具有高阶运动的机动目标微多普勒信号提取方法
2015-03-08李彦兵高红卫李宝柱叶春茂
李彦兵 高红卫 李宝柱 叶春茂
(北京无线电测量研究所,北京100854)
引 言
雷达目标在运动时,若自身存在诸如翻滚、进动等动作,或者目标上存在相对于目标主体的运动部件,如直升机的旋翼、人四肢的摆动等,这些运动被称为微动.当雷达发射波照射目标时,微动会对雷达回波产生调制现象,被称为微多普勒效应.美国海军实验室的V.C.Chen教授对典型的微运动形式——旋转和振动进行了系统地分析,并将微多普勒效应这一概念首次引入雷达领域[1].他们的工作使得人们加深了对雷达领域中微多普勒调制现象的理解,使得针对微多普勒的研究逐渐成为雷达领域的热点[2-8].事实上,对于自然界中的许多物体,不论是人造的还是自然的,是机械还是动物,在其运动时都能够产生微多普勒调制现象.由于不同的物体其微动形式是有差异的,这些差异性通过微多普勒效应反映在雷达回波中.因而,对于微多普勒效应的研究能够为我们提供关于雷达目标的更多信息,为现有的雷达目标识别方法提供一个新的途径,或成为现有一些成熟识别技术的有力补充.
若目标运动时具有微动,则微动引起的微多普勒调制会叠加于目标整体的平动之上,体现为以目标多普勒为中心,分布于两侧的一系列多普勒频率分量[1].为了提取目标的微多普勒,需要对目标的整体运动进行补偿.实际中,目标运动时通常是机动的,即目标的速度是时间的变量,因此目标的多普勒频率不再是常量.当目标加速度恒定时,多普勒随时间呈线性变化,雷达回波信号具有线性调频的特点,可以通过Chirp-Fourier变换方法进行运动补偿[9],提取目标微多普勒;当目标加速度随时间变化时,目标整体运动引起的多普勒是随时间变化的曲线,对于这类存在高阶运动分量的运动补偿,Chirp-Fourier变换等方法不再适用.本研究工作即是针对存在高阶运动情况下,目标的微多普勒提取技术.
1 经验模态分解简介
经验模态分解(Empirical Mode Decomposition,EMD)对信号进行分解时,并不预先设定一组基,其分解出的各分量信号是直接从信号中获得的.其分解结果随着信号特性的变化而变化,分解得到的分量被称为本征模态函数(Intrinsic Mode Function,IMF)[10-11],IMF并没有被约束成为一个单频信号,也并没有被约束成为一个窄带信号,且可以是频率和幅度调制的.因此,在经验模态分解中,IMF是一个可以包含一定带宽的基本信号.EMD的分解结果即是由一系列频率由高到低的IMF分量所构成.
EMD算法包含两个嵌套的循环,如图1所示.其中,内循环是EMD分解的核心,可以形象地称为“筛”过程.给定一个信号s,“筛”过程的实现步骤如下[10-11]:
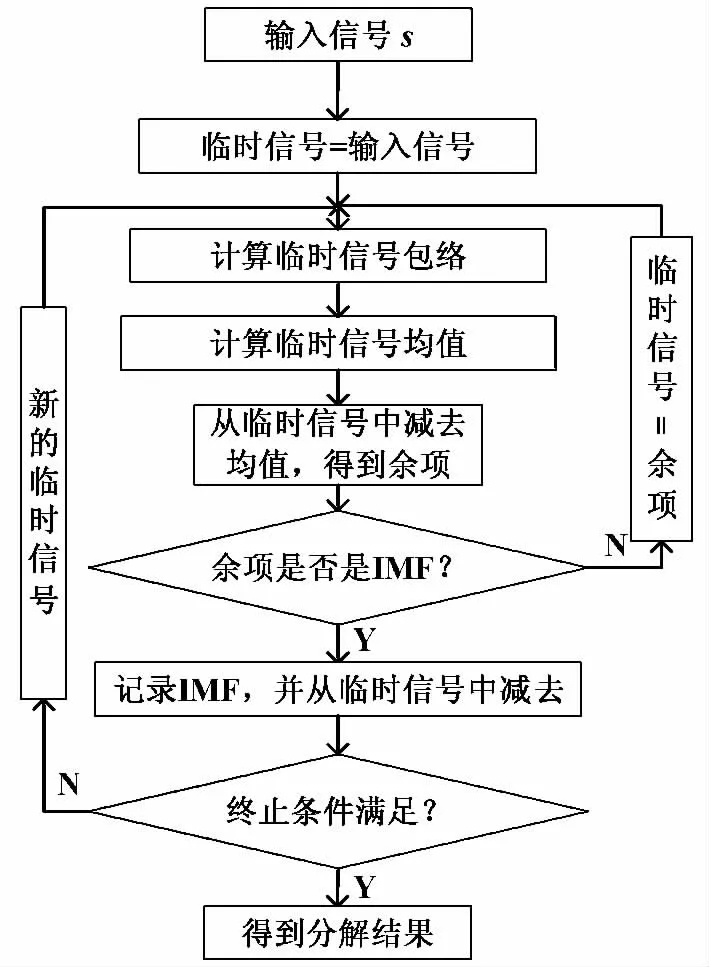
图1 EMD的算法流程
6)令~s=m,并重复步骤2)至步骤6),直到m成为一个IMF.
当得到了一个IMF后,将该IMF从原信号中减去,得到余项q=s-m.将余项q视为新的待分解信号,对其重复进行“筛”过程,便能得到一系列IMF,这就是EMD的分解过程,它包含两个嵌套的循环,内循环生成IMF分量,外循环则生成最终的分解结果.在内循环中,相邻“筛”过程得到的两个结果记为mk-1和mk,对应标准差定义为
式中,T为信号长度.为保证IMF在幅度和频率调制上有足够的物理意义,设定SD在0.2和0.3之间时为内循环终止条件.外循环的终止条件是余项q为一单调函数.最终,可以得到信号s的分解形式为

式中:mi表示第i个IMF;qL为经过L次分解后的余项.
由EMD的分解过程可以看出,EMD每次分解出的IMF信号都是基于上一次分解后的剩余信号,整个分解过程仅涉及信号本身,不需其他额外假设和先验信息,因而EMD分解是自适应的.此外,由于IMF是具有一定带宽的信号,且在同一瞬时点上相邻两个IMF的频率没有重叠,各IMF的频率是递减的,当整个分解过程结束时,就可以得到信号的趋势项.
2 微多普勒信号提取算法
假设仅考虑雷达回波的相位变化,不考虑幅度起伏,则单散射点目标的回波为

式中:t为时间;fc为雷达载频;τ为信号时延.
对回波信号混频,且令τ=2Rt/c,则混频后的回波信号为

式中:Rt为目标相对雷达的斜距;c为光速;λ为雷达发射波波长.
假设散射点目标的整体运动具有加速度和加加速度,且存在运动形式为旋转的微动.则目标相对于雷达的斜距Rt为随时间变化的量为

式中:R0为散射点目标旋转中心距离雷达的初始距离;v为目标速度;a为目标加速度;ξ为目标加加速度;r为散射点旋转半径;ω为旋转角速度;φ为旋转初相.
由式(5)可知,目标的运动带来斜距的变化,斜距的变化带来目标回波中相位的变化,从而引起多普勒频率.
图2给出典型基本运动引起的多普勒频率随时间变化的时频分布图.结合图2进一步分析,式(5)中的第2,3,4项是目标整体运动,引起目标回波中的多普勒调制.其中,第2项是速度引起的多普勒频率,表现为目标多普勒频率的整体偏移,如图2(a)所示;第3项是加速度引起的多普勒频率,表现为目标多普勒频率的线性倾斜,如图2(b)所示;第4项是加加速度引起的多普勒频率,表现为目标多普勒频率的弯曲,如图2(c)所示.式(5)中的第5项是旋转微动引起的距离变化,带来回波中以正弦形式变化的微多普勒频率调制.将以上基本运动复合,可以得到散射点目标的多普勒频率时频分布如图2(d)所示.可见,具有微运动的机动目标引起的多普勒频率调制是复合运动引起的,运动中既包含整体平动分量,也包含微动分量.对于微多普勒信号提取,整体平动引起的多普勒频率调制为干扰项,需对其进行补偿.
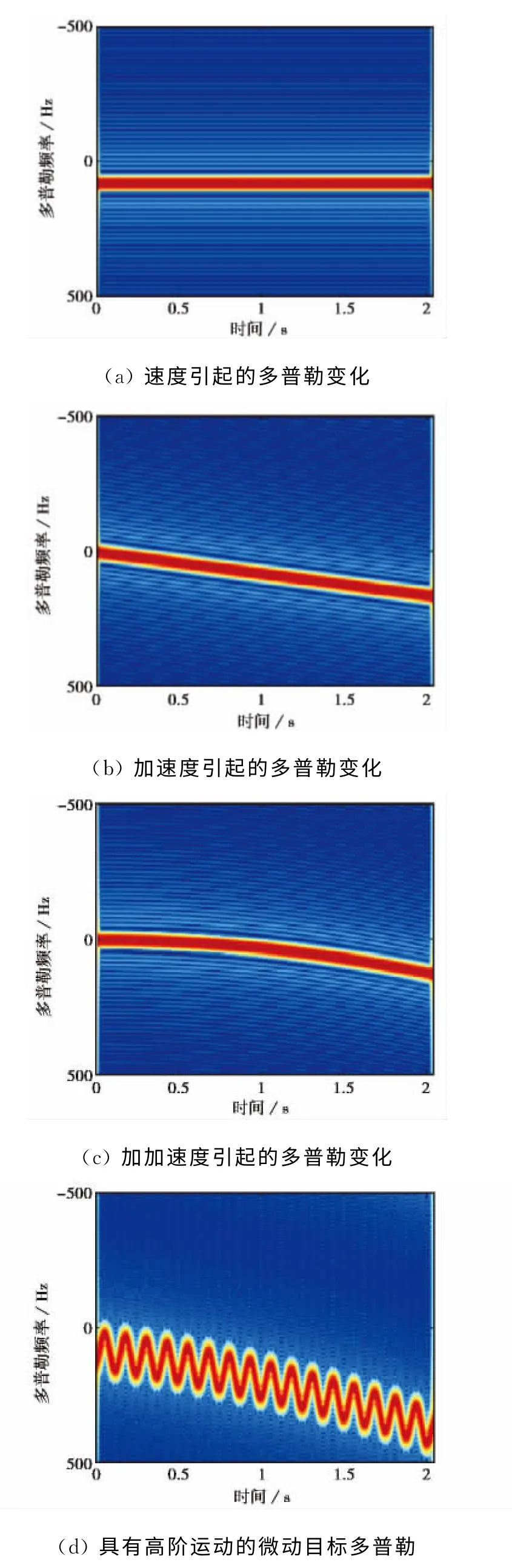
图2 机动目标的基本运动分解
由以上分析可知,微多普勒调制叠加于目标多普勒调制之上,微多普勒调制相对于目标多普勒调制通常是快变量,而多普勒调制则更接近于趋势项.因此,利用EMD的自适应分解特性,有可能将快变的微多普勒信号与慢变的多普勒信号分离,提取出目标的整体多普勒频率变化情况,从而实现对目标整体运动的补偿以及目标回波信号中微多普勒信号的提取.
目标回波信号包含的微多普勒信号提取算法流程如图3所示,包括如下步骤:
1)对雷达回波信号进行短时傅里叶变换(Short-Time Fourier Transform,STFT),得到信号的时频分布;
2)记录每一时刻目标时频分布的峰值位置;
3)根据峰值位置计算目标的瞬时频率值,得到目标的瞬时频率随时间的变化;
4)对目标瞬时频率向量进行EMD分解,得到余项;
5)由余项计算补偿相位值;
6)对雷达回波信号进行相位补偿,消除目标整体运动的影响,得到目标的微多普勒信号.
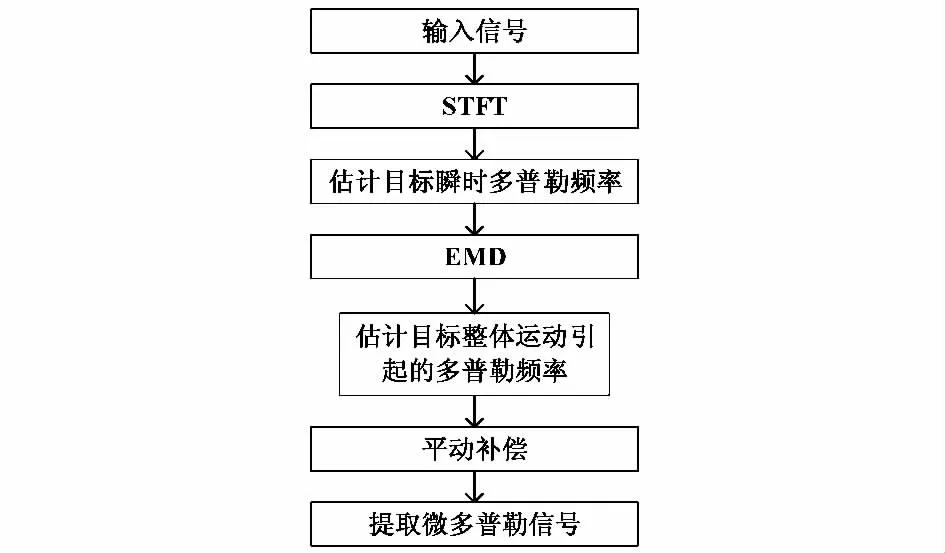
图3 微多普勒提取算法流程
算法的关键在于利用EMD对瞬时频率信号进行趋势项的提取,以及对目标整体平动的补偿.假设目标的瞬时多普勒频率为fd(t),由式(2)可得目标的瞬时多普勒频率分解为

式中,分解结果中的余项fbulk(t)为目标瞬时多普勒频率的趋势项,可以作为目标整体平动的估计.进一步,可以利用该估计值对目标整体平动多普勒进行补偿,从而完成微多普勒信号的提取.
由以上分析可以看出,基于EMD的自适应特性,该算法并不涉及目标的运动模型,也不需要估计目标的运动参数即可实现运动补偿.这在实际应用中是有利的.
3 实验结果
3.1 仿真实验
首先使用仿真实验对提出的算法进行验证.仿真中的参数设置如下:雷达载频为6GHz,脉冲重复频率为1 000Hz,目标初始速度为-7m/s,初始加速度为1m/s2,加加速度为2m/s3,散射点旋转角速度为50rad/s,旋转半径为0.04m.
单散射点机动目标的微多普勒提取结果由图4给出,同时对比了基于Chirp-Fourier变换的补偿方法[9].从图4(a)中可以看出,由于存在加速度及加加速度,目标的多普勒随时间呈曲线变化,微多普勒叠加于多普勒之上.经过对回波瞬时多普勒频率的估计,并利用EMD算法对目标整体运动进行估计的结果如图4(b)所示.图中还给出了目标整体平动多普勒的理论真值.可见,利用文中所提方法,能够较准确地估计出目标的整体平动多普勒频率,从而实现目标整体平动的运动补偿.图4(c)给出经过运动补偿后,提取的目标微多普勒信号的时频分析.可见,利用文中提出的方法较好地补偿了目标的整体平动,微多普勒信号提取达到了较好的效果.图4(d)给出了基于Chirp-Fourier变换的微多普勒信号提取结果.由于目标存在加加速度,即目标运动存在高阶项.而Chirp-Fourier变换方法仅针对目标存在加速度时的运动补偿,因此,尽管Chirp-Fourier变换方法对目标的整体平动有补偿效果,但却无法完全补偿由高阶运动项带来的目标多普勒频率弯曲现象.
3.2 实测数据实验
研究工作还基于实测数据.我们使用雷达测量系统记录了某高速机动目标的雷达回波信号.该次测量中,观测到了较为明显的微动现象.
实测目标的微多普勒信号提取结果如图5所示.从图5(a)中的时频分布可以看出,目标的多普勒频率随时间呈曲线变化,说明目标的运动中包含高阶运动项.利用文中所提方法对目标的整体平动多普勒估计结果如图5(b)所示,可见,目标的整体平动多普勒被较好地估计了出来.利用文中所提方法和Chirp-Fourier变换方法对目标微多普勒信号的提取结果分别如图5(c)和图5(d)所示.可见,Chirp-Fourier变换方法对目标的整体平动仅进行了部分补偿,提取出的微多普勒信号中依然残留有目标的整体平动多普勒.对比而言,文中所提方法取得了较好的运动补偿效果,由目标高阶运动项带来的频率弯曲现象也得到了补偿,从而较好地提取出了目标的微多普勒信号.

图4 单散射点目标微多普勒提取结果
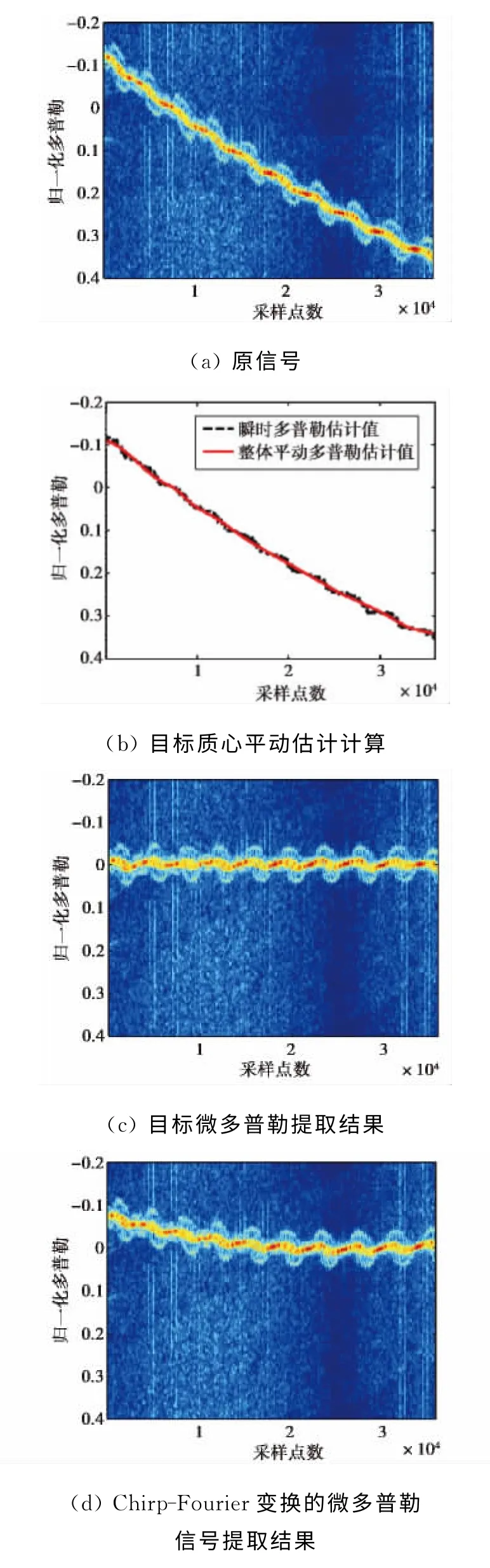
图5 实测目标微多普勒信号提取结果
4 结 论
具有高阶运动的目标,其整体平动引起的多普勒频率随时间呈曲线变化,现有的基于目标加速度的补偿方法并不能取得较好的平动补偿效果.EMD算法具有对信号的自适应滤波特性,将这一自适应分解方法应用于目标整体平动多普勒的估计以及目标整体平动的补偿,可以获得较好的效果,实现目标微多普勒信号的提取.经过仿真实验和实测数据的验证,表明了采用EMD方法进行目标微多普勒信号提取是有效的.
[1]CHEN V C,LI F,HO S S,et al..Micro-Doppler effect in radar:phenomenon,model,and simulation study[J].IEEE Transactions on Aerospace and Electronic System,2006,42(1):2-21.
[2]LUO Y,ZHANG Q,QIU C,et al.Micro-Doppler effect analysis and feature extraction in ISAR imaging with stepped-frequency chirp signals[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(4):2087-2098.
[3]RAM S S,CHRISTIANSON C,KIM Y,et al..Simulation and analysis of human micro-Dopplers in through-wall environments[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(4):2015-2023.
[4]贾守卿,江小敏,夏明耀.基于微多普勒特征的目标分类[J].电波科学学报,2013,28(3):443-447.JIA Shouqing,JIANG Xiaomin,XIA Mingyao.Target classification by micro-Doppler feature[J].Chinese Journal of Radio Science,2013,28(3):443-447.(in Chinese)
[5]李开明,张 群,梁必帅,等.卡车目标遮挡效应建模及微多普勒特征分析[J].电子与信息学报,2013,35(9):2114-2120.LI Kaiming,ZHANG Qun,LIANG Bishuai,et al.Occlusion modeling and micro-Doppler characteristic analysis for truck target[J].Journal of Electronics &Information Technology,2013,35(9):2114-2120.(in Chinese)
[6]杨 俭,侯海平,曲长文,等.机载下视阵列合成孔径雷达成像的微多普勒效应[J].电波科学学报,2012,27(5):1049-1055.YANG Jian,HOU Haiping,QU Changwen,et al.Micro-Doppler effect for airborne downward-looking array SAR imaging[J].Chinese Journal of Radio Science,2012,27(5):1049-1055.(in Chinese)
[7]杨有春,童宁宁,冯存前,等.弹道中段目标回波平动补偿与微多普勒提取[J].中国科学:信息科学,2013,43(9):1172-1182.YANG Youchun,TONG Ningning,FENG Cunqian,et al.Translation compensation and micro-Doppler extraction of the echo from ballistic targets in midcourse[J].Science China Information Sciences,2013,43(9):1172-1182.(in Chinese)
[8]关永胜,左群声,刘宏伟.基于微多普勒特征的空间锥体目标识别[J].电波科学学报,2011,26(2):209-215.GUAN Yongsheng,ZUO Qunsheng,LIU Hongwei.Micro-Doppler signature based cone-shaped target recognition[J].Chinese Journal of Radio Science,2011,26(2):209-215.(in Chinese)
[9]XIA X.Discrete chirp-Fourier transform and its application to chirp rate estimation[J].IEEE Transactions on Signal Processing,2000,48(11):3122-3133.
[10]HUANG N E,SHEN Z,LONG S R,et al.The empirical mode decomposition and the Hilbert spectrum for non-linear and non stationary time series analysis[J].Proceedings of Royal Society,1998,454:903-995.
[11]DELECHELLE E,LEMOINE J,NIANG O.Empirical mode decomposition:an analytical approach for sifting process[J].IEEE Signal Processing Letters,2005,12:764-767.
