电磁耦合器矢量控制优化方法的研究
2015-03-12宋长源
宋长源,王 超
(河南科技学院,新乡453003)
0 引 言
永磁同步电机是一种多变量、非线性、强耦合系统,需要对之实现自适应矢量控制较为困难,永磁同步电机的有效设计和控制是提高电能传输性能的关键[2],对此,许多学者进行了实际的应用研究,取得了一定的成果。Messine 等[3]提出了一种有确定性分叉和边界的全局优化方法进行永磁同步电机的矢量控制,实现了永磁电机的电力机械执行机构的优化控制,但该方法具有自适应性能不好,设计复杂等问题;文献[4]提出一种基于广域参数分布反馈控制的高效率外转子式永磁同步电机矢量控制方法,跟以前的PID 无功率补偿控制相对比,其做到了一些改进,同时也具有一些缺点,在电压呈现超负荷状态时会使电流畸变的现象更为明显,性能稳定性差;另外,Feezor 和Sorrell 等人研制的一款200 W 水下PMSM CLPT 系统,其电能传输效率能够做到79%;文献[6]使用基因遗传算法对表贴式永磁直流电机进行优化,建立的永磁同步电机矢量控制目标函数包括永磁体的特性、电机性能、磁应力和温度限制,取得了较好的效果,但需要进行控制效能优化。可见,传统的控制方法包含多变量和多约束的多目标优化问题,在控制优化过程中忽略了电机的速度要求和稳定性要求,性能不好。
针对上述问题,本文提出一种基于多目标粒子群优化的永磁同步电机的矢量控制优化算法,首先构建了永磁同步电机的参数电磁转矩及电磁力、电压及电流的关系模型,建立永磁同步电机的电磁耦合器设计模型,进行电磁耦合器漏感和励磁电感有限元计算,以此为基础构建控制目标函数,采用多目标粒子群优化方法实现矢量控制优化,改进永磁同步电机的电路设计,实现控制方法仿真,实验结果验证了本文控制方法的优越性能。
1 永磁同步电机控制参数模型及问题描述
1.1 永磁同步电机电磁耦合器模型及参数描述
首先构建永磁同步电机的电磁耦合系统模型和等效电路。永磁同步电机的外形和大小具有变化多端的优势,其运用面广,在永磁同步电机的矢量控制参数中,需要参考的权重系数包括永磁同步电机的总损耗、电机体积/重量、成本等因素。为了提高电能的传输效率,需要使漏磁和漏磁电感达到最小,同时需要较小噪声,永磁同步电机矢量控制的根本问题是建立几何参数和目标函数的表达式[7-10]。本文研究的永磁同步电机电磁耦合器为平板式电磁耦合器,示意图如图1 所示。
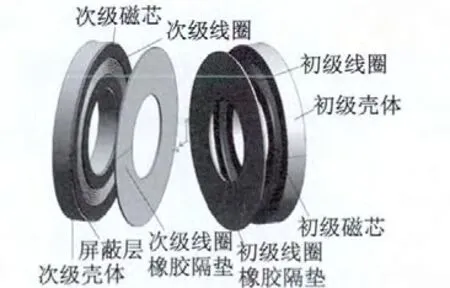
图1 平板式电磁耦合器示意图
结合图1,对系统建立互感耦合模型,给出传输功率和传输效率的计算模型。在本系统中,欧姆损耗远远大于辐射损耗,因此忽略辐射损耗,仅考虑欧姆损耗,感应电能传输系统属于分离式结构,其耦合系数相对低,功率因数较小,系统的传输能力低,得到磁共振模式无线感应电能传输系统原理如图2 所示。
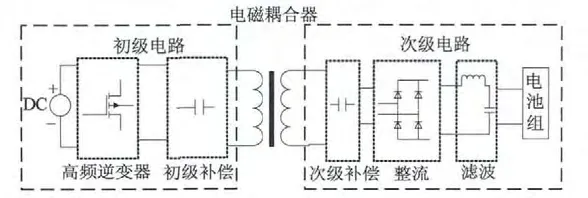
图2 感应电能传输原理图
结合上述设计的电磁耦合器和感应电能传输电路,设计控制参数约束模型。
1.2 永磁同步电机的控制参数约束模型描述
在上述电磁耦合器和感应电能传输电路设计的基础上,为了实现对永磁同步电机的矢量控制优化,需要建立控制目标函数,其基础是给出控制参数,构建永磁同步电机的参数电磁转矩及电磁力、电压及电流的关系模型,结合图2,给出永磁同步电机的电磁耦合器“T”型等效电路,如图3 所示。
以图3 为依据进行参量描述和分析,在磁场密度为B 的磁场中通过电流为I 时,导体所受的力:f=IlB。假设Aw为绕组横截面积,则:Aw=πlw(2rr+2lg+lw),其中,rr为转子半径,lw为绕组厚度,lg为气隙长度。忽略电枢反应和定/转子铁心磁阻,可求出绕组表面处的永磁体体积的磁感应密度:
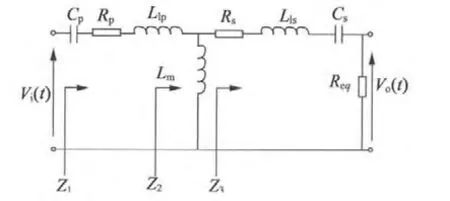
图3 电磁耦合器“T”型等效电路

式中:Fm为每极磁动势;Ag为永磁同步电机的额绕组气隙面积;R 为绕组,可分别用下述公式计算出Fm,Ag,R:
式中:永磁同步电机的真空磁导率μ0=4π×10-7H/m;μr1和μr2为永磁体和绕组的磁导率。一般来说,电机的功率损耗主要可以分为三大部分:电损耗、磁损耗和机械损耗,进一步计算电磁力、电压及电流的关系模型,假设μr1和μr2为1,则:
考虑其漏磁系数k1和实际绕组在极下的跨距系数kβ等参数,可以得出永磁同步电机的转矩计算:
式中:α 为实际线圈在永磁体磁场下瞬间跨度,由于永磁体与转子铁心相对静止,所以相对频率为零,近似:

式中:ks<1,δ 为经验值。然后计算电感Llp,Lls和Lm,而在计算漏感和励磁电感时,其计算精度将对谐振性能产生重要影响;计算电容Cp和Cs,谐振条件下补偿电容的值取决于漏感和工作频率。
由此得到了永磁同步电机的控制参数约束模型,以此为基础,计算等效电路中的参数,以进一步分析系统性能。
2 控制原理及矢量控制算法改进设计
2.1 永磁同步电机矢量控制优化目标函数
永磁同步电机系统中,电磁耦合器与永磁同步电机直接刚性相连,考虑到磁损耗,电磁转矩表示:
得到输出转矩:

此时,永磁同步电机抗干扰模糊控制系统的传递函数定义:

式中:Y(s)为输出的控制参数;R(s)为输入的控制参数;e-τs为抗干扰模糊时的滞特性参数。当永磁同步电机抗干扰模糊控制模型准确时,下式成立:

则模糊控制的反馈信号:

由此可以看出,模糊反馈信号是从Gm(s)的输出端直接引出的,绕开了模糊控制系统中的时滞环节e-tms对其产生的影响。
式中:ε 为一个小的常数,fu(Χ)定义:

式中:σ 为一个较大的常数。假设一定的输入节点个数N 和向量元素个数k。在圆柱电机中相比其他损耗,可以忽略风阻损耗,初始化设置输入节点和输出节点的权值。当x(t),t=0,1,…,n -1 为样本的训练序列时,得到电机组传动矢量控制状态方程:
式中:gNa为转动粘滞系数;αm为功率最优转速;gL为电机转动权重系数;n 为样本训练序列;h 为产生的磁通电场;αm为抖振振幅。当模糊控制的特征方程中不存在时滞项时,永磁同步电机矢量控制预估模型能够对时滞环节的精确模糊控制进行有效补偿。如果模型不准确时,传递函数可以定义:

式中:Gm(s)e-tms对于不准确模型的补偿因子。通过上述处理,构建了永磁同步电机矢量控制优化目标函数,传统的控制方法包含多变量和多约束的多目标优化问题,在控制优化过程中忽略了电机的速度要求和稳定性要求,性能不好,需要进行控制方法优化改进。
2.2 多目标粒子群优化控制方法
本文提出一种基于多目标粒子群优化的永磁同步电机的矢量控制优化算法,根据目标函数中使用的权重系数以及控制不同目标的重要性对多目标之间的权重进行选取,构建多目标粒子群优化目标函数表示:

式中:wp,wv,wc为永磁同步电机的系统传输权重系数;p1=pcu+ph+pe+pb+pw为电损耗、机械损耗与磁损耗之和。矢量控制优化问题的约束条件不仅仅包括供电要求和机械要求,同时还包括成本,制造以及热条件,因此采用粒子群优化算法,将每个个体看作是D 维搜索空间中的矢量控制微元,设计三层前向粒子群变结构网络,提高转速调节器的控制性能,粒子群微粒i 的速度为Vi=(Vi1,Vi2,…,ViD)。对每一代粒子群,计算电机的力矩系数和反电动势系数,对第d 维(1≤d≤D)根据如下方程进行矢量迭代控制:
式中:w 为永磁同步电机惯性权重;c1和c2为加速常数。通过上述处理,提高了系统功率因数和输出功率,进而提高了永磁同步电机的电能传输效率。
3 仿真实验与结果分析

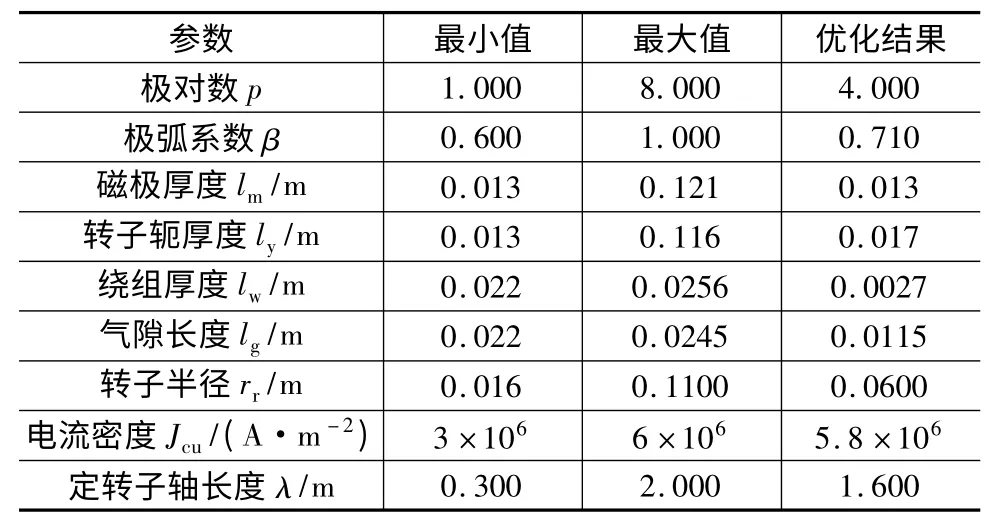
表1 永磁电机矢量控制变量优化范围及结果
在上述仿真环境和参数设定的基础上,根据系统输入电压、传输功率及工作频率的要求,给出永磁同步电机电磁耦合器的设计结果,得到本文设计的永磁同步电机矢量控制下的电磁耦合器3D 磁场分布和轴向切面磁场分布有限元分析结果如图4 所示。

图4 永磁同步电机的磁场分布仿真结果
分析图4 仿真结果可见,采用本文的矢量控制方法,对主磁场和漏磁场进行了鲜明的区分,因此能够有效地模拟永磁同步电机的磁场分布特性,提高对永磁同步电机漏感和励磁电感的计算精度,为优化电机的电能传输效率奠定基础。根据设计参数,采用本文控制方法,以永磁同步电机的轴向偏移和负载能力为测试指标,进行矢量控制性能仿真,得到的仿真结果如图5 和图6 所示。
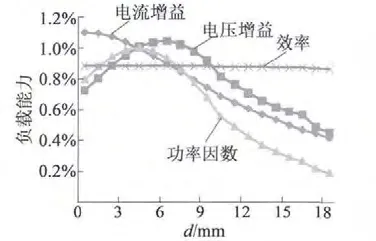
图5 永磁同步电机矢量控制轴向偏移
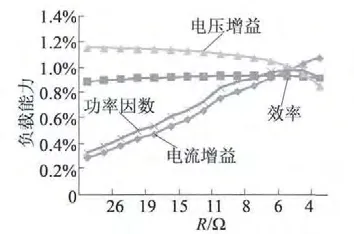
图6 负载能力测试结果
分析上述仿真结果可以得出,采用本文控制方法,永磁同步电机对于偏芯偏移有很好的适应性,通过矢量优化控制,提高了电机系统的电流增益、电压增益和电能传输效率,电磁耦合器可以在较大的负载范围内实现稳定的电压输出,在较大的中轴向定位差下,电机效率仍然保证在90%左右,展示了本文控制方法的优越性能。
4 结 语
在对电磁耦合器矢量控制优化方法研究时,需要对电磁耦合器进行矢量优化控制,研究永磁同步电机的控制优化方法具有重要意义。本文提出一种基于多目标粒子群优化的永磁同步电机的矢量控制优化算法,首先构建了永磁同步电机的参数电磁转矩及电磁力、电压及电流的关系模型,建立永磁同步电机的电磁耦合器设计模型,构建控制目标函数,采用多目标粒子群优化方法实现矢量控制优化,设计出电磁耦合器和感应电能传输电路,设计控制参数约束模型,提高控制性能。研究结果表明,采用本文的优化矢量控制方法,提高对永磁同步电机漏感和励磁电感的计算精度,优化电机的电能传输效率,性能优越。
[1] BRADLEY A M,FEEZOR M D,SINGH H,et al.Power systems for autonomous underwater vehicles[J].IEEE Journal of Oceanic Engineering,2001,26(4):526 -538.
[2] 雷邦军,费树岷,翟军勇. 静止无功补偿器(SVC)的一种新型非线鲁棒自适应控制设计方法[J].中国电机工程学报,2013,33(30):65 -70.
[3] MESSINE F,NOGAREDE B,LAGOUANELLE J L.Optimal design of electromechanical actuators:a new method based on global optimization[J].IEEE Transactions on Magnetics,1998,34(1):299-308.
[4] KOJIYA T,SATO F,MATSUKI H,et al.Construction of non -contacting power feeding system to underwater vehicle utilizing electromagnetic induction[C]//Oceans 2005 - Europe,2005,1:709 -712.
[5] FEEZOR M D,SORRELL F Y,BLANKSHIP P R.An interface system for autonomous undersea vehicles[J]. IEEE Journal of Oceanic Engineering,2001,26(4):522 -525.
[6] 齐昕,周晓敏,马祥华,等.感应电机预测控制改进算法[J].电机与控制学报,2013,17(3):62 -69.
[7] KOJIYA T,SATO F,MATSUKI H,et al.Automatic power supply system to underwater vehicles utilizing non - contacting technology[C]//Oceans 2004 Mts/IEEE Techno - Ocean,2004:2341 -2345.
[8] 温阳东,宋阳,王颖鑫,等.基于模糊神经网络的电力变压器故障诊断[J].计算机测量与控制,2013,21(1):39 -41.
[9] 李岳洪,万频,王永华,等.改进的细菌觅食算法求解认知无线网络频谱分配问题[J].计算机科学,2013,40(8):49 -52.
[10] LIN Jie,LI Xing - fei. Construction of contactless power feeding system for ocean buoy[C]//WiCOM,2011 7th International Conference,2011:1 -4.