大空间双模多频段射频识别复合定位*
2015-03-10李建宇张金艺蔡春艳张洪晖
李建宇,张金艺,,3*,蔡春艳,王 伟,张洪晖
(1.上海大学微电子研究与开发中心,上海200072;2.上海大学特种光纤与光接入网省部共建教育部重点实验室,上海200072;3.上海大学教育部新型显示与系统应用重点实验室,上海200072)
在飞速发展的情景感知技术中,服务对象的精确位置信息是最重要的环境参数之一[1]。目前以全球定位系统(GPS)为代表的卫星导航系统是获取目标室外位置信息的主要技术手段[2]。但在室内环境中,由于建筑物对卫星信号的严重干扰,卫星导航系统无法实现精确定位。射频识别RFID(Radio Frequency Identification)定位,以其成本低、标准化统一、定位精度高等特点,逐渐成为优选的室内定位技术,被广泛应用在物联网等领域[3]。
在RFID室内大空间定位过程中,为了保障定位区域的信号覆盖指标满足要求,RFID读写器天线需要大量密集布局,导致天线间存在着相互干扰问题。这种干扰使标签不能正确地被读写器识别,降低了RFID定位的准确性[4]。为实际解决读写器天线间信号干扰,EPC Gen2v2协议定义了读写器天线发送信号和标签响应信号工作在不同频段,但标签可能同时被两种频率的读写器天线激活,天线和标签间冲突仍然存在[5]。文献[6~8]中从通信协议角度研究读写器天线抗干扰算法,实际实现较为复杂。同时,室内环境中无线信号存在反射、散射、遮蔽现象和多径干扰,难以用精确的数学模型刻画环境对接收端信号的影响程度[9],这严重影响了RFID室内定位的精确度并导致定位复杂性的提升。RFID室内定位多采用基于场景的定位方式解决此问题。典型基于场景定位算法是以RSSI值为定位参数的LANDMARC算法[10]。LANDMARC算法实际应用中,标签之间存在差异性,室内复杂电磁环境下多径干扰严重,k最近邻加权方法中邻近标签选取不准,都将导致定位精度的下降。文献[11~12]对LANDMARC算法采用线性插值等方法进行改进,但实际环境中,RSSI与标签位置存在非线性关系,导致改进算法精度降低。
本文提出一种大空间双模多频段射频识别复合定位。首先分析密集布局读写器天线之间干扰影响,提出读写器天线区域选通方法,减轻读写器天线之间的干扰。考虑到室内环境因素对无线信号的影响,以固定时间内超高频频段读写器天线收包次数为定位参数,采用超高频改进型贝叶斯概率定位算法对被定位对象进行精确定位。实验验证表明,本文提出的大空间双模多频段射频识别复合定位,有效减轻了密集布局多读写器天线之间的干扰,同时,定位误差相对于LANDMARC算法降低了59.86%。
1 读写器天线选通技术
在室内RFID大范围空间定位中,多标签和多读写器等组成了大规模的RFID系统。在大规模的RFID系统中,读写器信号覆盖、读写器天线之间信号干扰、定位精度、负载均衡等是主要的研究问题。读写器信号覆盖常采用布局优化等覆盖策略。而目前针对读写器天线之间干扰的研究主要从通信协议算法角度出发,实现较为复杂,很难解决读写器天线之间干扰对定位精度和系统性能的影响。本文以被定位对象同时携带的有源和无源两种标签为基础,提出读写器天线区域选通技术,从系统层面减轻读写器天线之间干扰。
1.1 RFID读写器天线间干扰影响
在室内大空间RFID定位系统中,多个覆盖区域重叠的读写器天线同时工作,相互之间会产生信号干扰。具体包含两种情况:一种是读写器天线-读写器天线冲突,读写器天线接收标签响应信号时,受到其他读写器天线信号的干扰;另一种是读写器天线-标签冲突,由多读写器天线同时与一个标签通信引起。多读写器天线之间干扰受到读写器天线的放置方式和读写器天线接收最小功率等影响。考虑到大空间定位中定位精度、区域覆盖率和实现成本等方面,本文采用读写器天线网格化布局,针对本文读写器天线布局的天线间干扰影响如图1所示。
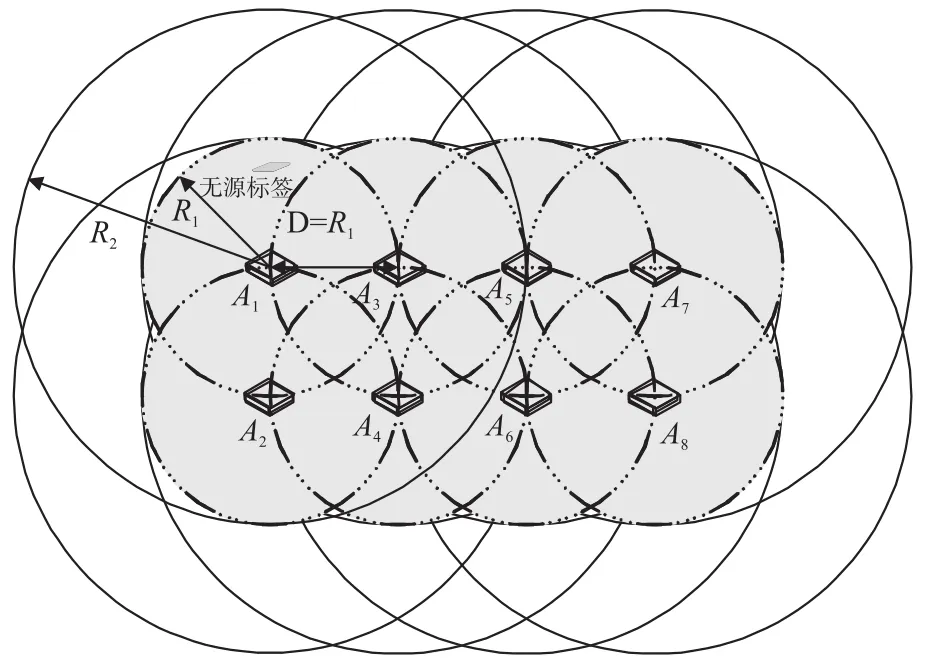
图1 网格化布局读写器天线间干扰
图1中A1~A8表示八个超高频频段读写器天线。R1表示标签有效检测区域半径,由读写器接收阈值信号强度决定。R2表示天线冲突区域半径,受天线信号实际的覆盖区域影响。D表示网格化布局天线之间的距离,本文中采用D与R1相等的分布方式。当无源标签位于图1所示位置时,无源标签仅处于天线A1的有效检测区域。由于读写器天线的冲突信号覆盖范围远远大于标签能被天线读到的有效范围,天线A2仍可以与标签通信,影响天线A1对标签信号的正确读取。并且,A1~A8同时工作时,A1处于A2、A3、A4、A5的信号覆盖范围内,A1将受其他同频率天线干扰。同样,图1中A2~A8工作时同样受到相应的天线干扰,严重影响RFID系统精度与效率。
1.2 读写器天线区域选通
本文提出的大空间双模多频段射频识别复合定位引入一种读写器天线区域选通方法,从系统层面解决多读写器天线干扰问题。本文定位系统的整体布局如图2所示。图2中,A1~A8表示八个超高频频段读写器天线。T1和T2表示被定位对象同时携带的无源标签和有源标签。无源标签T1与超高频频段读写器天线通信,对被定位对象进行精确定位。有源标签T2由三角形低频触发器S1激活,与微波频段阅读器通信。三角形低频触发器S1布置于四个超高频频段读写器天线的几何中心,调整三角形低频触发器信号的覆盖范围R,使其边沿经过天线A1~A4有效检测区域边沿的交点,这样S1的覆盖区域即为四个超高频频段读写器天线定位的有效区域。为保证A1~A4覆盖区域内不产生读写器天线-标签冲突,A1~A4以轮询方式与同一个读写器通信。S2与A5~A8按相同的方式布局。
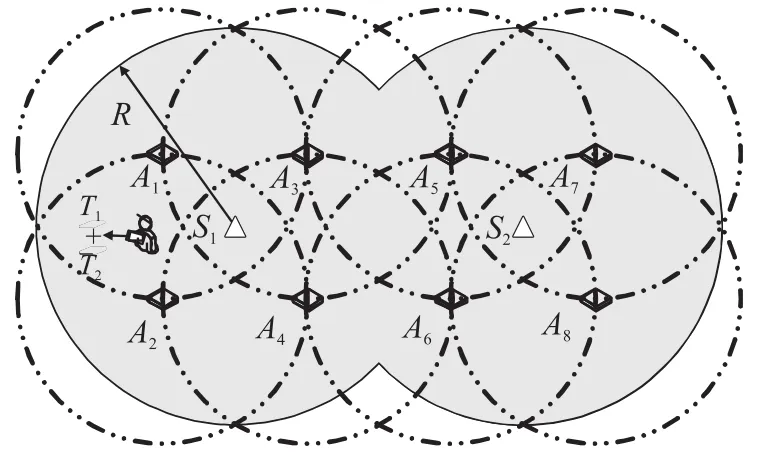
图2 定位系统整体布局
当被定位对象进入三角形低频触发器S1的信号覆盖范围内时,S1以低频频段信号激活T2,微波频段阅读器获取有源标签T2发送的S1编号等信息。根据微波频段阅读器获取的区域位置信息,开启S1信号覆盖区域内的超高频频段读写器天线。当被定位对象不在S1的信号覆盖范围时,A1~A4天线关闭。根据本文提出的读写器天线区域选通方法,被定位对象所处区域的四个超高频天线开启并轮询工作,其他读写器天线均处于关闭状态,减轻了密集布局读写器天线同时工作引起的天线间干扰问题,从而提高了大空间RFID定位的鲁棒性和精确度。
2 超高频改进型贝叶斯概率定位
考虑到大空间定位中环境因素对定位精度的影响,本文在读写器天线区域选通的基础上,以固定时间内超高频频段读写器天线收包次数为定位参数,采用超高频改进型贝叶斯概率定位算法确定被定位对象的精确位置。
2.1 定位参数分析
在射频识别定位中,标签信号强度的测量不需要额外硬件支持,易于获得,因而信号强度指示(RSSI)常作为定位参数[13]。考虑到真实环境中,信号的反射、散射或者遮蔽现象对信号强度的干扰,信号强度随距离的变化关系常用对数正态阴影模型(Log-normal Shadowing)来描述[9]:

式(1)中Pr(d)表示接收者在距离信号源d处接收到的信号强度;P0(d0)表示接收者在距离信号源d0处接收到的信号强度;η表示路径损耗参数,与实际环境相关;Xσ~N(0,σ2)为正态分布随机变量,表征信号反射、噪声等对接收者接收到的信号强度造成的影响。式(1)中,Pr(d)~N(μr,σ2),其中μr=P0(d0)-η10lg(d/d0)。因而距离信号源d处的RSSI值是服从正态分布的随机变量,测量值具有很强的随机性。若定位系统直接以RSSI值为定位参数,将会产生较大定位误差。
标签在距离读写器天线d处被读到概率为:

式(2)中,Pth为读写器接收阈值信号强度。
本文定义无源标签在距离读写器天线d处,发送M次数据包时,读写器接收到数据包次数为N。N是服从二项分布的随机变量,根据式(2),N~B[M,P(d)]。N变量包含距离约束,可作为定位参数。对比N和RSSI两种定位参数:RSSI值是读写器单次接收数据包的信号强度值,复杂电磁环境干扰时,稳定性差[14]。N变量是对读写器接收数据包次数的统计,相对于RSSI值稳定性好。同时,在概率定位算法中,由于Pr(d)~N(μr,σ2),若以RSSI值作为定位参数,离线阶段需要大量测量同一位置的RSSI值来统计推断正太分布函数,计算量过大,并且RSSI值正态分布概率密度函数复杂难求,影响定位算法效率。N变量服从离散型概率分布,分布函数简单,有利于降低定位算法复杂性。因而本文采用N变量作为定位参数。本文中超高频频段读写器的发包频率f为可设置的固定值。因而读写器天线发包次数M可以表示为:

式(3)中,t为固定的计时时间。
2.2 超高频改进型贝叶斯概率定位算法
2.2.1 离线数据训练
区域选通超高频频段读写器天线后,四个读写器天线处于工作状态。在读写器天线覆盖范围内规则地选取若干训练位置(l1,…,lm,lk)。定义在每个训练位置四个读写器天线固定时间内收包次数为N(N1,N2,N3,N4)。本文中超高频频段读写器发包频率设定为25 Hz,采集2 s内读写器天线读取次数,同时为保证定位的实时性,采用文献[15]中流水线数据获取方法。根据式(3)可得到M=50,因此N~B[50,P(d)]。为降低离线数据训练复杂性,令Nb~B[1,P(d)],则

对Nb分布函数中未知参数P(d)采用参数矩估计得:

根据式(4)、式(5)得:

图3所示的4个读写器天线采用轮询方式工作。因而4个读写器天线采集定位参数之间相互独立,位置lm处变量N的联合概率分布函数为

逐一采集图3中训练位置(l1,…,lm,lk)的定位参数N并根据式(7)计算相应的联合概率分布函数,得到读写器天线覆盖区域的离线数据库。
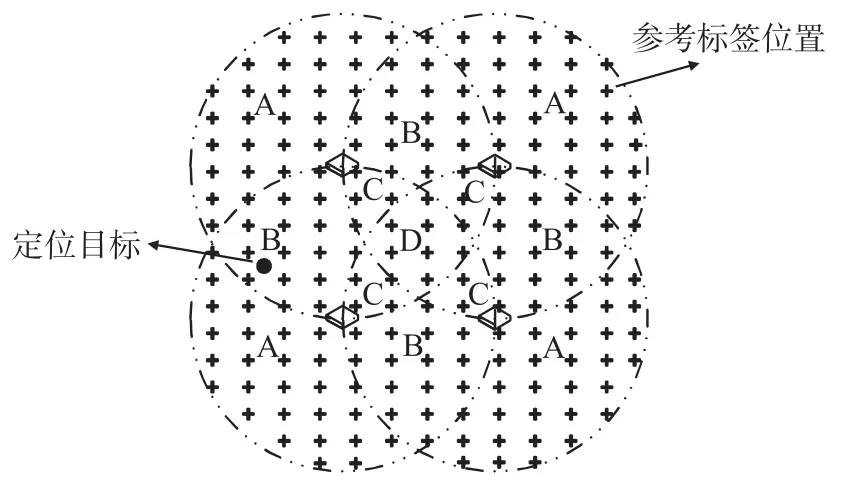
图3 离线数据训练
2.2.2 被定位对象位置计算
定义读写器天线在被定位对象处2 s内收包次数为NO(no1,no2,no3,no4)。离线阶段的k个训练位置可认为是预先已知的k个类。决策出被定位对象所属的类,即可计算出被定位对象的位置,本质上属于模式匹配问题。
根据贝叶斯规则

式(8)中,P(lm/N0)表示当2 s内收包次数为N0时,被定位对象位于位置lm的后验概率;P(N0/lm)表示被定位对象位于位置lm时,2 s内收包次数为N0的条件概率,具体可由离线训练数据及式(7)中的分布函数求得;P(lm)表示先验概率,由于被定位对象随机出现在定位区域,先验概率可以设为均匀分布;P(N0)为固定常数,不影响离线训练数据之间的比较。根据贝叶斯最小错误判决准则,在k个类的情况下,

则判决N0属于lm类。因此根据式(8),在离线数据库中P(N0/lm)最大的位置lm即为被定位对象的最终位置(x1,y1)。
为了降低概率算法在离线数据库中的查找复杂度,并且进一步提升定位算法精度,本文对传统贝叶斯概率定位算法进行改进。如图3所示,将读写器天线覆盖区域分成A,B,C,D四个区域,具体规则如式(10)中所示。
在离线数据库中查找最大P(N0/lm)值时,首先根据NO(no1,no2,no3,no4)的数值初步判断出被定位对象所在区域,然后在区域中查找最值,可以降低筛选复杂程度,提升准确度。
定义欧几里得公式:
式(11)表示被定位对象与离线训练类在变量N空间的欧几里得距离。根据最邻近算法,当Da取最小值时,N对应坐标最可能为被定位对象的位置。本文在确定被定位对象(A,B,C,D)的分区后,利用式(11)计算被定位对象的最可能坐标(x2,y2)。坐标(x2,y2)可以作为式(9)中结果的修正值,因而对贝叶斯概率定位算法修正后的最终位置坐标为

式12中,利用(x1,y1)和(x2,y2)的平均值对贝叶斯概率定位结果进行修正,进一步提高了定位结果的稳定性和精确度。
3 验证系统构建与结果分析
3.1 验证系统构建
本文验证定位系统的硬件由中央处理器、路由器、营信YXU2881型超高频RFID电子标签读写器、超高频读写器天线、无源电子标签、秀派SP-RFS-500-001型2.4 GHz阅读器、秀派三角形低频触发器、2.4 GHz有源电子标签组成,如图4所示。超高频RFID电子标签读写器工作频率范围为902 MHz~928 MHz,输出功率设定为25 dBm,接收阈值功率Pth=-80 dBm。秀派三角形低频触发器的工作频率为115 kHz。
本文验证定位系统在一个6.8 m×9.4 m的室内房间内搭建。8个超高频读写器天线水平放置于天花板上,2个三角形低频触发器水平布局在地板上。定位人员同时携带2.4 GHz有源电子标签和超高频无源电子标签,以完成被定位对象的精确定位。

图4 验证定位系统架构
3.2 实验结果与分析
以下对大空间双模多频段射频识别复合定位的多天线抗干扰性和定位误差进行分析。为了验证区域选通超高频频段读写器天线方法对大空间RFID定位系统中密集布局读写器天线干扰的改善效果,本文在离线数据库中随机选取15个位置作为分析节点。根据图4,当单一读写器工作时,读写器天线在被定位对象处2 s内收包次数N(n1,n2,n3,n4)不受多读写器天线干扰。定义

N1sum表示分析节点区域所对应的读写器单独工作时各天线的收包次数之和,N2sum表示RFID定位系统实际工作时相同天线的收包次数之和。N1sum与N2sum差的绝对值越小,多读写器天线间干扰越小。实验结果如图5所示,图5中曲线表示不同位置|N1sum-N2sum|的连线,N1sum与N2sum的最大绝对值差为3,较好地减轻了多读写器天线间的干扰。本文提出的区域选通超高频频段读写器天线方法,对RFID读写器性能要求不高,不需要复杂的算法,从系统层面实际有效地减轻了多读写器天线间干扰与冲突,适用于读写器天线密集布局的大空间定位。
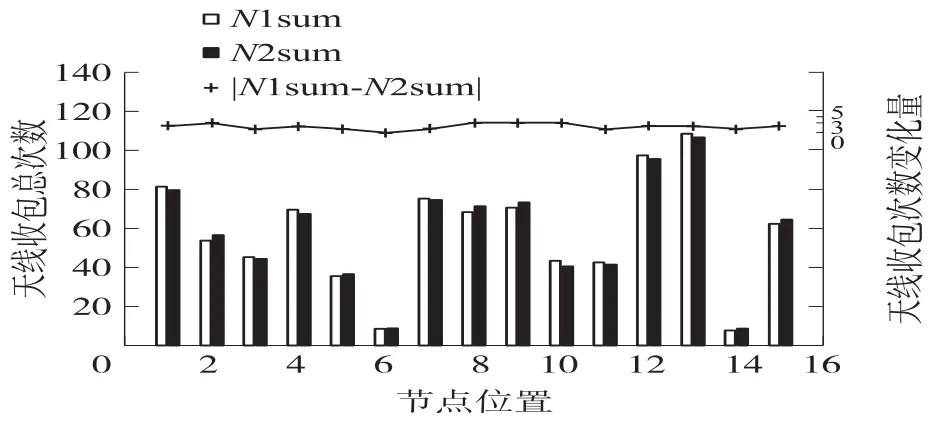
图5 多读写器天线冲突分析
定位误差是精确定位最重要的评价参数之一。定位误差越小,定位算法性能越好。本文在定位区域中,随机选取15个位置,每个位置根据大空间双模多频段射频识别复合定位重复测量计算30次,将定位误差取平均值,得到图6中所示结果。本文与经典的LANDMARC定位算法进行比较分析,LANDMARC算法的平均误差为1.04 m,本文的改进型贝叶斯概率定位算法的平均定位误差为0.42 m,最大定位误差为0.72 m,平均定位误差比LAND⁃MARC算法降低了59.86%。由实验结果不难发现,本文大空间双模多频段射频识别复合定位所采用的超高频改进型贝叶斯概率定位算法较LAND⁃MARC算法优势明显。

图6 定位误差比较
在概率定位算法中,受定位空间中电磁环境的影响,信号传播模型不完善,RSSI值的正态分布概率分布函数难以准确获得,因而本文以固定时间天线收包次数为定位参数。N变量相对于RSSI值具有更好的稳定性,并且其概率分布函数服从二项分布,便于离线阶段快速准确地训练数据。同时,本文的改进型贝叶斯概率定位算法在位置计算阶段采用区域查找与欧式距离修正,对传统贝叶斯定位算法改进,提高定位效率与精度。
4 结语
针对大空间RFID定位中密集布局读写器天线间干扰与定位精度不高问题,本文提出了大空间双模多频段射频识别复合定位。对于覆盖区域重叠的读写器天线,采用读写器天线区域选通技术,根据三角形低频触发器覆盖范围内的有源标签信号,区域性开启读写器天线,减轻了多读写器天线间的干扰。同时,本文以固定时间读写器天线收包次数N变量为定位参数。由于天线收包次数N变量是一段时间的累计统计,较瞬时的RSSI值稳定性强。同时N变量服从离散型概率分布,提高了离线阶段数据训练的准确性与效率。本文在概率定位算法上,对传统贝叶斯概率定位进行了改进。在被定位对象位置计算阶段,提出区域查找最大后验概率,极大减少了查找的复杂度;利用被定位对象与离线训练类在变量N空间的欧几里得距离选取最大可能位置,修正概率定位坐标,提高定位精度。经试验验证,大空间双模多频段射频识别复合定位,较好地减轻了密集布局多读写器天线间干扰,并且与经典LANDMARC定位算法相比,定位误差降低了59.86%。本文提出的设计具有良好的扩展性,为今后大空间领域定位与跟踪奠定了良好的基础。
[1]Fadzillah N A A,Omar N,Abidin S Z Z.Application-based Con⁃text-Awareness in Collaborative Workspaces:A Review[C]//Pow⁃er Engineering and Optimization Conference,Melaka:IEEE,2012:411-415.
[2]YANG Fan,Dong Aoshuang.A Solution of Ubiquitous location based on GPS and Wi-Fi ULGW[C]//Hybrid Intelligent Systems,Shenyang:IEEE,2009:260-230.
[3]Eslim Lobna M,Hassanein Hossam S,Ibrahim Walid M,et al.A Cooperative Localization Scheme Using RFID Crowdsourcing and Time-Shifted Multilateration[C]//Local Computer Networks,Ed⁃monton,AB:IEEE,2014:185-192.
[4]刘嵩岩,綦志强,苟鹏飞.超高频RFID系统信号损失与覆盖模型研究[J].哈尔滨工程大学学报,2008,29(2):162-166.
[5]EPCglobal.EPCTMRadio-Frequency Identity Protocols Generation-2 UHF RFID Specification for RFID Air Interface Protocol for Communications at 860MHz-960MHz Version 2.0.1 Ratified[EB/OL].http://www.gs1.org,2015.
[6]张凯,薛小平,王小平.基于IRCM的抗阅读器冲突协议[J].计算机应用与软件,2008,25(12):182-184.
[7]Song InChan,Hong SungHyun,Chang KyungHi.An Improved Reader Anti-collision Algorithm based on Pulse Protocol with Slot Occupied Probability in Dense Reader Mode[C]//Vehicular Technology Conference,Barcelona:IEEE,2009:1-5.
[8]Kang Youngchang,Kim Minjae,Lee Hyuckjae.A Hierarchical Structure based Reader Anti Collision Protocol for Dense RFID Reader Networks[C]//Advanced Communication Technology,Seoul:IEEE,2011:164-167.
[9]杨铮,吴陈沭,刘云浩.位置计算:无线网络定位与可定位性[M].北京:清华大学出版社,2014:7-31.
[10]Ni Lionel M,Liu Yunhao,Lau Yiu Cho,et al.LANDMARC:In⁃door Location Sensing Using Active RFID[C]//Pervasive Comput⁃ing and Communications,Fort Worth,TX:IEEE,2003:407-415.
[11]Zhao Yiyang,Liu Yunhao,Ni Lionel M.VIRE:Active RFID-based Localization Using Virtual Reference Elimination[C]//Par⁃allel Processing,Xi'an:IEEE,2007:56.
[12]Saber Seyyedi,Behzad Akbari,et al.Using Virtual Reference Tags to Improve Accuracy of Active RFID-Based Positioning Sys⁃tems[C]//Communication Systems and Network Technologies,Bhopal:IEEE,2014:1078-1081.
[13]程秀芝,朱达荣,张申,等.基于RSSI差分校正的最小二乘-拟牛顿定位算法[J].传感技术学报,2014,27(1):123-127.
[14]陈淑敏,乔晓田,毛佳,等.基于接收信号强度(RSSI)的室内二次定位方法[J].传感技术学报,2015,28(4):572-577.
[15]张金艺,张晶晶,李若涵,等.流水线型局部加权回归RFID室内定位[J].应用科学学报,2014,32(2):125-132.