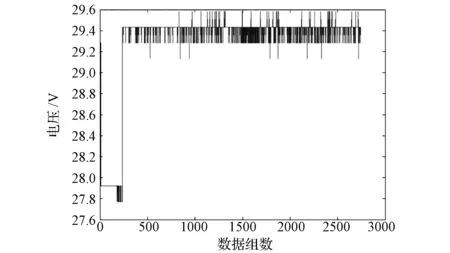
图4 母线电压Fig.4 Bus voltage
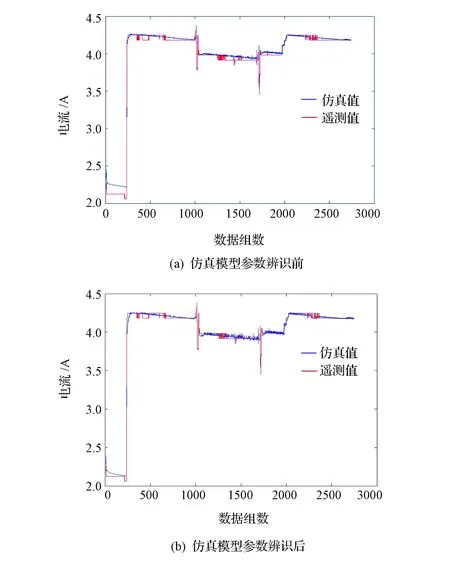
图5 +Y太阳电池阵输出电流的仿真值与遥测值比对Fig.5 Contrast of +Y solar array current between simulation and telemetry data
4.2 仿真模型参数辨识结果验证
为了说明仿真模型参数辨识后结果的合理性,选取另外一个时间段的遥测数据对第4.1节辨识出的参数进行验证[9]。选取2013年12月另外一天的一段遥测数据作为验证样本,将遥测数据中的空值和野值去除,分别计算仿真模型参数辨识前和辨识后的仿真值,并与遥测值进行比对,如图6所示。从图6中可以看出,辨识前和辨识后仿真模型输出值的总体变化趋势与遥测数据保持一致,但辨识前仿真模型输出值和遥测数据的偏差明显大于辨识后两者的偏差。经计算,辨识前,仿真值和遥测值之间的偏差J(ω)为1.72,均值偏差为0.99%;辨识后,J(ω)为0.84,均值偏差为0.26%。可见,辨识后的仿真模型仿真值与遥测值的接近程度更高,J(ω)减小约51%。
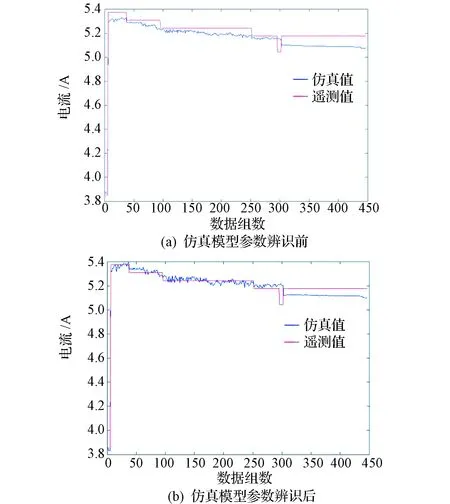
图6 +Y太阳电池阵输出电流的仿真值和遥测值比对(验证样本)Fig.6 Contrast of +Y solar array current between simulation and telemetry data (validation swatch)
验证结果表明,对于另外时间段的数据样本,辨识后的仿真模型仍能使仿真值和遥测值的偏差更小,而且偏差减小的百分比与前文几乎一致,证明了仿真模型参数辨识方法的正确性。
5 结束语
本文应用遗传算法以及月球巡视器在轨遥测数据,对太阳电池阵电性能仿真模型进行参数辨识,使辨识后仿真模型的输出与真实遥测数据更接近,即更能逼近真实硬件系统的在轨工作状态。月球巡视器在轨执行任务时,如果发现仿真模型的输出与真实遥测数据有偏差,可将传回地面的遥测数据作为本文仿真模型参数辨识程序的激励源,快速将仿真模型优化为与在轨硬件系统更接近的状态,这对于太阳电池阵电性能仿真模型在规划验证和伴飞中更精准的预报具有重要意义。本文的太阳电池阵电性能仿真模型参数辨识方法适用于对参数的辨识,而不涉及仿真模型结构的辨识,因此模拟真实系统的仿真模型须要有一定的建模基础,或者假定一种模型结构,使得模型输出与参数相关。这种方法可推广到其他分系统仿真模型的在轨优化,其他分系统可参考本文提出的仿真模型参数辨识条件及方法,开展其仿真模型的在轨辨识。
)
[1]刘金琨,沈晓蓉,赵龙.系统辨识理论及Matlab仿真[M].北京:电子工业出版社,2013
LiuJinkun,ShenXiaorong,ZhaoLong.SystemidentificationtheoryandMatlabsimulation[M].Beijing:PublishingHouseofElectronicsIndustry, 2013 (inChinese)
[2]徐晓冰,王建平,张崇巍.硅太阳电池解析模型分析与参数修正[J].合肥工业大学学报(自然科学版),2009,32(2):512-514
XuXiaobing,WangJianping,ZhangChongwei.Analyticalmodelandparameterrevisingmethodofsiliconsolarcells[J].JournalofHefeiUniversityofTechnology(NaturalScience),2009,32(2):512-514 (inChinese)
[3]MariaCarmelaDiPiazza,GianpaoloVitale.Photovoltaicsourcesmodelingandemulation[M].London:Spring-Verlag,2013 (inChinese)
[4]彭鑫,张玥,杨炀.月球巡视器太阳电池阵电性能仿真模型[J].航天器工程,2015,24(1):70-77
PengXin,ZhangYue,YangYang.Electricalperformancesimulationmodelforlunarroversolararray[J].SpacecraftEngineering,2015,24(1):70-77 (inChinese)
[5]PsiakiML.Estimationofaspacecraft’sattitudedynamicsparametersbyusingflightdata[J].JournalofGuidance,Control,andDynamics,2005,28(4): 594-603 (inChinese)
[6]于登云,夏人伟,孙国江.在轨航天器动力学参数辨识技术研究[J].中国空间科学技术,2008,28(1):13-17
YuDengyun,XiaRenwei,SunGuojiang.Investigationofdynamicparameteridentificationofon-orbitspacecraft[J].ChineseSpaceScienceandTechnology,2008,28(1):13-17 (inChinese)
[7]完备,张震亚,乔兵,等.基于粒子群优化算法的航天器惯性参数辨识[J].机械制造与自动化,2011,41(3):101-104
WanBei,ZhangZhenya,QiaoBing,etal.Identificationofspacecraftinertiaparametersbasedonparticleswarmoptimizationalgorithm[J].MachineBuilding&Automation,2011,41(3):101-104 (inChinese)
[8]任浩.基于遗传算法及神经网络的入侵检测模型研究[D].天津:天津理工大学,2013
RenHao.Researchonintrusiondetectionsystembasedonimprovedgeneticalgorithmandneuralnetworks[D].Tianjin:TianjinUniversityofTechnology,2013 (inChinese)
[9]覃光华,丁晶,陈彬兵.预防过拟合现象的人工神经网络训练策略及其应用[J].长江科学院院报,2002,19(3):61-63
QinGuanghua,DingJing,ChenBinbing.Learningstrate-giesofartificialneuralnetworksforpreventingover-trainingandtheirapplication[J].JournalofYangtzeRiverScientificResearchInstitute,2002,19(3):61-63 (inChinese)
(编辑:夏光)
Parameter Identification Method of Electrical Performance Simulation Model for Lunar Rover Solar Array
PENG Xin LIU Shuhao YIN Jianfeng WANG Qian LI Qingyi
(Beijing Institute of Spacecraft System Engineering, Beijing 100094, China)
Parameter identification of solar array electrical performance simulation model can make the simulation of the on-orbit hardware system more accurate. This paper puts forward the solar array electrical performance simulation model, analyzes the inputs, outputs and initialization parameters, and explains the feasibility of simulation model parameter identification by using genetic algorithm and telemetry data. The general thinking of simulation model parameter identification is put forward which uses telemetry data as exciting source and uses genetic algorithm to identify the parameters. The parameters of simulation model are identified by using telemetry data in a certain time, and the identification result is validated by telemetry data in other time. The experiment and validation results indicate that outputs of the solar array electrical performance simulation model after identification are closer to the corresponding telemetry data. The deviation of the simulation model can be reduced by ~50%. The method proposed can be helpful for the forecast of simulation model in programming validation and accompanying flight.
lunar rover; solar array; electrical performance simulation model; model parameter identification; genetic algorithm; on-orbit telemetry data
2014-07-29;
2015-05-21
国家重大科技专项工程
彭鑫,男,工程师,从事航天器系统仿真工作。Email:pengxin1982@163.com。
TP391.9;O451
A
10.3969/j.issn.1673-8748.2015.04.012
