帕金森患者步行运动的定量分析
2015-03-12乔子晏高帅锋刘春风毛成洁
汪 丰 邹 亚 乔子晏 高帅锋 刘春风 毛成洁
(1 东南大学生物科学与医学工程学院,南京210096)
(2 苏州大学附属第二医院,苏州215004)
步行是人类活动的基础,被公认为是世界上最好的运动[1].有规律的行走具有降低血压、改善大脑与植物神经功能、预防老年痴呆等作用.正常人行走时上下肢和躯干之间不断地协调变化,双侧下肢交替负重,两臂轻松地随着两腿的交替运动而摆动,保持身体的协调与稳定.然而,当人们在疾病、甚至生理功能和精神状态发生变化时,人体的步行行为会受到不同程度的影响.因此,对步行运动的运动特征进行深入的分析研究,有助于制定康复治疗方案和评价药物效果.
目前,分析人体步行运动常用的方法有量表评定法和计算机视觉技术法.前者受主观因素影响较大,且运动功能的细微变化不易被发现;后者的实时性较差,且受设备场地限制.近年来,采用穿戴式传感器获取信息的方法越来越受到青睐,该方法可获得人体在行走过程中的多项运动学参数.例如,Xuan 等[2]在患者的左右脚鞋子上固定加速度和角速度传感器,结合时空域的分析方法,计算帕金森病(Parkinson's disease,PD)患者的步长、步态对称性和节律性等;Popovic 等[3]在患者双侧下肢的大腿、小腿部位固定加速度传感器,以检测PD 患者的冻结步态.这些研究方法对于分析和评价人体运动功能具有重要作用.
在现有技术的基础上,本文设计了一套基于三轴加速度和三轴角速度传感器的运动功能评价系统.首先,将传感器采集节点分别佩戴在人体的上下肢和躯干中心部位,采集人体行走过程中的加速度和角速度数据;然后,对采集到的数据进行分析处理和计算,进而得到人体行走时的运动学参数;最后,对比分析了PD 患者和健康老人两组人群的运动数据.实验结果表明,本文提出的运动功能评估系统能够有效地评价PD 患者的运动功能.
1 无线传感器网络系统的设计
随着电子器件微型化和低功耗技术的发展,基于穿戴式传感器技术监测采集人体运动数据的方法备受关注.然而,现有方法主要是采用单个传感器来分析人体步态的运动特征,忽略了行走过程中手臂摆动对人体步态和躯干协调性的影响,因此难以对行走进行综合系统的评价[4].
本文所设计的运动功能评价系统的硬件部分主要包括数据采集发送模块和数据接收模块.数据接收模块通过USB 接口与电脑相连.数据采集发送模块共包括5 个数据采集终端节点,它们分别佩戴于人体的左右脚踝部、左右手腕的背侧和腰部中心.每个数据采集终端节点由中央控制器(MSP430F149芯片)、数据存储模块(W25Q256 芯片)、电源模块、无线通信模块(ZigBee 芯片)和传感器模块(MPU6050 芯片)组成.其中,MPU6050芯片由Invensense公司生产,安装有全格感测范围为±250,±500,±1 000,±2 000 (°)/s 的三轴角速度传感器,可准确追踪快速与慢速动作,用户可程式控制的加速度传感器的全格感测范围为±2g,±4g,±8g,±16g.本文中,加速度传感器的量程选择使用±8g,陀螺仪的量程选择使用±1 200 (°)/s,加速度和角速度的数据采样率统一为100 Hz.
2 步行运动参数分析与计算
行走是反映人体上下肢运动能力最直观的因素[5],因此,分析行走过程中的运动学特征具有重要的研究价值.
2.1 步行运动数据的预处理
受系统硬件和外界干扰,实验所采集的原始数据中掺杂着多种噪声.为准确计算运动学参数,需要对所采集到的数据进行预处理.首先,采用截止频率为6 Hz 的三阶巴特沃斯滤波器对角速度数据进行预处理;然后,采用小波阈值去噪的方法对加速度数据进行滤波处理[6];最后,利用滑动平均滤波器对加速度和角速度数据进行平滑处理.预处理后的加速度曲线如图1所示.由于佩戴时传感器x轴方向垂直向下,因此x 轴的加速度值以g 为基线上下波动.
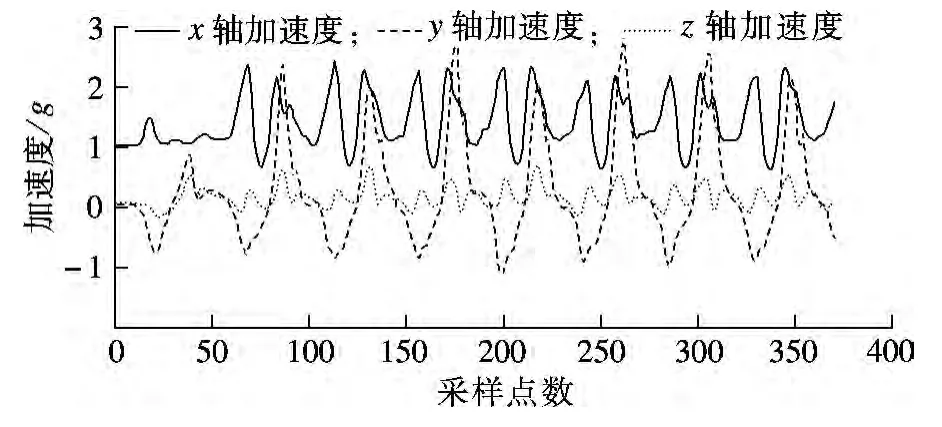
图1 单侧下肢步态加速度曲线
2.2 上肢运动参数分析与计算
研究表明,人体手臂的不同摆动模式(甚至摆动的先后顺序和摆动的幅度频率)严重影响着行走模式.行走时手臂有节律地交替摆动可以起到抵消身体沿中轴扭转力的作用,从而有利于行走的协调与稳定[7].本文采集了健康老人和PD 患者两组人群行走过程中的手臂摆动加速度和角速度数据,对摆臂幅度、速度、角度和左右手臂摆动节律性等运动学参数进行分析.人体手臂在t 时刻摆动的角度θt可根据下式计算:

式中,θ0为起始时刻的角度;wt为t 时刻的角速度.
信号本身夹杂着噪声,长时间的积分会造成误差的累计,从而引起严重的基线漂移.本文采用分段积分的方法来解决这一问题.由于实验过程中加速度信号的变化幅度较小,周期性较差,因此分段依据为角速度信号的准周期性.手臂摆动幅度的计算步骤如下:
①计算人体手臂摆动在前后、左右和上下方向的加速度值,即

式中,x1,y1,z1分别为传感器坐标下x,y,z 轴方向上的加速度;x2,y2,z2分别为地理坐标系下x,y,z轴方向上的加速度;C 为旋转矩阵,且

式中,θ,r,φ 分别为传感器在x,y,z 轴方向上的旋转角度.
②对求得的3 个方向加速度值分别进行积分,计算出3 个方向的速度值.
③对3 个方向的速度值再次积分,计算出3个方向的位移.
2.3 下肢运动参数分析与计算
步行周期是指一侧下肢完成从足落地到再次落地的时间过程.根据下肢在步行时所处的位置可以把整个步行周期分为支撑相和摆动相.其中,支撑相是指下肢接触地面及承受重力的时间;摆动相是指足离开地面向前迈步到再次落地之间的时间[8].目前,在研究人体下肢运动时,主流方法是通过步态参数的计算来实现的.其中,常用的步态参数主要包括步长、步速、下肢关节角度、步态节律性以及步态相位等.其步长、步速、下肢关节角度的计算与2.2 节中手臂摆动参数计算原理类似;步态相位的起止点如图2所示.由图中的步态角速度信号时域波形可知,人体的步态信号具有良好的规律性和周期性,同侧下肢角速度信号相邻波峰之间的距离可以表示为一个复步的步行周期,两侧下肢相邻波峰之间的距离可以表示为一个单步的步行周期.设n 为每个复步周期的采样点,f 为采样频率,则步态节律性R 的计算公式为


图2 下肢部位传感器采集节点的角速度曲线
通过选择不同的起始点,可划分出不同种类的步态周期.图2中,复步长和单步长的周期划分依据角速度信号的峰值,而摆动期和支撑期的周期划分则依据角速度信号的谷值.正常情况下,支撑期占整个步行周期的60%,摆动期占整个步行周期的40%[9].
2.4 旋转参数分析与计算
本文所设计的实验是10 m 折返行走实验.其中,在往返10 m 行走中有一段转弯的过程,该过程中的数据是分析计算躯干旋转参数的主要依据.测试对象脚踝部传感器采集节点的单轴角速度曲线如图3所示.

图3 脚踝部传感器采集节点的角速度曲线
针对PD 患者肌肉僵直、运动迟缓甚至出现冻结步态的临床特征,本文主要分析计算左右脚转弯所用时间、转弯过程的平均合角速度和转弯过程中合加速度信号均方根3 个参数.其中,合加速度信号均方根的计算公式为

式中,am为m 时刻的加速度值;ua为合加速度信号均值.
3 步行运动对称性协调性的评估
人体步行的对称性和协调性反映了人体行走时平衡受到干扰后趋近或返回初始平衡状态的能力,是预测跌倒风险的重要指标.目前,关于人体行走时手臂摆动和步态之间协调性的研究较少,这主要是因为实验所需采集的数据量较大,而且没有相关的标准供参考等.本文根据所采集到的健康老人和PD 患者在步行运动过程中的摆臂和步态加速度和角速度数据,分析计算了2 组人群的对称性和协调性.对称性的计算分析方法很多[10],本文根据下式来计算人体双侧下肢的对称性:

式中,TZ为正常人的步态周期;T 为实际测量的步态周期;Zr为人体左右侧下肢支撑相的比值;Mr为人体左右侧下肢摆动相的比值.
由式(6)可知,S 越接近于1,说明人体双侧下肢的对称性越好.
在分析步行运动过程中人体协调性时,本文主要研究了上下肢动作的顺序先后性、一致性和动作的幅度.其中,上下肢动作顺序先后性可根据下式进行计算:

式中,ti和tj分别为事件i 和事件j 的起始时刻;Tij为2 个事件的时间差.
2 组人群步行运动对称协调参数均值见表1.

表1 2 组人群对称协调参数均值
4 结果分析与讨论
13 例PD 患者和15 例健康老人步行运动过程中加速度和角速度数据的部分统计结果见表2.由表可知,较健康老人而言,PD 患者行走时上肢运动特征变化主要包括手臂摆动的幅度减小、手臂摆动的角速度幅度差明显下降、上肢摆臂的对称性略有降低;下肢运动特征的变化主要包括步长减小、支撑相所占比率加大、摆动相缩短、步态节律性增加且波动性较大;躯干旋转的运动特征主要包括转弯时间明显增加、上下肢的对称协调性降低.PD 患者的波动性明显大于健康老人,说明PD 患者动作的连续性和稳定性较差,这也是导致患者容易跌倒的重要原因.

表2 2 组人群运动学参数均值
由式(1)~(3)可知,在计算空间参数(如步长、摆臂幅度等)时,首先要对角速度信号进行一次分段积分,求出地理坐标系下的加速度信号,然后对加速度信号进行二次积分,求得位移空间参数.然而,经过预处理后的加速度和角速度信号仍具有干扰噪声,这些干扰信号在积分过程中会被逐步放大,进而影响计算结果.本文参照文献[11]的方法对空间参数计算结果进行处理,系统实际测量100 cm 所得的误差为±8.37 cm.
在目前人体步态研究的基础上,本文研究了人体手臂摆动和躯干旋转.实验结果表明,在行走过程中,人体手臂摆动的幅度、对称性和躯干转弯所用的时间等参数对人体运动功能的评价具有重要作用.对比分析PD 患者和健康老人步行运动时的运动特征可知,本文设计的系统不仅操作简单方便,提高了医生的工作效率,而且能够提供更客观可量化的数据,有助于提高诊断率和医患之间的信任度.
5 结语
本文所设计开发的运动功能评价系统主要包括硬件和软件2 个部分.其中,硬件部分主要是指运动数据的采集设备,其核心是MPU6050 模块,负责采集人体运动过程中的加速度和角速度信号.软件部分主要是加速度和角速度信号的分析处理算法部分,负责计算研究人体运动功能评价的参数指标.实验结果证明,该系统具有较好的实用价值.
References)
[1] 汪琳,程君.步行者权利的比较与思考[J].江西教育学院学报,2012,33(3):128-132.Wang Lin,Cheng Jun.Compairing and thinking about pedestrian's rights[J].Journal of Jiangxi Institute of Education,2012,33(3):128-132.(in Chinese)
[2] Xuan Y,Zhao Z,Fang Z,et al.Gait cycle recognition based on wireless inertial sensor network[J].IERI Procedia,2013,4:44-52.
[3] Popovic M B,Djuric-Jovicic M,Radovanovic S,et al.A simple method to assess freezing of gait in Parkinson's disease patients[J].Brazilian Journal of Medical and Biological Research,2010,43(9):883-889.
[4] Cutti A G,Giovanardi A,Rocchi L,et al.Ambulatory measurement of shoulder and elbow kinematics through inertial and magnetic sensors[J].Medical &Biological Engineering &Computing,2008,46(2):169-178.
[5] Nanhoe-Mahabier W,Snijders A H,Delval A,et al.Walking patterns in Parkinson's disease with and without freezing of gait[J].Neuroscience,2011,182:217-224.
[6] 邹亚,汪丰.加速度信号小波降噪的改进算法[J].北京联合大学学报:自然科学版,2014,28(2):64-68.Zou Ya,Wang Feng.Wavelet de-noising algorithm of acceleration signal[J].Journal of Beijing Union University:Natural Science,2014,28(2):64-68.(in Chinese)
[7] Jasiewicz J M,Allum J H J,Middleton J W,et al.Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals[J].Gait &Posture,2006,24(4):502-509.
[8] Liu T,Inoue Y,Shibata K.Development of a wearable sensor system for quantitative gait analysis[J].Measurement,2009,42(7):978-988.
[9] Yang S,Laudanski A,Li Q.Inertial sensors in estimating walking speed and inclination:an evaluation of sensor error models[J].Medical &Biological Engineering&Computing,2012,50(4):383-393.
[10] Sant'Anna A,Salarian A,Wickstrom N.A new measure of movement symmetry in early Parkinson's disease patients using symbolic processing of inertial sensor data[J].IEEE Transactions on Biomedical Engineering,2011,58(7):2127-2135.
[11] Yang S,Zhang J T,Novak A C,et al.Estimation of spatio-temporal parameters for post-stroke hemiparetic gait using inertial sensors[J].Gait & Posture,2013,37(3):354-358.