差动式垂直微力测量装置的设计仿真
2015-03-11王晓锋刘正士王云燕
王晓锋, 刘正士, 王 勇, 王云燕, 龙 灿
(合肥工业大学 机械与汽车工程学院,安徽 合肥 230009)
随着人类对海洋研究的不断深入和海洋工程建设规模的不断扩大,对海洋流速测量的技术要求逐渐提高。海流测量不仅需要测量速度较大的水平流速,还需要测量极其微小的上升流[1],微小上升流产生的升力可低至μN级[2],因此研制测量微小上升流的流速传感器的重要性越来越突出[3]。
目前,微力测量的原理主要有原子力显微镜悬臂梁技术、压阻式测力、电容式测力等[4]。原子力显微镜悬臂梁加工精度高,价格昂贵,测量受材料表面特性影响大,对不同材料的测量标准尚不统一[5];压阻式测力是利用压阻材料的压阻效应制备的一种力测量装置,但是这种方法易受到温度的影响[6];电容式测力装置易受到电磁场的干扰[7];文献[8]研究的微力标定与测量装置主要针对的是微力的产生,未涉及微力的测量。
本文设计的微力测量装置,是基于柔性铰链和杠杆原理,首先将要测量的微力利用杠杆原理进行放大,放大后的微力在装置上产生应变,敏感元件将应变信息转换为电信号输出。装置结构简单,容易加工制造,柔性铰链的应用减少了系统中的摩擦环节[9],提高了测量精度。
目前关于消除重力场影响的机构研究很少,而本文设计的微力测量装置自身重力产生的影响可能远远大于所要测量的微力,因此必须对装置在重力场中的性能加以分析[10]。本文在考虑重力场(文中所讲重力场是指g=9.8m/s2)影响后,对装置进行改进设计,最终采用对称配重的差动结构方案。
1 单侧微力测量装置
1.1 工作原理
单级柔性铰链杠杆机构的优点是结构简单、传动阻力小,但如果想得到较大的放大倍数则必须延长杠杆臂长,这在某些限制空间内很难得到应用[11];多级杠杆放大机构的优点是可以在相对狭小的空间里获得比单级杠杆更大的放大倍数,但多级杠杆随着级数的增加传递力的损耗也增大,且结构复杂、影响因素增多[12]。综合以上因素,并考虑到传感器外壳尺寸的限制,在达到预定功能的前提下,本文装置选用3级杠杆机构,示意图如图1所示。
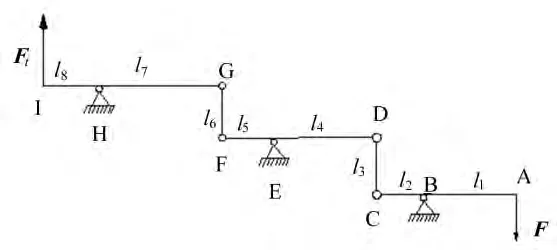
图1 3级杠杆力微力放大原理
图1中,杠杆ABC为一级杆;DEF为二级杆;GHI为三级杆;GF、DC为连接杆;装置的支撑和连接部位B、C、D、E、F、G和 H处均采用柔性铰链。点A为输入端,施加向下的力F,经一级杆ABC放大后经过连接杆CD传递到二级杆上,二级杆DEF再次放大传递到三级杆GHI上并通过输出端I输出力Ft,方向向上。Ft在输出端产生应变,应变信号经处理后输出所测量的微力信息。装置参数见表1所列。
根据文献[2]初步确定机构的整体厚度为5mm,柔性铰链半径为2.9mm,柔性铰链最薄处为0.2mm。由杠杆原理计算可知,单侧装置的力放大比为:


表1 装置的尺寸参数 mm
1.2 单侧装置有限元分析
微力测量装置安装在三维海流传感器内,传感器空间有限,在不改变放大倍数的前提下,适当调整其结构形式。通过三维建模软件Pro/E建立机构的三维模型如图2所示。
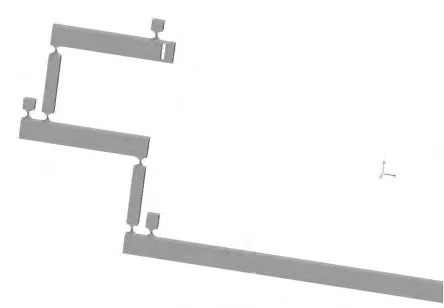
图2 单侧微力测量装置三维模型
将Pro/E与ANSYS的接口恰当设置,三维模型导入有限元软件ANSYS进行力学分析[13]。选用材料为钛合金TA1,钛合金具有比重低、强度高、耐热性高、耐蚀性好等特点,被广泛用于各个领域。TA1抗拉强度为343MPa,屈服强度为275MPa,泊松比为0.33,弹性模量为107GPa,密 度ρ= 4.5g/cm3[14]。 定 义 单 元 类 型 为20solid186,模型边界约束条件是柔性铰链B、E、H上表面为全约束,约束输出端查看其约束反力。在输入端加载不同质量的砝码,即加载垂直向下的不同大小的微力,在输出端得到放大的力以及产生的应变,计算结果见表2所列。

表2 单侧装置不同输入载荷分析结果
由表2可以看出,装置在输入端A加载不同质量的砝码,输出端I都可以输出稳定的力及应变响应,微力放大比达到747。输入端输入1μN时产生的应变值为1.27×10-8,应变值较小,需要进一步改进结构以增大应变。
1.3 单侧装置在重力场下分析
装置测量海流上升微力时需考虑重力影响。单侧装置在重力场下的变形云图如图3所示。
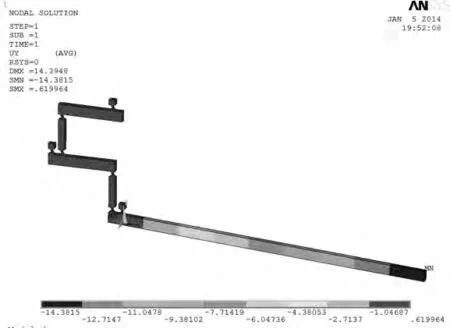
图3 重力场下单侧装置Y方向位移云图
由计算可知,在重力场下,单侧装置输入端空载位移达到14.38mm,输出端约束反力达到188.08N,最大应力为630.52MPa。位移偏移量远远超出不考虑重力时的输出位移,放大装置输出端由于重力作用产生的力也远远大于要测量的μN级别,且最大应力已超过钛合金的屈服强度。,因此,必须改进装置的结构来增大输出端应变并消除重力的影响。
2 装置改进
2.1 对称差动式结构
为消除重力影响、提高测量精度,将放大机构双侧对称布置,采用差动式结构。差动式垂直微力测量装置在重力场下的变形云图如图4所示。
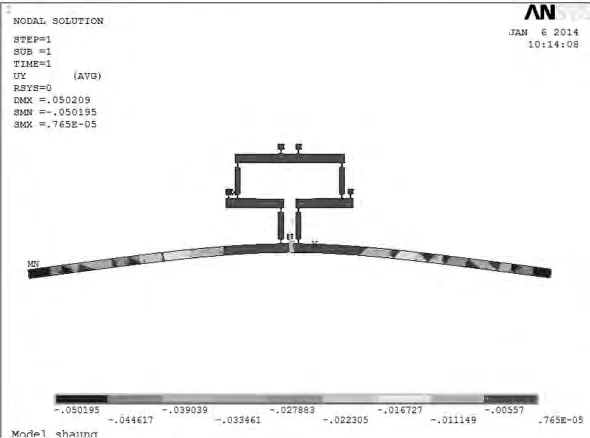
图4 重力场下差动式微力测量装置位移云图
由计算可知,装置输入端空载时位移为0.05mm,与单侧装置相比,下降了99.6%,有效减小了重力影响。输出端与单侧装置相比,差动结构更利于力应变片的布置,提高测量精度。
2.2 配重块设计
对称差动式装置有效地减小了自身重力对装置的影响,但一级杠杆对称布置时尺寸太大,二级、三级杠杆的自身重力也对测量结果产生较大影响,需进一步改进。根据力矩平衡和对称结构的原理,采用配重块代替装置的对称布置,将一级放大机构的重心调整到一级支点处,二级、三级杠杆中心调到各自的支点处,经计算确定杠杆所需配重块质量。同时一级杆采用变截面梁,进一步减小了杆件自身和配重块的重力。
2.3 输出端改进
微力经三级杠杆放大,在输出端产生应变,应变片在检测到应变之后将应变信号转变为电信号输出。本测量装置选用最为常用的箔式电阻应变片。为了产生足够应变,根据ε=σ/E,在输出端应选择应力较大的位置布置传感器。由σ=F/A可知,增大应力可增大载荷、减小横截面面积;由杠杆原理可知,力臂越短、载荷越大。综合以上因素,输出端的改进可以采取以下措施:① 靠近支点的位置布置应变片;② 减小应变片位置横截面的面积,对杆件开孔。最终确定的三维模型结构如图5所示。
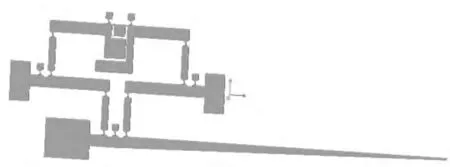
图5 改进后装置三维模型
3 差动式垂直微力测量装置分析
利用三维建模软件Pro/E建立装置模型,导入有限元软件ANSYS进行分析,经过约束和加载不同载荷后得到输出端应变,计算结果见表3所列。
由表3可知,在输入端输入微小力值,改进后的装置可以产生良好的线性应变,从而通过力传感器输出其响应。通过计算,输入端输入6μN时,输出端产生的应变为1×10-6。由表3和表2对比可知,装置经改进后输出端产生更大的应变,同时由计算可知,三级对称差动式配重的设计使输入端空载时在重力场下位移为39.235μm,与对称式布置装置相比,最大位移偏移下降了21.5%,与单侧装置相比下降了99.8%,基本消除了装置的自身重力影响。所以,装置的改进是成功的。
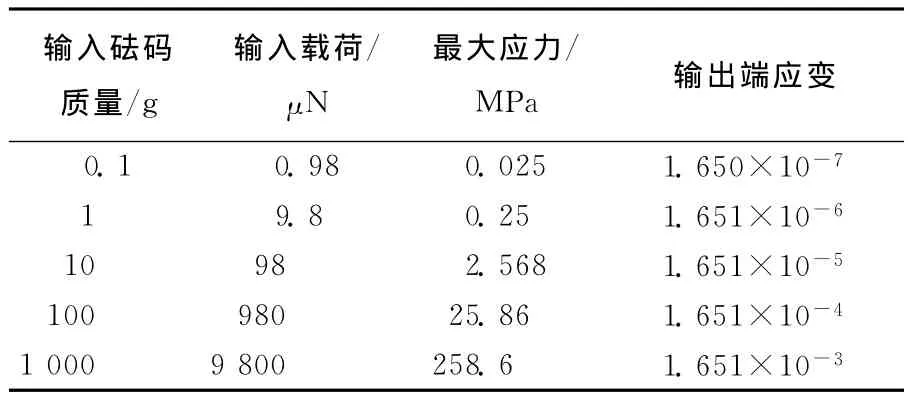
表3 改进后装置不同输入载荷分析结果
4 结束语
本文设计了一种垂直微力测量装置,此装置基于杠杆原理,以柔性铰链代替传统摩擦副铰链,在输入端输入μN级微力,经过3级杠杆放大机构,能够在输出端产生足够应变,并通过应变片和调理电路输出测量结果,实现微力的测量。此装置为三维瞬时海流传感器上升流微力的测量提供了技术支持,并且此装置利用对称配重的差动式结构基本消除了重力场的影响。此设计同时为微力的测量提供了一种新方法,为微小力值的测力系统提供技术支持,并且结构简单、操作方便、价格低廉、量程大,有良好的发展前景。
[1] 孙敬慧.三维流速传感器力标定系统的研究[D].合肥:合肥工业大学,2011.
[2] 闫 科.三维流速传感器的流场分析与结构设计[D].合肥:合肥工业大学,2012.
[3] 张正惕,杨世伦,谷国传.我国海洋测流仪器的发展与现状[J].海洋技术,1999,18(2):17-21.
[4] Jabbour Z L,Yaniv S L.The kilogram and the measurements of massand force[J].Journal of Research of the National Institute of Standards and Technology,2001,106(1):25-46.
[5] Koops K R.Calbration strategies for scanning probe metrology [J].Measurement Science and Technology,2007,18(2):390-394.
[6] Kim C J.Silicon electromechanical microgrippers:design,fabrication and testing[D].Univ Calif Berkeley,1991.
[7] 盛 阳,赵美荣,刘 明,等.超微力发生系统及电容采集模块的设计[J].传感技术学报,2010,23(10):1055-1057.
[8] 吴昌庆.微力标定与测量装置的若干关键问题研究[D].合肥:合肥工业大学,2012.
[9] 杨春晖.倒圆角直梁型柔性铰链柔性计算与分析[J].机床与液压,2013,41(3):55-57.
[10] 郑 双,高荣慧,王 勇.重力场下垂直微力发生装置的研究[J].合肥工业大学学报:自然科学版,2014,37(2):134-136,163.
[11] Han C S,Kim S H.Three-axis lever actuator with flexure hinges for an optical disk system[J].Review of Scientific Instruments,2002(73):3678-3686.
[12] Iafolla V,Nozzoli S,Fiorenza E.One axis gravity gradiometer for the measurement of Newton’s gravitational constant[J].Physics Letters A,2003,318(3):223-233.
[13] 李黎明.ANSYS有限元分析实用教程[M].北京:清华大学出版社,2005:171-173.
[14] Ezugwu E O,Wang Z M.Titanium alloys and their machinability:a review[J].Jounral of Materials Processing Technology,1997,68(3):262-274.
