一次近月制动的误差分析与安全关机策略
2015-03-13董捷周文艳张熇李骥关轶峰
董捷 周文艳 张熇 李骥 关轶峰
(1 北京空间飞行器总体设计部, 北京 100094)(2 北京控制工程研究所, 北京 100190)(3 空间智能控制技术重点实验室, 北京 100190)
一次近月制动的误差分析与安全关机策略
董捷1周文艳1张熇1李骥2,3关轶峰2,3
(1 北京空间飞行器总体设计部, 北京 100094)(2 北京控制工程研究所, 北京 100190)(3 空间智能控制技术重点实验室, 北京 100190)
实施有效的近月制动进入目标环月轨道是实现月球环绕、安全软着陆等任务的前提。文章基于一次近月制动,对点火过程中的主要误差要素影响进行了分析,包括开机与关机方式、点火姿态、有限推力制动方式的影响,其中点火姿态偏差是最大的误差影响。并分析了一次近月制动条件下,由于推力偏差和制动推质比较大,速度增量关机失效时自主时间关机和地面支持关机存在的轨道安全性问题。针对此问题,按近月制动前后的不同阶段设计了3种安全关机策略,包括相关的发动机标定、轨控实时监视干预以及应急提升近月点。最后介绍了安全关机策略在嫦娥三号任务中的应用情况。
近月制动;误差;点火姿态;发动机关机
1 引言
月球探测器典型的探测形式包括飞掠、环绕、着陆、巡视和采样返回。飞掠与直接着陆通常集中在早期月球探测任务中,如苏联的月球1号飞掠任务[1]、苏联的月球2号硬着陆任务[1]、美国的勘测者号[2]软着陆任务等。由于飞掠与直接硬着陆探测成果有限,而直接软着陆方式对转移轨道发射窗口要求严格、着陆区受限[3],所以探测方式逐渐发展为先在近月点附近执行制动完成月球环绕飞行,再开展后续遥感、软着陆等任务。
根据制动推力大小,从降低重力损耗角度考虑,包括一次制动或多次制动。当制动初始推质比(发动机推力与探测器质量之比)能够达到2 m/s2以上时,通常采用一次制动,这类任务集中在月球软着陆探测。由于配置了大推力减速发动机,可以一次制动直接进入环月目标轨道,简化飞行控制程序,如美国的阿波罗系列载人飞船[4]、苏联的“月球”(Luna)系列无人探测器、中国的嫦娥三号、处于规划和研制阶段的俄罗斯“月球-全球”探测器[5]等。当制动初始推质比在2 m/s2以内时,则采用多次制动方式逐渐降低远月点高度,这类任务通常针对环绕月球遥感探测,如美国的“月球勘测轨道器”(LRO)、中国的嫦娥一号、二号。
对于近月制动,如不能及时进行减速控制,探测器将飞离地月系统不再返回,若要形成较为稳定的环月轨道,对应的减速速度增量至少要达到200~300 m/s;如减速过大,将有撞月风险[6];对于制动前近月点高度为100 km的轨道,如果速度增量超出制动所需速度增量20 m/s,控后轨道近月点将接近月面。这决定了近月制动窗口具有唯一性,其控制时机及控制量直接影响任务成败,因此实现近月制动精确控制至关重要。本文针对一次近月制动中的各项控制误差影响进行了分析,提出了应对安全关机风险的策略,最后介绍了嫦娥三号任务的在轨应用情况。
2 一次近月制动的误差源分析
2.1 近月制动控制目标
近月制动后的核心目标是保证探测器的轨道高度、轨道倾角满足任务要求,在故障情况下能确保轨道的安全性。对于采用一次制动实现的月球软着陆任务,对近月制动后的轨道高度要求并不严格,一般不超过±50 km。保证轨道倾角的目的,是为了实现月面目标区域的可达性,只要近月制动后轨道倾角大于着陆区纬度[7],就可以到达目标着陆区。只要着陆区范围不是严格的月球两极区域,综合轨控精度、环月轨道摄动对环月倾角的影响,选择极轨轨道对两极区域具有可达性,轨道倾角误差允许范围通常不大于±5°。
以2017年5月发射窗口为例,开展近月制动各种误差影响分析。选择标称地月转移轨道转移时间为112 h,到达月球时的近月点高度为100 km。在地心(第一)赤道坐标系[8]下,与运载火箭分离时的标称器箭分离参数见表1。

表1 地月转移轨道器箭分离参数
本文假设研究的环月轨道在月心坐标系下主要参数及偏差如下。
(1)近月制动后目标轨道:半长轴1 837.4 km,相对于月球平均半径(1 737.4 km)的高度为100 km,制动后允许轨道偏差±30 km(不含最后一次中途修正的误差影响、近月制动前的轨道预报误差);
(2)制动后目标轨道倾角90°,允许偏差±5°;
(3)近月制动脉冲速度增量843 m/s;
(4)探测器发动机标称推力6000 N,推力偏差3%;
(5)制动前探测器初始质量3000 kg,质量预计偏差0.5%;
(6)发动机比冲为308 s,比冲偏差取1%。
对应近月制动时探测器的初始推质比达到了2 m/s2,可以采用一次制动策略,这也与阿波罗飞船、嫦娥三号探测器制动初始推质比接近。
2.2 近月制动开关机影响
近月制动过程中,发动机开、关机时机设计尤为重要,一方面关系到制动点火所需速度增量,会影响推进剂消耗;另一方面影响控后轨道,如设计不合理,将造成控后无法环月或近月点高度过低发生撞月。
1)发动机开机
在执行轨道控制前,地面需提前注入探测器上轨道控制参数(包括点火开始时刻、速度增量、目标姿态等),探测器上判断点火时刻到后自主发出发动机开机指令。
为提高有限推力制动的效率,推力弧段中心时刻选择为地月转移轨道近月点时刻。根据环月目标轨道、发动机推力、比冲和探测器质量进行制动过程有限推力计算,确定点火开始时刻和速度增量。
发动机开机的准确度与星时精度、星上的控制周期相关,通常综合误差在百毫秒量级以下。反映了点火中心时刻偏离近月点时刻的偏差。
2)发动机关机
发动机的关机方式包括3种,即由探测器自主执行的速度增量关机、时间关机,以及在地面判断关机无效时的地面支持关机。为了保证变轨精度,正常条件下是依靠速度增量实现发动机关机,并以时间关机作为加速度计异常等特殊条件下的关机手段。地面支持关机指的是在地面判断出发动机未正常关机后,由地面发送关机指令。
(1)速度增量关机:探测器上根据加速度计测量数据计算速度增量变化,当判断速度增量达到要求后,自主发出发动机关机指令。这种关机方式,精度较高,沿推力方向的误差大小主要包括加速度计误差、传输时延(控制周期量化及串口传输时延)和关机后效三部分。对应的误差模型如下:
(1)

(2)时间关机:一般在加速度计故障等异常条件下,作为速度增量关机手段的备份。变轨过程中,如果依据速度增量关机未正常执行,探测器上计算到达允许的最长点火时间后,将自主发出发动机关机指令。最长点火时间设计过小,可能在正常速度增量关机前发出关机指令,增大变轨偏差;设计过大,当速度增量关机失效时,无法保证在“撞月”前发出关机指令。时间关机误差与加速度计误差无关,而与发动机推力偏差直接相关。则对应的误差模型如下:
Et=F/m×(ΔTf+td)
(2)
式中:Et为自主时间关机总的速度增量误差,ΔTf为计算的最长点火时间与实际点火时间之差。
如果要保证探测器自主时间关机有效,ΔTf至关重要。最长点火时间的计算公式如下:
(3)
(4)
式中:Tf为最长点火时间,m0为探测器初始质量,mf为点火过程中推进剂消耗情况,Isp为比冲,ΔV为速度增量。
则在ΔV相对固定条件下,最长点火时间与初始质量、推力、比冲相关,Tf可以表示为
Tf=f(m0,F,Isp)
(5)
在m0、F、Isp偏差较小时,相对于标称点火时间的偏差可采用如下公式计算:
(6)
式中:Δm0、ΔF、ΔIsp分别为m0、F和Isp的偏差量。
因此,预计的探测器初始质量偏差、发动机推力偏差和比冲偏差都对预计的最长点火时间有影响。为了提高自主时间关机的精度,必须尽可能缩小m0、F和Isp这3个量的偏差值。
(3)地面支持关机:由地面介入的备份手段,以进一步提高关机可靠性,保证轨道安全,不发生撞月。为保证地面支持关机有效,在经历地面遥测判读、处置及地面上行执行的总时间(设为ΔTz)后,其带来的速度增量误差应不大于轨道安全所允许的极限值。对应的误差模型如下:
Ez=F/m×ΔTz+F/m×td
(7)
式中:Ez为地面支持关机总的速度增量误差。
由于ΔTz相对固定,在正常关机时刻后探测器推质比越小,制动速度增量增加越慢,地面支持关机越能最大程度地发挥作用。
2.3 点火姿态影响
点火姿态的设计包括沿推力方向和垂直于推力方向两部分。直接影响变轨效果的是沿推力方向,垂直于推力方向用于保证星敏感器的正常使用(姿态基准丢失时可以快速获取惯性姿态)。
目前,探测器具备在轨控时推力方向沿惯性空间固定和匀速转动两种能力[9]。固定推力方向较匀速转动制动速度增量大,但对于大推质比制动的探测器,速度增量相差仅几米每秒。而较固定推力控制,匀速转动控制会增大轨道高度偏差,降低轨道安全性,并增加后续进入目标轨道修正量;匀速转动控制时探测器惯性姿态不断变化,控制策略复杂,在轨监视时也不易进行故障诊断。为提高可靠性和降低复杂度,月球软着陆探测器近月制动通常设计采用固定推力方向控制。为提高制动效率,惯性空间的推力方向选择为地月转移轨道近月点时刻速度的反方向。
定义标称点火姿态下,探测器质心坐标系三轴指向如下:探测器X轴沿标称推力方向,即X轴沿地月转移轨道近月点时刻速度的反方向,Y轴垂直于X轴,与轨道面法线方向一致,Z轴与X轴和Y轴构成右手坐标系。
由于绕推力方向的角度误差不影响制动结果,因此模型可以定义为沿垂直于推力方向的两个轴的角度误差。设绕Y轴的角度误差为α,绕Z轴的角度误差为β。
根据前面分析条件,标称点火姿态四元数见表2(相对于J2000月心坐标系)[8]。

表2 点火姿态(惯性空间定向)
其中,四元数定义[10]为:设特征轴单位矢量为e,转角为φ,四元数q=(q0,q1,q2,q3)定义如下
(8)
3 误差影响仿真分析
3.1 固定推力方向的控后轨道
根据前面计算的输入条件标称值,计算的控后轨道参数为:
(1)点火时间:369.3 s;
(2)总速度增量:846.9 m/s;
(3)推进剂消耗量:733.6 kg。
(4)相对于平均月球半径的近月点高度:92.5 km,远月点高度:107.5 km。
(5)控后探测器质量:2 266.4 kg。
(6)重力损耗;(846.9 m/s-843 m/s)/843 m/s=0.46%。
可见,在不含其它误差条件,点火方向沿近月点反方向的点火策略下,由于有限推力控制,近月点高度误差为7.5 km。
由于近月制动推质比大,实际变轨重力损耗相对于脉冲变轨比例小于1%,一次制动的推进剂代价很小。
3.2 控后轨道的误差分析
3.2.1 开机延迟影响
目前,星载计算机的控制周期通常不大于160 ms,星时误差不大于20 ms,开机时延不超过20 ms(信号传输时间10 ms、阀门动作时间10 ms),则总的开机时间延迟最长为200 ms。在其它参数没有误差的条件下,对应的控后轨道高度为近月点92.53 km,远月点107.05 km。
可见在延迟200 ms开机的条件下,对控后轨道的影响相对较小,高度误差小于1 km。
3.2.2 速度增量关机误差影响
加速度计测量精度与推质比大小相关,对于初始推质比为2 m/s2,典型的加速度计测量精度优于1×10-3m/s2;传输时延包括控制周期160 ms、信号传输时间10 ms、阀门动作时间10 ms,则根据前面介绍的误差模型,计算的速度增量误差Ev=0.848 2 m/s。则对应的控后轨道参数为近月点90.09 km,远月点105.73 km。
可见在正常速度增量关机误差条件下,对控后轨道的影响也相对较小,近月点高度误差小于2.5 km,远月点高度误差小于2 km。
3.2.3 姿态控制误差影响
根据前面姿态偏差的定义,分别对两个轴方向误差为1°,2°和3°的情况进行分析(见表3)。
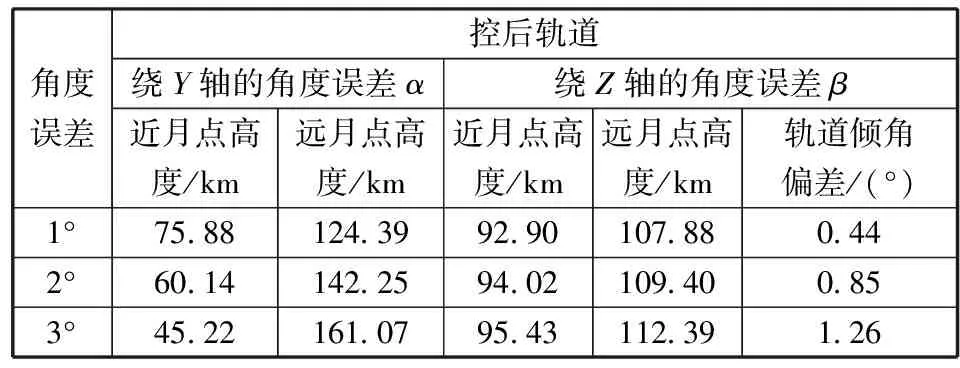
表3 姿态控制误差对制动后轨道的影响
注:上述姿态偏差按相对保守的方法取单方向固定值,实际变轨姿态偏差会在两个方向周期性变化。
可见,随着轨道平面内的姿态角偏差α不断增大,轨道近月点高度将快速降低,α角误差在1°时,轨道高度误差就达到25 km;这主要是由于平面内误差影响轨道偏心率,造成轨道高度偏差增大,特别是近月点高度迅速降低,会危及轨道安全。平面外姿态偏差β主要影响轨道倾角,由于轨控速度增量偏差与探测器相对月球的运动速度是小量,因此合成后对轨道倾角的影响相对较小。
综合以上分析,轨控时的姿态控制误差应该控制在1°以内。
3.3 非正常关机的近月制动后轨道
3.3.1 自主时间关机误差影响
根据前面的分析,自主时间关机速度增量误差Et=36.2 m/s。
不同延迟关机时间下对应的轨道近月点高度变化见表4。可见,自主时间关机速度增量误差明显大于安全高度允许的速度增量,这样自主时间关机无法发挥作用。只有减小发动机推力偏差才能提高自主时间关机的有效性。
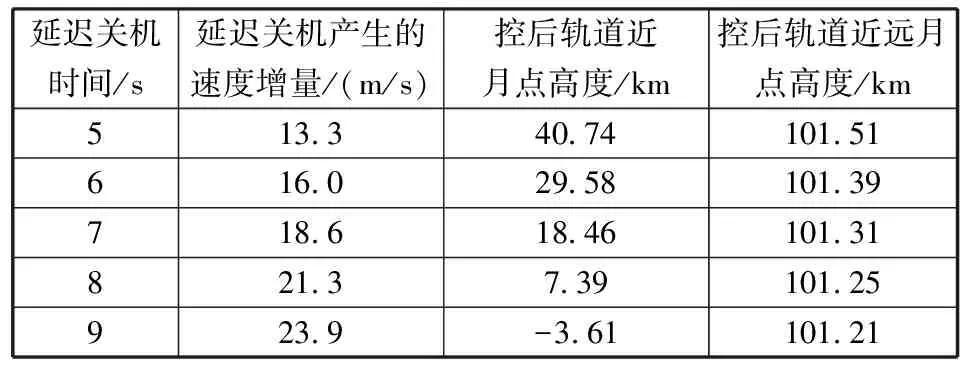
表4 延时关机时间与轨道近月点高度的变化
3.3.2 地面支持关机的误差影响
与自主时间关机相似,按照允许延迟关机1 min进行分析,计算的地面支持关机速度增量误差Ez=159.3 m/s。由表4可见,显然无法满足近月点高度要求。经分析,只有对应延迟关机后的推质比小于0.3 m/s2时,才能满足地面支持关机的安全性要求。
针对月球环绕探测任务,如我国的嫦娥一号[11]、嫦娥二号[12]和美国的LRO[13],这些探测器推质比小,只能采用多次近月制动降低重力损耗;但恰恰由于该特点,延迟关机后至少有1 min以上的时间近月点才处于月球平均半径以下,地面有相对充足的应急处置时间,关机安全性的风险相对较低。
对于月球软着陆这类大推质比任务,由于延迟关机后近月点将快速处于月球以下,地面是无法支持再次关机的。美国阿波罗飞船这类载人任务从轨道安全性考虑采用了地月自由返回轨道,近月制动时只能处在月球背面,受月球遮挡地面无法支持关机,但可以由飞船上宇航员实时监视支持[14];而对于苏联Luna任务,目前公开的文献并没有针对关机可靠性问题给出明确的策略,只能依赖速度增量关机。
3.4 误差影响分析
综合以上误差分析,在正常速度增量关机方法下,在开机延迟、速度增量关机误差、点火姿态三项因素中,点火姿态影响最大,因此需要将姿态控制误差控制在1°以内。综合开机延迟、速度增量误差、有限推力点火制动以及点火姿态误差后的轨道误差如下,满足要求的控后最大30 km的偏差要求。
(9)
式中:ΔEh1为有限推动力制动产生的高度误差,ΔEh2为开机延迟产生的高度误差,ΔEh3为速度增量关机误差产生的高度误差,ΔEh4为点火姿态误差(1°)产生的高度误差。
在速度增量关机失效的情况下,受较大的推力偏差和制动推质比影响,自主时间关机与地面支持关机都无法保证轨道安全,因此必须要设计相应的安全关机策略。
4 安全关机策略设计
针对自主时间关机和地面支持关机存在的问题,可以按阶段在近月制动前、中、后期设计三种策略以提高关机安全性,避免在速度增量关机失效的情况下发生撞月。
4.1 近月制动前制动发动机的标定
设探测器正常关机时刻至距月面安全高度时刻的时间为T。为使自主时间关机时,探测器近月点仍在安全高度以上,要求根据推力偏差计算的最大和最小点火时间差(设为ΔT)小于T,即以最大推力按最长时间点火后仍能使近月点处于安全高度以上。
表5对影响自主时间关机的三个因素进行了分析,主要因素是发动机推力大小,准确获取发动机的常值推力偏差可以有效缩短ΔT的大小。受地面对发动机推力标定手段的限制,地面无法通过热标试验准确标定在轨发动机的推力大小,存在较大的常值偏差,通常都在±3%以上。因此近月制动前的策略是利用地月转移过程中途修正的机会,对用于近月制动的大推力发动机推力大小进行标定。
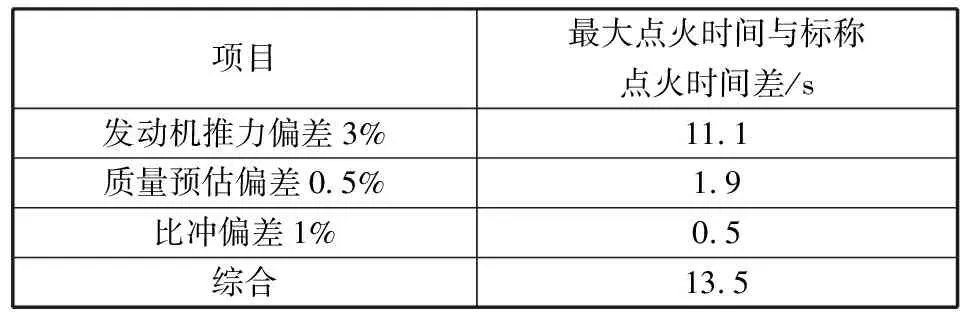
表5 自主时间关机不同误差对最大点火时间的影响
随着运载火箭制导能力的提升,深空探测器的入轨精度不断提高,所需要的中途修正量可能很小;而标定大推力发动机,需要使发动机推力处于稳定工作阶段,这样点火时间就需要尽可能长,考虑大推力发动机流量大,必然会带来推进剂的大量消耗。因此需要在兼顾中途修正需求与优化推进剂消耗两方面进行平衡开展发动机推力标定策略设计。
策略的首要目标是先保证发动机的最短标定时间,在此基础上设计各次中途修正点火策略,具体如下:
(1)当第1次或第2次中途修正满足大推力发动机最短标定时间要求时,直接采用大推力发动机进行修正。
(2)当中途修正速度增量小于发动机最短标定时间时,进行两次中途修正组合设计,即第1次中途修正使用推力器点火进行小速度增量轨道拉偏,满足第2次修正采用大推力发动机的最短标定时间要求。
通过以上优化修正策略,在满足大推力发动机点火标定最短时间的条件下,使修正速度增量最小。在近月制动前获得发动机推力标定结果后,再考虑较小的随机偏差,计算近月制动最大点火时长并注入探测器上执行。
4.2 近月制动中判断评估撞月风险
该策略的基本思路是在近月制动轨控中,可以由地面判断轨控工作状态进行实时干预,具体策略为:
(1)首先根据发动机最大的推力偏差得到最短点火时间和最长点火时间,结合点火时刻得到预期的最早关机时刻和最晚关机时刻。
(2)在点火过程中,探测器上根据实时计算的剩余点火速度增量等信息,自主计算剩余点火时间。在点火开始一定时间后,根据已知的点火时刻实时预测关机时刻是否处于最早关机时刻与最晚关机时刻之间的预期范围,如不处于该范围,说明发动机推力异常或者是加速度计输出结果异常。这时地面可以发送指令,实现在指定时刻(即最早关机时刻)向探测器上注入关机指令提前关闭发动机,以保证探测器处于安全轨道高度。如果关机时刻始终处于预期范围,地面则不加干预,由探测器上自主实现正常的速度增量关机。
4.3 近月制动后发现撞月风险时的控制策略
该策略的基本思路是在正常轨控点火时间之后,快速调整姿态,调整点火方向以加速抬高轨道。
在地面发现点火时间超过预期,若仅发送关机指令,近月点高度仍将处于月面以下,因此需要尽快调整姿态至轨道加速方向,以抬高近月点高度。软着陆任务探测器上为了平衡大推力造成的干扰力矩,通常需要推力器和力臂的组合设计提供足够的姿态控制力矩,这种方式可以使姿态调整角速度达到几度/秒,为及时处置提供了有利的配置保障。
具体策略如下:
近月制动时如发动机未实现正常关机,制动点火速度增量超出所需速度增量,探测器轨道近月点将低于月面,必须紧急进行故障处置。具体故障处置的方法是关机后根据探测器上遥测“剩余速度增量(ΔVs)”进行是否处置的判断。
(1)如额外增加的速度增量大于允许阈值(ΔV)则必须立即进行应急处置,通过调整探测器姿态,使探测器由制动减速姿态调整为加速姿态进行变轨,提高轨道近月点高度。开机变轨越早撞月风险越小,所需的速度增量代价也越小,因此必须尽快完成处置。
(2)如额外增加的速度增量不大于ΔV,近月点高度满足安全高度,由于在一天内月球摄动对轨道高度的影响不危及安全性,制动后不进行应急故障处置,进行正常轨控后的状态恢复和设置。并根据控后定轨数据判断轨道偏差,选择是否安排第二天进行轨道修正。
5 在轨验证
嫦娥三号在轨采用了软着陆使用的7500 N大推力发动机进行近月制动,对一次近月制动策略进行了验证。
1)近月制动前
为了标定7500 N发动机在轨推力,确保近月制动安全,嫦娥三号在飞行程序中安排了用7500 N发动机进行中途修正的飞行事件。探测器发射入轨精度高,因此于2013年12月2日进行了第一次中途修正轨道拉偏,于2013年12月3日第二次中途修正时采用了7500 N推力,修正时长为标定所需的最短时间,对稳态推力进行了精确标定,修正了发动机地面热标数据,使近月制动时间关机参数的设置更为准确。2013年12月6日,嫦娥三号完美完成近月制动。近月制动实际开机时长与标称时长差小于2 s,证明了推力标定的有效性。
2)近月制动过程中
点火过程中实时预测的点火时刻始终处于允许误差范围内,如图1所示,因此未执行轨控过程中特定时刻关机的策略。控后轨道半长轴1 835.12 km(目标半长轴1 835.08 km)、轨道倾角89.92°(目标倾角90°),满足后续着陆任务需求。点火过程中姿态控制精度优于0.8°,地面对点火速度增量中的后效误差进行了有效补偿,实现关机精度优于0.1 m/s,在考虑近月点轨道预报误差后,近月制动综合的轨道高度偏差不大于10 km。
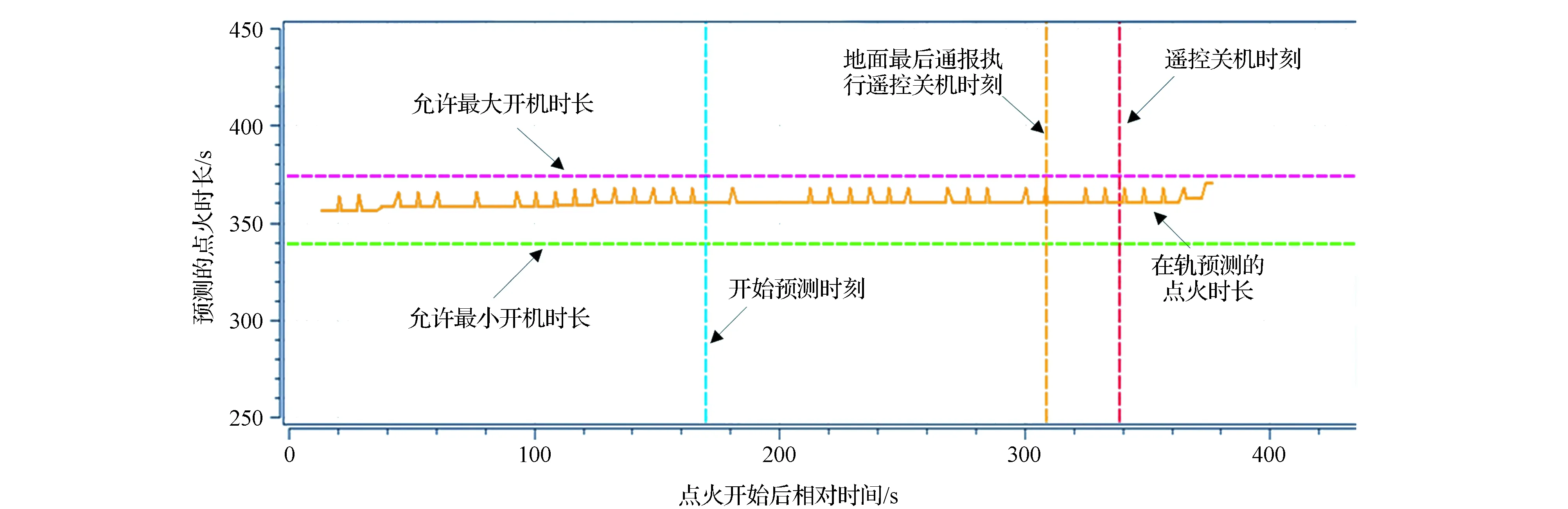
图1 近月制动地面关机时刻监视Fig.1 Monitoring of engine shutdown under braking at perilune
由于近月制动顺利完成,4.3节的应急抬高轨道控制不需要执行。但为了保证对该策略进行充分验证,任务前经过了全数字仿真分析,在此基础上探测器系统与北京飞行控制中心还开展了多次故障协同演练。利用地面动力学计算机仿真在轨动力学环境,制导导航与控制(GNC)、数管等关键分系统采用与星上设备相同的软硬件产品开展了1∶1闭环模飞,充分验证了对策的有效性。
6 结束语
本文对一次近月制动过程中的各项轨道控制误差进行了分析,归纳了最为关键的误差源,提出了对主要误差源点火姿态的要求。针对速度增量关机失效条件下,由于推力偏差大及推质比大带来的一次近月制动关机风险,分别在近月制动前、中、后设计了相应策略。近月制动前通过中途修正进行推力标定,使自主时间关机参数设置更为准确;近月制动过程中设计实时预测并评估判断点火关机时刻的方法,使地面有手段在制动过程中及时干预;根据发动机地面热标和第一次中途修正的数据,通过减小点火速度增量补偿了关机后效,从而进一步降低了控制误差;在近月制动后,充分利用了自身大推力器可提供大角速度的优势,设计调姿加速对策防止延迟关机引起的近月点高度快速降低。
该策略经过了嫦娥三号的在轨验证,在国内首次采用一次近月制动进入目标轨道,优化了飞控程序,为圆满完成任务奠定了坚实基础。
References)
[1]郗晓宁,曾国强,任萱,等.月球探测器轨道设计[M].北京:国防工业出版社,2001:23-34
Xi Xiaoning, Zeng Guoqiang, Ren Xuan, et al. Orbit design of lunar probe[M]. Beijing: National Defense Industry Press,2001:23-34 (in Chinese)
[2]褚桂柏,张熇.月球探测器技术[M].北京:中国科学技术出版社,2007:128-129
Chu Guibai,Zhang He.Lunar probe technology[M].Beijing: China Science and Technology Press,2007:128-129 (in Chinese)
[3]杨嘉墀.航天器轨道动力学与控制(下)[M].北京:中国宇航出版社,2005:348
Yang Jiachi.Spacecraft trajectory dynamics and control[M].Beijing:China Astronautics Press, 2005:348 (in Chinese)
[4]Interbartolo, Michael A.Apollo mission techniques lunar orbit activities-Part 1a, NASA 20090015331[R].Washington D.C.:NASA,2009
[5]鲁暘筱懿,平劲松.V Shevchenko.俄罗斯“月球-全球”和“月球-资源”探月任务[J].航天器工程,2013,22(4): 103-108 (in Chinese)
Lu Yangxiaoyi, Ping Jinsong,V Shevchenko.Russian lunar exploration missions:LUNA-Glob & LUNA-Resource[J]. Spacecraft Engineering, 2013,22(4): 103-108 (in Chinese)
[6]吴伟仁,周建亮,高薇.绕月探测卫星飞行控制[M].北京:中国宇航出版社,2012:134-135
Wu Weiren,Zhou Jianliang,Gao Wei. Flight control of lunar orbiting satellite[M].Beijing:China Astronautics Press, 2012:134-135 (in Chinese)
[7]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,1998:18
Zhang Renwei. Dynamics and control of satellite orbit and attitude [M].Beihang University Press,1998:18 (in Chinese)
[8]张旭辉,余梦伦,茹家欣.QJ 1028B-2008 航天产品常用坐标系[S].北京:国防科学技术工业委员会,2008
Zhang Xuhui,Yu Menglun,Ru Jiaxin. QJ 1028B-2008 General coordinate for astronautics product[S].Beijing:Commission of Science,Technology and Industry for National Defense,2008 (in Chinese)
[9]李铁寿.一种减少航天器重力损失的变轨方法:中国,200710301743.2[P].2008-05-28
Li Tieshou.A maneuver methord for reducing gravity losses:China, 200710301743.2[P].2008-05-28 (in Chinese)
[10]谭维炽,胡金刚.航天器系统工程[M].北京:中国科学技术出版社,2009:44
Tan Weichi,Hu Jingang.Spacecraft systems engineering[M].Beijing:China Science and Technology Press, 2009:44 (in Chinese)
[11]杨维廉,周文艳.嫦娥一号月球探测卫星轨道设计[J].航天器工程,2007,16(6):16-24
Yang Weilian,Zhou Wenyan. Chang’e-1 lunar trajectotry design[J].Spacecraft Engineering,2007,16(6):16-24 (in Chinese)
[12]周文艳,杨维廉.嫦娥二号卫星轨道设计[J].航天器工程,2010,19(5):24-28
Zhou Wenyan, Yang Weilian. Chang’e-2 lunar trajectotry design[J].Spacecraft Engineering,2010,19(5):24-28 (in Chinese)
[13]Ann Nicholson. NASA GSFC Lunar Reconnaissance Orbiter (LRO) orbit estimation and prediction,AIAA 2010-2328[R].Washington D.C.:AIAA,2010
[14]Berry R L,Wiley R F.Real-time targeting for the Apollo lunar orbit insertion maneuver, NASA-TM-X-69759[R].Washington D.C.:AIAA,1968
(编辑:李多)
Error Analysis and Safe Shutdown Strategy Design for One Braking at Perilune
DONG Jie1ZHOU Wenyan1ZHANG He1LI Ji2,3GUAN Yifeng2,3
(1 Beijing Institute of Spacecraft System Engineering, Beijing 100094, China (2 Beijing Institute of Control and Engineering, Beijing 100190, China) (3 Science and Technology on Space Intelligent Control Laboratory, Beijing 100190, China)
For critical missions such as orbiting exploration of and soft landing on the moon, a braking at perilune is the prerequisite. This paper analyzes the main error factors, including firing and shutdown forms of the engine, firing attitude, and influences of finite thrust braking on ignition process under one braking at perilune condition. By comparison and analysis, it concludes that the firing attitude error is the biggest error source. It also indicates the potential safety hazard of the autonomous delay shutdown and ground control shutdown process due to the big thrust bias and thrust-mass ratio of braking, when velocity increment shutdown fails. The safe shutdown strategy in different stages of braking at perilune is designed to resolve the problem mentioned above, including engine calibration, maneuver real-time monitoring and ascending perilune in emergency. Finally the in-orbit utilization of safe shutdown strategy for Chang’e-3 lunar probe is introduced.
braking at perilune; error; firing attitude; engine shutdown
2014-12-05;
2015-05-15
国家重大科技专项工程
董捷,男,工程师,从事深空探测器总体设计工作。Email:donghn13@163.com。
V476.3
A
10.3969/j.issn.1673-8748.2015.04.003