基于MSP430单片机的伺服电机控制系统的研究
2015-03-12李彩菊中国船舶重工集团公司第七一研究所湖北宜昌443003
李彩菊(中国船舶重工集团公司第七一〇研究所,湖北宜昌 443003)
基于MSP430单片机的伺服电机控制系统的研究
李彩菊
(中国船舶重工集团公司第七一〇研究所,湖北宜昌443003)
摘要:介绍了一种基于MSP430单片机控制交流伺服电机的方案设计。该设计以MSP430单片机作为核心控制器,包括硬件设计和软件设计,能够实现对交流伺服电机转速的平稳控制。该设计在深度模拟系统中取得了成功应用,通过电机转动带动加压机构可在高压釜内模拟限定值内的任意深度环境。
关键词:MSP430单片机;交流伺服电机;转速控制;深度模拟系统
0 引言
交流伺服电机具有体积小、重量轻、精度高、大转矩输出、较强的过载能力[1]和良好的控制性等优点,已被广泛应用于自动控制系统和自动检测系统中[2]。交流伺服电机的作用是把控制电压转变为电动机轴上的角速度或角位移输出,因此可采用单片机及其配套外围模块实现对伺服电机的模拟量控制。
本设计采用美国德克萨斯仪器公司的超低功耗16位单片机MSP430F1611作为控制核心,利用其丰富的片内资源,实现了对交流伺服电机转速的平稳控制及人性化设计,且成本较低。将该设计应用于深度模拟系统中,通过单片机控制伺服电机驱动器,电机带动加压机构,实现了在高压釜内模拟限定值内的任意深度环境。将被试品安装于盛满水的密闭高压釜内,通过上位机发送加压指令,单片机控制伺服电机驱动器,使高压釜内达到设定压力,这样即将被试品周围模拟成了一定深度(压力)的水压环境。
1 总体方案设计
设计选用松下A5系列高惯量、小容量三相交流伺服电机,及配套速度控制驱动器,所选旋转式编码器为20位增量式编码器,通过单片机控制器输出模拟电压控制驱动器实现对伺服电机转速的控制。
上位机用于给单片机发送控制指令并实时显示单片机反馈信息。在深度模拟系统中,上位机给单片机发送加压、泄压、停止及参数设置等一系列控制指令,并实时显示高压釜内压力值。单片机控制器接收上位机控制指令和操作面板活塞复位指令,进行分析结算,输出模拟电压值;伺服电机驱动器根据电压信号控制伺服电机运转;驱动器接收编码器产生的反馈信号,根据反馈值与目标值比较结果,调整电机转动的角速度,从而实现对交流伺服电机的闭环控制。操作面板的作用是对整个系统进行电源控制,并控制电机使能、活塞复位和清除报警。保证系统能在紧急情况下迅速制动,确保了使用安全。交流伺服电机控制系统组成框图如图1所示。

图1 控制系统组成框图
图1中,加入虚线框内的加压机构、高压釜和压力传感器即构成深度模拟系统。压力传感器监测压力釜内的压力,MSP430单片机控制器定时读取压力传感器,通过PID算法解算,输出模拟电压值,继续控制伺服电机驱动器,通过电机转动带动加压机构使高压釜内压力变化;并将高压釜内的压力转换为深度实时传送给上位机显示;如此循环反馈,直到压力釜内的压力达到上位机设定值,则完成加压过程。加压的时间可通过调节伺服电机驱动器参数完成。泄压过程与加压过程类似,通过控制电机正反转完成,从而实现了在高压釜内模拟限定值内的任意深度环境。
2 系统硬件设计
2.1单片机控制器的硬件设计
单片机控制器是基于单片机MSP430F1611而设计的,是本系统的核心部分,其主要功能是:接收上位机发送的控制指令和操作面板指令,解析指令,对伺服电机的转速进行控制。在深度模拟系统中,单片机控制器的主要功能有三:一是与上位机进行RS232串口通信,接收指令并反馈当前压力釜内的压力值;二是与压力传感器进行RS485串口通信,读取压力传感器压力值;三是通过PID算法,计算控制电压,并控制DA芯片将单片机计算的模拟电压转换为电机驱动器所需模拟电压。所用单片机功能有串口通信、定时中断、输入/输出等。单片机控制器电路如图2所示。
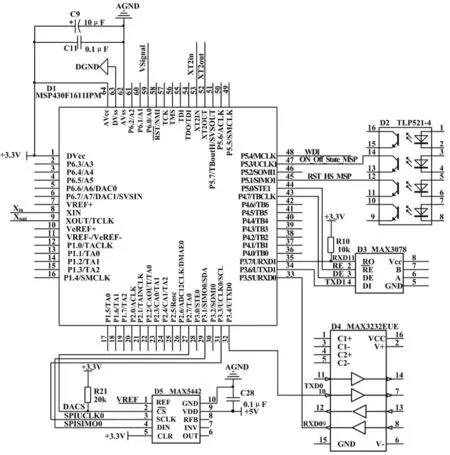
图2 单片机控制器电路
本设计所选单片机MSP430F1611具有两个串口通信模块USART0和USART1,该模块既可以作为UART使用,提供异步通信功能,也可以作为SPI使用,提供同步通信功能。在深度模拟系统中,单片机控制器利用两个串口通信模块的异步通信功能,一个通过芯片MAX3232与上位机进行RS232串口通信;另一个通过芯片MAX3078与压力传感器进行RS485串口通信,读取压力传感器压力值。操作面板复位指令为+24 V电平,通过电平转换芯片TLP521转换成单片机所需的+3.3 V电平,该电平转换芯片TLP521为东芝光隔芯片,不仅可以进行电平转换,还对输入、输出信号具有隔离作用。
单片机MSP430F1611具有12位DA转换模块DAC12,为提高转换精度,本设计选择专用DA转换芯片MAX5442,该芯片具有16位转换精度,且转换速度较快[3]。单片机通过I/O引脚P2.7、P3.1 和P3.3进行控制,既可以通过配置串口通信模块USART0进行SPI同步通信,也可以通过模拟I/O的方式进行控制。在深度模拟系统中,因两个串口通信模块都已经被利用,因此采用模拟I/O的方式对芯片MAX5442进行控制。单片机I/O口输出0~3.3 V数字电压信号,通过DA转换电路和低通滤波器输出-5 V~+5 V模拟电压信号,提供给电机驱动器。DA控制电路如图3所示。
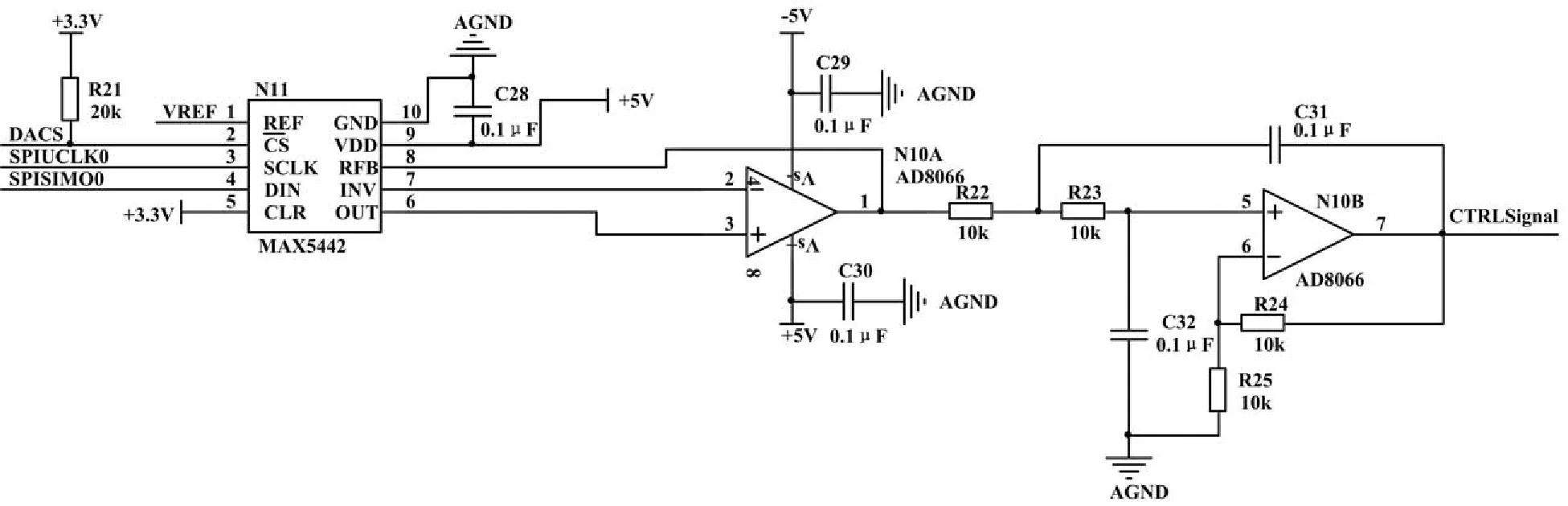
图3 DA控制电路
图3中,网络标号DACS、SPIUCLK0和SPISI⁃MO0为单片机提供的控制信号,VREF为2.5 V参考电压。单片机I/O口输出数字电压经DA芯片MAX5442,再经运算放大芯片输出-2.5 V~+2.5 V模拟电压信号,最后经过增益为2的低通滤波器则可输出-5 V~+5 V模拟电压信号。
2.2伺服电机驱动器接口设计
伺服电机驱动器的接口设计主要包括连接器XA、XB、X6和X4的连接。其中XA为主电源和控制电源输入接口;XB为电机接口,为电机输出三相电源;X6为编码器接口;X4为信号接口,其接线原理图如图4所示。
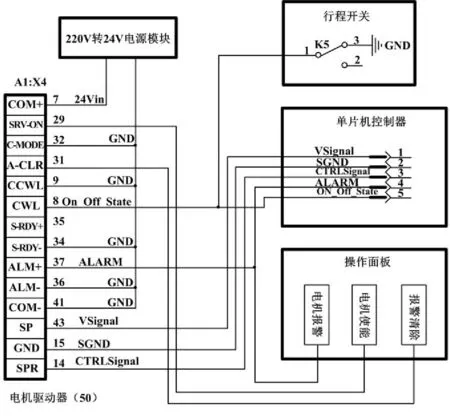
图4 电机驱动器X4连接器接线原理图
图4中,网络标号CTRLSignal为单片机控制器输出的电机速度控制信号;VSignal为电机驱动器反馈的速度信号,单片机控制器接收并采集,作为备用;On_Off_State为行程开关状态信号,电路设计的该初始状态为低电平,接电机驱动器反向驱动禁止输入端CWL,电机驱动器正向驱动禁止输入端CCWL也接低电平,则电机可正向转动也可以反向转动。在深度模拟系统中,电机反向转动带动加压机构减压,如果碰到行程开关,则行程开关状态信号On_Off_State变为高电平,电机立刻停止反向转动。当电机驱动器报警时,信号ALARM会传到操作面板通过红色指示灯形象显示,同时传给单片机控制器,单片机控制器反馈给上位机,清除报警后,按操作面板的报警清除按钮,电机驱动器会停止报警。
伺服电机驱动器有一系列的参数,通过对这些参数的设置和调整,用户可以改变伺服系统的功能和特性。为了确保系统按照既定的方式运行,需要先对电机驱动器恢复出厂设置,然后对其相关参数进行设置。
2.3操作面板设计
操作面板的作用是保证系统能在紧急情况下迅速制动,确保使用安全,并对系统的运行状态进行简单指示。在深度模拟系统中,操作面板设计有电源控制、电机使能、活塞复位和清除报警按钮,还有24 V电源和电机报警指示灯。其中,电源控制和电机使能为带灯并具有自锁功能的按钮,活塞复位和报警清除为不带灯并没有自锁功能的按钮。在每次使用深度模拟系统前,需先进行活塞复位,保证系统回到初始状态。操作面板布局图如图5所示。
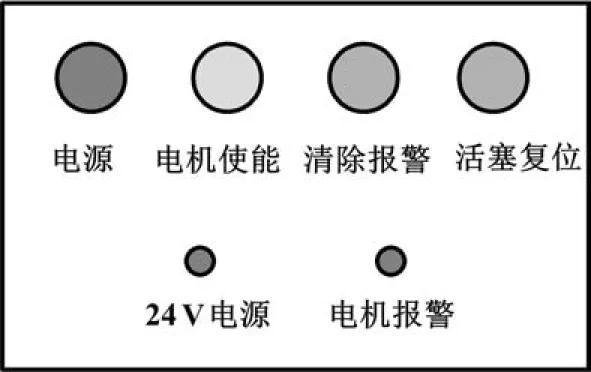
图5 操作面板布局图
3 系统软件设计
系统软件设计主要为单片机控制软件设计。单片机控制软件主要完成串口通信、定时、FLASH读写及PID算法等功能。
当今控制理论和技术高速发展的时代,PID控制算法因结构简单、控制参数容易整定、鲁棒性强及容易实现等优点,工业生产中95%以上的控制回路都采用PID控制算法。本系统采用改进的PID算法,当误差大时,加大误差控制作用的权重,以快速消除误差,提高系统响应速度;当误差小时,减小误差控制作用的权重,以避免超调,能使系统尽快进入稳定状态[4]。
在深度模拟系统中,单片机控制软件设计定时周期50 ms,每个定时周期接收上位机指令和操作面板指令,上位机指令包括参数设置、参数读取、自动加压和压力泻零;操作面板指令为活塞复位;每个定时周期单片机控制软件向上位机发送压力釜内的压力。系统主要工作流程图如图6所示。
图6中,主要列出了自动加压、压力泻零和活塞复位工作流程图,为保证系统安全,每次自动加压前必须读取压力传感器,若过压则不执行加压指令;每次自动加压后也必须读取压力传感器,若达到门限则停止加压;单片机控制软件接收到电机报警后立刻停止加压。
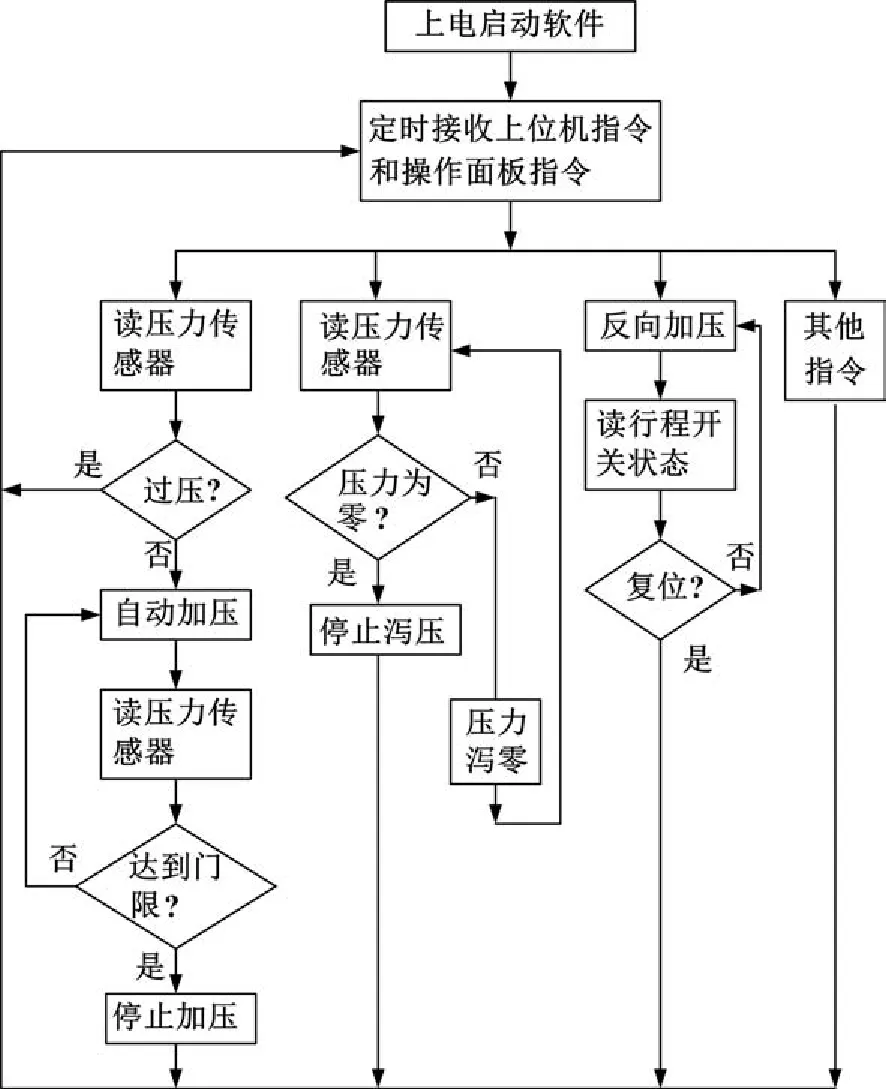
图6 系统主要工作流程图
4 结论
通过现场试验调试,基于MSP430单片机控制的伺服电机控制系统运行良好,整个系统非常简洁、模块化设计易于调试、扩展应用性强而且低成本。基于该设计的深度模拟系统,经调试能正常稳定地工作,且性能良好。后续可考虑将该系统应用于其他工业设计中。
参考文献:
[1]黄灿灿.基于PLC的脉冲磁体绕线机伺服电机控制系统的设计与实现[D].武汉:华中科技大学,2011.
[2]李红伟,胡涛,徐熙平,等.基于单片机的伺服电机控制系统的研究[J].长春理工大学学报:自然科学版,2012,35(1):116.
[3]胥开芳,蔡志涛.基于MSP430的智能测量表设计[J].机电工程技术,2014(6):86-89.
[4]赵磊,王哈力,何绪锋,等.基于单片机交流伺服电机转速控制系统研究[J].现代电子技术,2009(16):197.
(编辑:向飞)
Research on Servo-Motor Control System Based on SCM of MSP430
LI Cai-ju
(710 R&D Institute,CSIC,Yichang443003,China)
Abstract:The paper provides a scheme to control AC servo-motor based on single-chip Microcomputer of MSP430,which is the core controller of the system. The system design includes the hardware design and software design,which can realize the smooth control of the AC servo-motor speed. The scheme was used successfully in the depth simulation system. Motor rotation driving adding pressure equipment,can simulate any depth environment in the high pressure kettle.
Key words:SCM of MSP430;AC servo-motor;speed control;depth simulation system
作者简介:李彩菊,女,1984年生,湖北长阳人,硕士,工程师。研究领域:信息与控制、信号处理。
收稿日期:2015-05-13
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 021
中图分类号:TP368.1
文献标识码:A
文章编号:1009-9492 ( 2015 ) 11-0077-04
杂志排行

机电工程技术的其它文章
- TinyOS环境下交通信息采集自组网系统设计**国家自然科学基金资助项目(编号:50878088);广东省高等学校学科建设专项项目(编号:2013WYXM0133);广东省高等学校优秀青年教师培养计划资助项目(编号:Yq2013180)。
- 舵机加载系统及其伺服驱动器控制参数设置方法**航空科学基金资助项目(编号:20130863006)
- 基于海马号ROV富钴结壳的钻取技术研究**国家高技术研究发展计划(863计划)资助项目(编号:GZH201100307-04-01)
- 大摆锤驱动头动力学建模与仿真研究**国家质检总局科技计划项目(编号:2014QK255)
- 基于最小二乘法和递推最小二乘法的雷达伺服跟踪系统建模
- 基于ArtCAM的十二生肖浮雕加工研究**江苏省大学生实践创新计划项目(编号:201412808005Y)