区域反导传感器协同任务规划研究*1
2015-03-10刘邦朝,王刚
区域反导传感器协同任务规划研究*1
刘邦朝,王刚
(空军工程大学 防空反导学院,陕西 西安710051)
摘要:区域反导传感器协同任务规划是区域反导指控任务规划的重要环节,其核心是多传感器的协同优化部署和资源优化分配问题。对区域反导传感器协同任务规划的部署流程和协同规划流程进行了分析,研究了传感器部署策略和协同策略。并在协同规划的基础上对传感器资源分配进行了仿真分析。
关键词:区域反导;传感器协同;任务规划
0引言
随着弹道导弹防御的发展,反导体系已由传统的武器为中心向网络为中心发展。在这一前提下,高效的多传感器协同对反导作战极为重要。在美军2013年的2次反导试验中,前置部署的X波段雷达成功地将靶弹的探测信息传输导弹防御系统的作战单元,进而引导“宙斯盾”导弹防御系统和“末段高空区域防御系统”的雷达发现目标,实现目标的拦截。由此,可以看出区域反导传感器协同对反导作战的关键性作用。
对区域反导作战而言,地基多功能跟踪雷达和火控雷达属于2类高精度的雷达,地基多功能跟踪雷达具有较强的探测能力,具备在火控雷达之前探测目标的能力。火控雷达偏重于满足武器系统拦截弹道目标的需求,两者的协同对反导作战效能有较大的提升,同时也对传感器协同任务规划提出了更高的要求。
从反导作战流程出发,区域反导传感器协同任务规划主要研究地基多功能跟踪雷达与火控雷达的协同部署、传感器作战任务的优化分配和协同策略,侧重地基多功能跟踪雷达与火控雷达协同中的引导和资源优化问题。强调2类传感器之间的协同探测、跟踪和识别的策略和资源分配。形成传感器的部署和协同作战规则,实现有限传感器资源的优化利用。
1传感器部署规划
传感器部署属于反导传感器协同任务规划的初始,传感器的合理部署带来最直接影响就是实现传感器资源的最大化利用,扩大防御区域,针对重点防御区域和重点目标实现有效的覆盖和对抗。
1.1部署规划流程
传感器的部署具有较长的时间持续性,协同部署的结果对反导作战的效能具有较大的影响。部署需要考虑保卫要地和潜在威胁区域的分布以及传感器自身的性能,根据传感器的探测性能、保卫要地数据和潜在威胁数据获得单传感器部署规划。根据协同部署策略,以最大化探测效能、探测的完备性和最低传感器消耗为约束条件,得到传感器协同部署规划。
1.2部署规划
根据传感器的位置,探测方位以及阵面倾角即可确定传感器的部署。
(1) 传感器位置选择
由于反导作战具有明确的方向性和保卫目标的确定性,传感器的部署区域内将会存在多个保卫目标和多个威胁,地基多功能跟踪雷达的部署主要考虑潜在威胁方向和主要防御区域2点,部署的地基多功能跟踪雷达需对弹道目标轨迹进行有效覆盖,确保检测的时间性。在火控雷达的协同部署方面,需要确保火控雷达对于地基多功能跟踪雷达资源的有效利用以及防御区域的有效覆盖。
(2) 传感器方位选择
传感器方位选择目的是确定传感器探测的最佳方位,地基多功能雷达阵面指向相对固定,量测精度随着目标偏离天线阵面法向增大而降低。已有的研究表明,当阵面指向与目标方位的夹角在0~20°时,可以认为这个角度范围内阵面指向对探测和测量性能的影响很小,可以忽略不计[1-6]。
在威胁区域较为密集的情况下,传感器阵面指向较容易确定。在威胁区域较为分散时,应根据潜在威胁的威胁度选择传感器阵面指向,威胁度较大的区域应首先确保0~20°的夹角覆盖范围内。
(3) 阵面最佳倾角
在给定的扫描空域内,雷达天线阵面需倾斜一定的角度使雷达波束均匀扫过作用空域各端点,达到最佳的性能[7]。

(1)
式中:θT为阵面最佳倾角;-Az~Az为方位扫描范围;El1~El2为俯仰扫描范围。
1.3协同部署策略
设第i传感器的能力半径为Ri,弹道轨迹与传感器交叠区域的距离为Sij。设wi为潜在威胁区域的威胁度,wi∈[0,1],vi为目标速度;wj为保卫目标的重要度,wj∈[0,1]。
针对特定的传感器,定义其效能参数:

(2)
式中:n为威胁区域数量;m为保卫目标。
由式(2)可以看出,在防御区域和保卫要地确定的条件下,协同部署需要使Zi尽量大。
针对多传感器的协同部署,需保卫要地的传感器防御能力为P,Pij表示第i个传感器对攻击第j个保卫要地目标的探测能力,则

(3)
以较少的传感器解决一定区域的防御覆盖也是需要考虑的因数。在确保防御能力的基础上降低传感器的重复覆盖率β。即
(4)
式中:M为保卫要地数目;N为M个要地被传感器探测覆盖次数的累加。
2传感器协同规划
地基多功能跟踪雷达与武器系统火控雷达协同作战过程包含引导截获、协同跟踪、协同识别、杀伤效果评估4个部分。由于杀伤效果评估可看作协同识别效果判断的延伸,所以可将其协同规划过程中分为3个阶段。
2.1协同规划流程
根据反导传感器作战流程及其任务描述,形成整个区域反导传感器协同规划流程,具体见图1。
2.2传感器协同任务分配
作为区域反导作战的传感器部分,可以根据前端传感器预警信息形成交战序列组合(ESG),确定参与区域反导作战的具体传感器。基于时间可探测的传感器任务的预分配是传感器协同任务规划的第1步。
弹道目标为Ti,地基多功能跟踪雷达组为Gj,武器系统火控雷达组为Wk,第i个目标的飞行可截获时间[ti0,til],第j个地基多功能跟踪雷达可用探测时间[tj0,tjm],第k个武器系统火控雷达可用探测时间[tk0,tkn]。需明确,根据ESG确定的传感器组Gj和武器系统火控雷达组Wk具有协同作战的条件,需要确定有效的
任务分配准则:
(1) 分配的完备性准则。确保来袭目标的完全分配,对于火控雷达较难或者不能有效探测的目标,地基多功能跟踪雷达将对其进行全程的探测。
(2) 火控雷达任务分配的时间性准则。火控雷达能对目标进行有效的探测需要满足。{tk0,tkn}∩{ti0,til}≠∅ 且探测时间Δt小于火控雷达与目标交叠时间。
在预分配确定的有效组合的基础上实现组合的优选。具体准则:
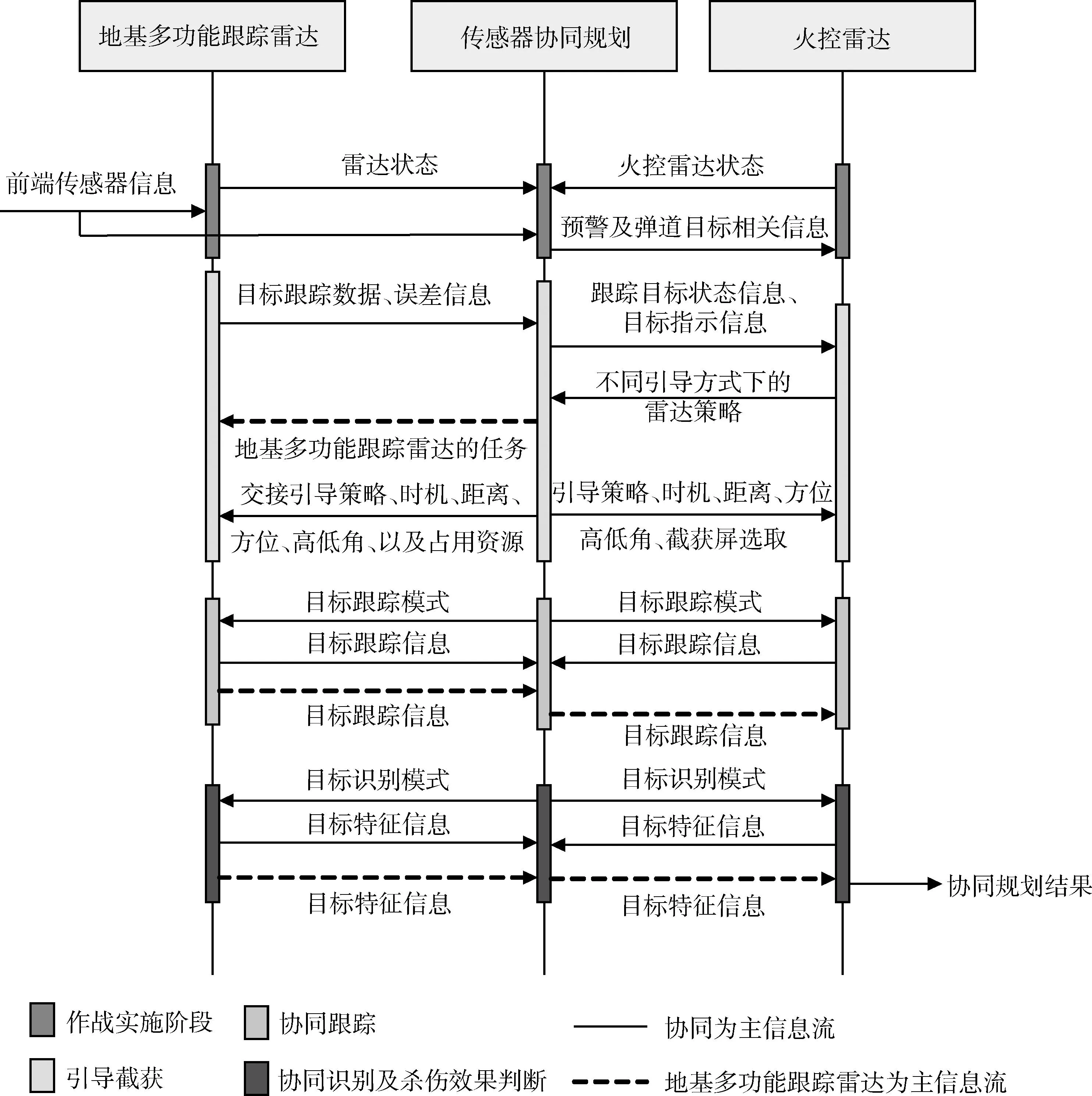
图1 传感器协同规划流程Fig.1 Process of sensor collaborative task planning
(1)tjn-tk0越大,即武器系统火控雷达和地基多功能跟踪雷达有较长的协同时间确定
(2) 当某一雷达已有较优的组合时,需削弱其进行新组合的能力,确保对探测资源的有效利用。
2.3传感器协同策略[8-10]
在优化传感器任务分配的基础上,研究组合内部以及组合之间的协同策略。组合内部主要解决的问题,包括引导策略、协同跟踪策略、协同识别及协同杀伤效果判断。组合之间主要解决传感器之间的资源竞争约束。
(1) 引导截获策略
地基多功能跟踪雷达对于火控雷达的引导方式包括单步长预测引导、分段长预报引导和单步引导方式。对于火控雷达的搜索来说,影响其探测性能的主要是预警系统所提供的引导信息的误差统计特性[1]。根据地基多功能跟踪雷达引导信息的精度以及可用资源和火控雷达的能力确定引导交接的方式和交接时机。同时,确定火控雷达的搜索方式和截获窗的选取。
(2) 协同跟踪策略
地基多功能跟踪雷达与火控雷达的协同跟踪包括数据配准、数据关联和融合估计几个方面。协同跟踪实现对弹道目标的中末段轨迹以及落点的精确预测,达到对目标的实时机动检测与跟踪的目的。数据关联和融合估计的精度将直接关系到弹道目标最终的拦截效果。
(3) 协同识别策略及杀伤效果判断
地基多功能跟踪雷达与火控雷达的协同识别主要研究2类传感器的融合结构和融合方式问题。融合的过程需满足时间性。时间性即为确定目标识别的关键过程,所有目标识别资源,都要服从相关关键过程的时间性要求。
地基多功能跟踪雷达与火控雷达的协同拦截效果判断提升了防御系统拦截后的效果判断能力。拦截效果判断基于3点,拦截弹状态、目标参数变化以及目标成像。主要的数据处理过程可看作协同识别的后续。
3基于协同规划的实例分析[11-13]
假定存在威胁区域1和威胁区域2,区域反导传感器为地基多功能跟踪雷达G1和G2,武器系统火控雷达W1和W2。地基多功能跟踪雷达G1对目标T1和T2的探测的径向距离为G11[650,300]km和G12[650,400]km,交叠区域距离为495和289 km;G2对目标T2和T3的探测的径向距离为G22[650,400]km和G23[650,150]km,交叠区域距离为258和402 km。武器系统火控雷达W1能够对弹道目标T1和T2进行有效探测,探测平均距离为150和200 km。由于干扰,W2对弹道目标T3不具备探测能力。以G23起点为探测时间的初始点,假定目标的速度2.5 km/s。G11,G12,G22的起始时间为75,90和20 s。确保同等探测条件下,根据探测距离与搜索资源的关系,以有效的探测时间进行权值分配,计算传感器搜索资源的分配。
规划方案:
(1) 根据分配的完备性准则确定有效的任务分配关系,由于W2对弹道目标T3不具备探测能力,

图2 传感器协同策略关系Fig.2 Relationship of the sensor collaborative strategy
需要地基多功能跟踪雷达为末段拦截提供精确地制导信息,将对G2资源有较大占用。详细的任务分配组合见表1。
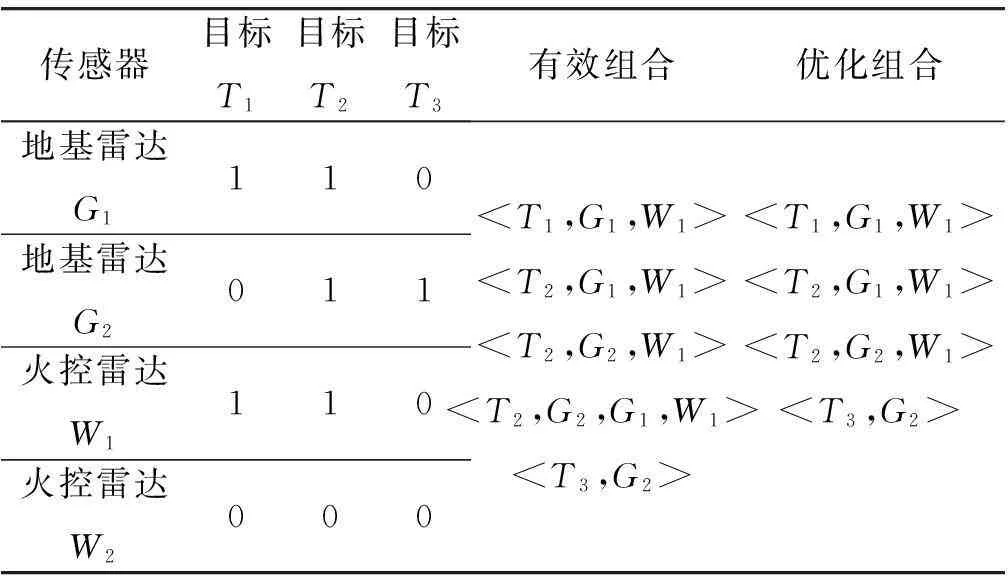
表1 传感器任务分配组合
注:表中1表示传感器对目标具备探测能力,0表示传感器对目标不具备探测能力
(2) 根据任务分配组合,由可探测性可知,T1和T2均可采用单步长预测引导、分段长预报引导和单步预测引导。由于G1和G2均可对目标T2进行探测,使得T2具有较高的探测精度,加之由于T3目标需由G2独立探测,具有较高的资源消耗。综合分析得出,T1采用单步预测引导方式,T2采用分段长预报引导。
(3) 根据1和2的规划方案,确保同等探测条件下,根据探测的协同与否,确定的地基多功能探测雷达的资源分配结果如图3~6所示。

图3 G1为T1分配资源比例Fig.3 Resource allocated proportion of G1to T1

图4 G1为T2分配资源比例Fig.4 Resource allocated proportion of G1to T2
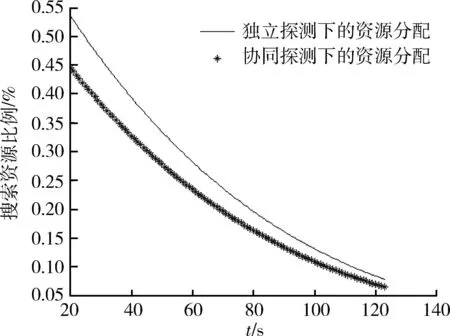
图5 G2为T2分配资源比例Fig.5 Resource allocated proportion of G2to T2
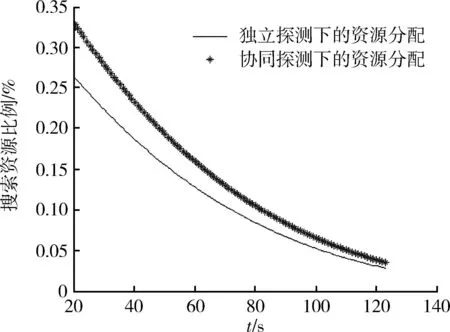
图6 G2为T3分配资源比例Fig.6 Resource allocated proportion of G2to T3
由图3~6可知,在协同引导阶段,传感器探测的资源分配随着探测时间的累积呈下降趋势。在协同探测条件下,针对探测条件较差的目标T3,需要增加传感器分配的探测资源比例以确保其探测精度。T2由于采用分段长预报引导,精度要求较高,对于直接参与引导的G1对其分配的资源也有所增加。由于T3对资源的占用,需要降低G2对于T2的资源分配比例。
4结束语
本文首先对区域反导传感器协同任务规划中的传感器部署和协同的规划流程进行了分析,研究了协同的部署策略和传感器协同策略。最后进行了基于协同规划的实例分析,资源分配结果表明,传感器协同规划使传感器资源分配得到优化,资源分配比例趋于合理。对区域反导传感器协同规划的研究对于如何提升区域反导传感器的作战能力具有重要作用。
参考文献:
[1]赵锋.弹道导弹防御跟踪火控雷达探测技术研究[D].长沙:国防科技大学,2007.
ZHAO Feng. Study on Detection Techniques of Tracking and Guiding Radars in Ballistic Missile Defense[M].Changsha:National University of Defense Technology,2007.
[2]吴林锋,王刚,刘昌云,等.基于多智能体的反导传感器任务规划算法[J].现代防御技术,2012,40(3):88-93.
WU Lin-feng, WANG Gang,LIU Chang-yun,et al.Task Programming of Antiballistic Missile Sensors Based on MAS[J].Modern Defence Technology, 2012,40(3):88-93.
[3]董涛,刘付显,郭新鹏,等.反导任务规划的重叠模式分析[J].解放军理工大学学报:自然科学版,2013,14(4):453-458.
DONG Tao,LIU Fu-xian,GUO Xin-peng,et al. Overlapping Mode of Anti-Missile Mission Planning[J]. Journal of PLA University of Science and Technology:Natural Science ed.2013,14(4):453-458.
[4]王刚,王明宇,杨少春,等.反导作战管理技术研究[J].现代防御技术, 2012,40(1):26-30.
WANG Gang,WANG Ming-yu,YANG Shao-chun,et al. Research of Anti-Missile Battle Management Technique[J].Modern Defence Technology , 2012,40(1):26-30.
[5]李益龙,王萍.海上编队传感器管理[J].指挥信息系统与技术,2013,4(5):24-29.
LI Yi-long,WANG Ping.Sensor Management of Naval Formations[J]. Command Information System and Technology ,2013,4(5):24-29.
[6]董涛,刘付显,李响.末段多层反导作战的任务分解[J].现代防御技术,2012,40(4):17-20.
DONG Tao,LIU Fu-xian,LI Xiang.Task Decomposition of Terminal Phrase Multilayer Antimissile Operation[J].Modern Defence Technology ,2012,40(4):17-20.
[7]胡卫东,郁文贤,卢建斌,等.相控阵雷达资源管理的理论与方法[M].北京:国防工业出版社,2010.
HU Wei-dong,YU Wen-xian,LU Jian-bin,et al.Phased Array Radar Resources Management Theory and Method[M].Beijing:National Defence Industry Press,2010.
[8]黄俊,滕鹏,于磊,等.C4ISR多传感器跟踪资源协同分配方法研究[J]. 系统仿真学报, 2009, 21(3):851-855.
HUANG Jun, TENG Peng,YU Lei,et al. Research on Coordinated Allocation of C4ISR Multi-Sensor Tracking Resource[J].Journal of System Simulation, 2009, 21(3):851-855.
[9]杨海燕, 尤政, 王琳. 协同网络下分布式跟踪的动态传感器管理[J]. 华南理工大学学报:自然科学版,2012, 40(3):49-56.
YANG Hai-yan,YOU Zheng,WANG Lin.Dynamic Sensor Management for Distributed Tracking in Collaborative Network[J].Journal of South China University of Technology:Natural Science ed,2012, 40(3):49-56.
[10]严江江,袁鸿翼,关世义,等.体系对抗下的任务规划技术[J].战术导弹技术, 2010(3):12-15.
YAN Jiang-jiang,YUAN Hong-yi,GUAN Shi-yi,et al.Mission Planning Technology Based on Systems Counterwork[J]. Tactical Missile Technology, 2010(3):12-15.
[11]周延延,黄树彩,任宝祥.导弹预警卫星的引导能力评价方法[J].空军工程大学学报:自然科学版,2011,12(4):23-27.
ZHOU Yan-yan,HUANG Shu-cai,REN Bao-xiang.Cueing Capability Evaluation Method of Missile Early-Warning Satellites[J].Journal of Air Force Engineering University:Natural Science ed,2011,12(4):23-27.
[12]姚勇,李智. 基于网络中心战的C2BMC信息分发模型研究[J].现代防御技术,2011,39(3): 96-102.
YAO Yong,LI Zhi.Research of C2BMC Information Dissemination Models Based on Network Centric Warfare[J]. Modern Defence Technology, 2011,39(3): 96-102.
[13]金林.弹道导弹防御系统综述[J]. 现代雷达,2012,34(12):1-7.
JIN Lin.Overview of Ballistic Missile Defense System[J].Modern Radar,2012,34(12):1-7.
Sensors Collaborative Mission Planning in Regional Antimissile
LIU Bang-chao, WANG Gang
(AFEU, Air and Missile Defense College, Shaanxi Xi′an 710051, China)
Abstract:The sensors collaborative mission planning of the regional antimissile is the important link of command and control mission planning. The sensors′ deployment and the allocation of resources optimization are the core problems of the sensors collaborative mission planning. The process of the sensors′ deployment and the collaborative mission planning are analyzed. The strategy of the deployment and collaborative are researched. A simulation of the resource allocate is made based on the collaborative mission planning result.
Key words:regional antimissile; sensors collaborative; mission planning
中图分类号:TJ761.7;E917;TP212
文献标志码:A
文章编号:1009-086X(2015)-06-0093-06
doi:10.3969/j.issn.1009-086x.2015.06.016
通信地址:710051陕西省西安市长乐东路甲字一号E-mail:1023662018@qq.com
作者简介:刘邦朝(1990-),男,四川泸州人。硕士生,主要研究方向为传感器管理。
*收稿日期:2014-06-13;修回日期:2014-10-29
