基于海马号ROV富钴结壳的钻取技术研究**国家高技术研究发展计划(863计划)资助项目(编号:GZH201100307-04-01)
2015-03-12田烈余盛堰广州海洋地质调查局国土资源部海底矿产资源重点实验室广东广州510760
田烈余,盛堰(广州海洋地质调查局//国土资源部海底矿产资源重点实验室,广东广州 510760)
基于海马号ROV富钴结壳的钻取技术研究**国家高技术研究发展计划(863计划)资助项目(编号:GZH201100307-04-01)
田烈余,盛堰
(广州海洋地质调查局//国土资源部海底矿产资源重点实验室,广东广州510760)
摘要:针对大洋海山复杂地形下,深海浅地层岩芯取样钻机无法钻取富钴结壳的情况下,以海马号ROV为平台,设计并加装富钴结壳取样器,并介绍了富钴结壳取样器的基本结构、主要指标及其工作原理,也分析了设计的难点和主要参数,得出实验室测试结果及分析结论。
关键词:海马号;ROV;富钴结壳;钻取技术
0 前言
深海浅地层岩芯取样钻机如图1所示(简称:深海浅钻)是通过钻取海底硬质固体资源岩芯,获取岩体第一手地质资料的调查设备。本钻机适用于4 000 m工作水深、海底平均坡度不大于20°、凸凹不平程度不大于20°的作业区域。一般都在海山上进行作业,每当选址时海山的斜度大于20°时,深海浅钻就难于座底,在“海洋六号”船大洋25航次、27航次都出现浅钻座底七八次不成功,而重新选址的情况,特别是2015年29航次,站位都是加密站位,重新选址的难度就更加大。每当座底不成功,浅钻在斜坡上滑动的同时伴随着扭动,对光纤复合缆形成极大的伤害,使光纤缆外表的钢丝松散,从而会导致绝缘不好,而浅钻作业时需要2 700 V的高压,就存在很大的风险。浅钻无法座底,这个站位的样品就无法取到,即使重新选址取样成功,但也背离原有的设计意图,而且许多情况是坡度越大,富钴结壳越多。

图1 深海浅钻
对于以上原因,对于浅钻无法座底的站位,需要考虑其他的作业方式。浅钻的站位都在海山上,水深一般都小于4 000 m,而“海马”号ROV的作业最大水深是4 500 m,满足浅钻的作业要求。“海马”号ROV在国内已成功下潜多次,对设备的使用、操作、维护有了一套可行性的办法。“海马”号本身就是一个平台,在上面预留了控制接口、液压接口,为加装富钴结壳取样器提供了方便。ROV有四个垂直推进器,四个侧推推进器,操作灵活,可为在斜坡上座底提供保障,克服了浅钻最根本的困难。所以在ROV上加装富钴结壳取样器是完全可行的。
富钴结壳取样器实际上一套海底轻型岩芯钻机系统,能够搭载于海马号五功能机械手上,利用海马号提供的液压动力,在甲板人员操作下完成海底富钴结壳的取芯任务,即将在大洋36航次中进行应用。
1 取样器的基本结构和功能
富钴结壳取样器基本结构[1]如图2所示,其组成和各部分的功能为:动力头钻进,提供了钻头回转的扭矩,取得样品;钻具,包括了45 mm的金刚石钻头和岩芯管,提供了取芯钻进的钻头及其岩芯保护;供海水系统,冲洗海底沉积物及冷却金刚石钻头;油压补偿机构,避免动力头、钻具在海水高压下压坏;抛弃机构,发生了卡钻事故时抛弃钻进在海底的钻杆,使富钴结壳取样器从海马号ROV上脱离,使海马号顺利回收;液压阀箱,为取样器提供液压控制功能;摄像系统,对取样器工作状态进行观看;电控系统,对取样器进行检测和控制。
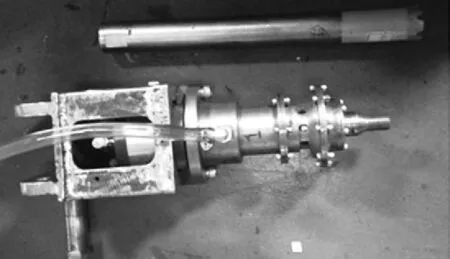
图2 富钴结壳取样器
2 富钴结壳取样器主要指标
富钴结壳取样器的主要的指标为:工作水深为4 500 m,取样尺寸为ϕ40×ϕ300mm×mm,整机重量为65 kg,海马号为其提供动力源20 MPa 和24VDC电源,总功率小于5 kW,最大钻进力500 N,钻进的前后调整角用海马号五功能机械手来调整,钻孔的位置也有五功能机械手调整,而且根据摄像系统可以选择想取样的位置来取芯。
3 工作要求与设计分析
3.1基本工作情况
在海马号ROV(如图3所示)的前端加上一个钻取取样器,主要用来在海山钻取结壳,特别是在坡度比较大,深海浅钻无法坐底的地方。它的工作原理是:当海马号的视频中看到结壳时,海马号慢慢坐底,当在四个垂直螺旋桨的压力下,海马号就稳稳的坐住,在ROV的控制室的电脑屏幕上可以看到钻取取样器的每一个动作,调整钻取取样器的角度,使得和结壳垂直,控制液压马达和液压水泵,钻进系统开动,慢慢的接近结壳,开始钻取,刚开始为低压钻进,以免卡钻,当钻进一定深度后,开始中压钻进,当没有结壳的黑烟或者钻进深度不明显时,可以高压钻进。当钻透结壳,看到白烟时,可以起拔钻杆,钻取结壳完成。当发生卡钻时,无法拔起钻杆,可以使用弃钻功能,安全回收ROV和钻取取样器的本体,只是丢失钻杆而已,出水后,可以重新安装钻杆,继续钻取结壳。

图3 海马号ROV在作业中
3.2技术设计难点
(1)技术设计难点一,主要是海马号ROV可以为富钴结壳取芯器提供了稳定的钻进支撑力(主要是垂直往下的动力)很小。因为海马号要在水中灵活的潜游,海马号ROV在水中的重力仅为很小的正浮力,仅仅靠四个垂直推进器给富钴结壳取样器提供稳定的支撑力,以保证富钴结壳取样器能够稳定的钻进,但是总垂直推进器的垂直力不是很大,其中的一部分力还要用于保证海马号ROV在海底海底坐底时的稳定、安全,能提供给富钴结壳取样器的钻进力为数百牛,这与陆地普通的岩芯钻上万牛的钻进压力相比,就相去甚远。因此必须要设计特殊的金刚石钻头、钻具,以满足极低钻进压力下的钻进需要[2-3]。
(2)技术设计难点二,为了满足海马号ROV水下重量的配载的严格要求,富钴结壳取样器总质量不得超过250 kg,而且还要实现几种特殊的功能。这就给设计带来了相当高的技术难度,整体富钴结壳取样器必须尽量采用钛合金或着高强铝合金材料去制造,另外在设计中采取各种必要方法去减轻整机的质量。
技术设计难点三,富钴结壳取样器钻进富钴结壳压力确定,还有就是取样器钻头转速确定、拔取钻杆时拔出力的计算也有很大的难点。
4 主要工作参数的确定
4.1钻进压力的确定
海马号ROV在水中是正浮力的,当海马号要坐底时必须要用自身的四个垂直推进器产生的1 000 N的下推力,为保证钻进过程的稳定,还需要为海马号保留一部分坐底稳定力,因此在开启四个垂直推进器的情况下也不要大于550 N。在实验室的进行实钻试验,在500 N的钻进压力下,钻孔深度为280 mm,满足取芯的工作需求。
4.2取样器转速的确定
富钴结壳取样器的转速是影响取样器的金刚石钻头钻取效率的重要的一个因素[4]。在这一确定的条件之下,取样器的转速越高,钻进的速度就越快。根据钻进的转速公式1去计算。V-钻具的钻进速度(m/s),金刚石钻头的的钻进一般取为2.0~4.0m/s,D-钻头的公称直径(mm),D=0.78 m。
n=60 V/πD(1)
计算后n为549~1 294 r/min,因富钴结壳取样器钻压很小,钻孔最大深度为400 mm,可采用的办法就是采用高速获得较快钻进速度。在海马号的很小压力之下,钻具的转速就要取高值,所以取n=800~1 500 r/min之间的钻进速度。
5 整机及关键部件的设计
5.1控制系统
现在的浅钻是通过光纤通信的,而ROV也是通过光纤通讯,所以只需在ROV上加装控制筒而已。富钴结壳取样器的控制系统具有良好的传感器数据实时采集与集中显示功能,并且对可以对液压阀组进行操作功能。传感器数据包括了下面几种:取样器转速磁感应传感器、钻进深度位移传感器、倾角传感器、绝缘漏水检测报警传感器。其中转速、位移、压力、电压、电流以数值显示在显示屏上,可以进行时时的检测。
5.2机械设计
确定整个钻取取样器的框架,所有传感器的安装位置。设计钻进系统与事故弃钻机构。由于ROV四个螺旋桨给予的压力不如现有的浅钻大,所以要重新设计钻具系统,以满足低压下的钻具要求。由于ROV在水中是正浮力的,所以要尽量减轻整个取样器的重量。
5.3液压设计
钻取取样器的液压系统由油泵组件、液压控制阀箱、带压力补偿的油箱、液压管路和各液压执行机构组成。液压系统全部采用深海专用液压元器件,各换向阀和比例控制阀均为电磁驱动,由水下计算机系统控制动作,而钻取取样器的动力必须有ROV本体提供,所以要设计和ROV本体连接的液压接口和控制接口。
5.4软件设计
船上甲板操作计算机接收水下控制计算机的数据,如各传感器数据、监控视频等信号,分别在计算机显示屏上不同的部位显示。钻进操作人员根据所显示的数据及图像对富钴结壳取样器的工作状态做出判断,根据操纵规程发出操作指令,已完成钻机工作,富钴结壳取样器运行的图像和数据将记录到硬盘上,供后来查看。
6 取样器的实验及结果分析
富钴结壳取样器在实验室条件下,对富钴结壳取样器进行了钻孔实验,以检验取样器的性能。实验是在水桶中进行的,采用了海马号ROV的液压动力源,实验材料为凝固的水泥块,压力钻进不大于400 N,富钴结壳取样器取样的尺寸为ϕ40 mm×ϕ300 mm,结果证明,富钴结壳取样器的各种性能达到了设计要求。这套富钴结壳取样器将用于2015年大洋36航次中。
7 结论
在海山中无论多么复杂的环境,取样器都是可以使用的,而且能取得满意的效果,是深海浅钻的有力补充,将为我国大洋的资源勘查、评价和矿区圈定提供可靠地样品数据,也为开采富钴结壳提供实用的工程数据。
参考文献:
[1]赵宏强. 7000m深海钴结壳取芯器研究[J].中国工程机械学报,2005,3(4):14-15.
[2]万步炎. 7000m载人潜器的配套钴结壳取芯器[J].有色金属,2009(04):32-33.
[3]万步炎.深海浅地层岩芯取样钻机的研制[J].矿产研究与开发,2006(26):49-51.
[4]武汉地质学院.钻探工艺学[M].北京:地质出版社,1981.
(编辑:阮毅)
The Hai Ma ROV Rich Cobalt Crust Drilling Technology Research
TIAN Lie-yu,SHENG Yan
(Guangzhou Bureau of Marine Geological Survey,Guangzhou510760,China)
Abstract:In view of the ocean seamount under complicated topography,shallow core sampling drill cannot drill deep rich cobalt crust,In the HaiMaROV platform,designed and equipped with rich cobalt crust sampler. And rich cobalt crust sampler is introduced and its working principle,basic structure,main indexes of the difficulties in design are analyzed and the main parameters and laboratory test results and analysis conclusions.
Key words:Hai Ma;ROV;rich cobalt crust;drilling technology
作者简介:第一田烈余,男,1981年生,山东临沂人,硕士。研究领域:ROV技术研究、海洋地质调查及海洋技术研究。
收稿日期:2015-09-09
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 003
中图分类号:P715.1
文献标识码:A
文章编号:1009-9492 ( 2015 ) 11-0013-03
杂志排行

机电工程技术的其它文章
- TinyOS环境下交通信息采集自组网系统设计**国家自然科学基金资助项目(编号:50878088);广东省高等学校学科建设专项项目(编号:2013WYXM0133);广东省高等学校优秀青年教师培养计划资助项目(编号:Yq2013180)。
- 舵机加载系统及其伺服驱动器控制参数设置方法**航空科学基金资助项目(编号:20130863006)
- 大摆锤驱动头动力学建模与仿真研究**国家质检总局科技计划项目(编号:2014QK255)
- 基于最小二乘法和递推最小二乘法的雷达伺服跟踪系统建模
- 基于ArtCAM的十二生肖浮雕加工研究**江苏省大学生实践创新计划项目(编号:201412808005Y)
- 一种多工位全自动玩具喷涂机的设计