双基地多输入多输出雷达距离欺骗干扰识别技术
2015-03-08刘红明何子述胡进峰
段 翔 刘红明,2 李 军 何子述 胡进峰
(1.电子科技大学电子工程学院,四川 成都611731;2.空军试验基地,甘肃 兰州732750)
引 言
双基地多输入多输出(Multiple Input Multiple Output,MIMO)雷达发射阵列子阵发射彼此正交的信号,在空间形成低增益的宽波束,回避了双基地雷达在空间搜索、时空同步等方面的难题,并且在反低空、反隐身以及抗干扰、抗反辐射导弹等方面也有非常独特的优势[1].
与常规雷达一样,双基地MIMO雷达同样面临着干扰的识别对抗问题.距离欺骗是最常见的积极干扰模式之一,由于干扰信号与真实目标信号具有相同的信号形式,因此其可获得和雷达回波相同的压缩处理增益,这使得雷达的目标检测和跟踪系统只能获取错误的距离信息.因此,对距离欺骗干扰的识别对抗方法的研究具有极其重要的意义.
对于距离欺骗干扰的对抗技术,国内外文献给出了很多方法.航天804所的闵庆义[2]简要叙述了雷达抗距离波门拖引干扰的5种技术措施,包括边沿跟踪、距离保护波门、宽波门跟踪、利用搜索雷达距离信息以及人工反拖引等;黎薇萍等针对相位编码信号,利用多波形跳变发射来对抗距离欺骗干扰,但是为了防止干扰方截获跳变顺序,需设计大量信号组,增加了系统负担[3];W.D.Blair等利用检测是否有多个目标量测的信噪比超过预设值的方法来鉴别距离欺骗干扰,但信噪比对这种方法的影响较大且其门限的选取缺乏理论依据[4];X.R.Li在Neyman-Pearson的基础下构造二元假设检验对距离拖引干扰进行鉴别,该方法理论性比较强,但计算量较大[5];Slocumb等根据距离拖引干扰与目标信号仅在径向距离上有差别这一特点构造出一种基于χ2检验的鉴别算法[6],但是由于目标状态的变化,其检测概率也随之变化,再加上可能存在的其他干扰,会导致难以克服的误判问题.
由于双基地MIMO雷达能同时获取目标相对于收发阵列的角度信息[1-8],具备信息盈余的特点,这使得T-R模式的双基地MIMO雷达具备了可与T/R-R双基地雷达相比拟的目标定位精度特性,具备更灵活的抗距离欺骗干扰特性.文章利用双基地MIMO雷达获取的目标相对于收发阵列的角度信息,通过分析目标与收发阵列的空间几何关系构造欺骗干扰判决统计量;然后利用数理统计相关原理,构造合理的判决门限对接收信号进行判决;最后对算法检测概率进行了分析,并进行了仿真验证.
1 信号模型
双基地MIMO雷达示意图如图1所示,发射站发射相互正交的信号,接收端采用同时多波束进行接收.
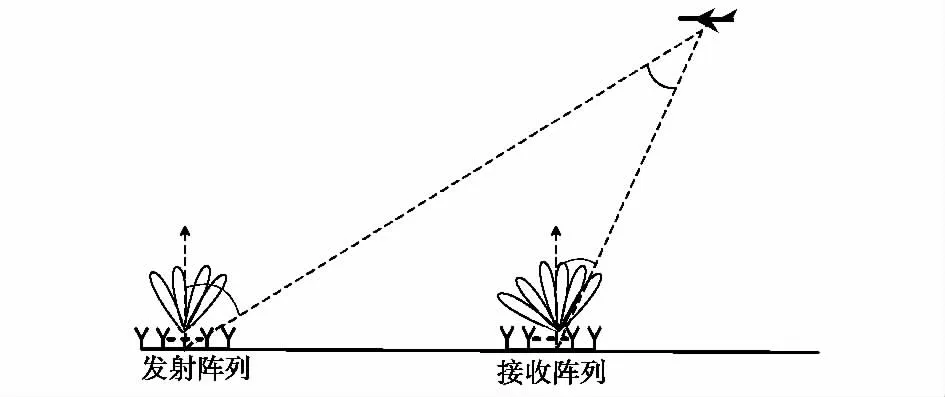
图1 双基地MIMO雷达配置示意图
实际应用中,我们考虑三维空间中面阵的情况,收发阵面坐标系及各参量关系如图2所示.
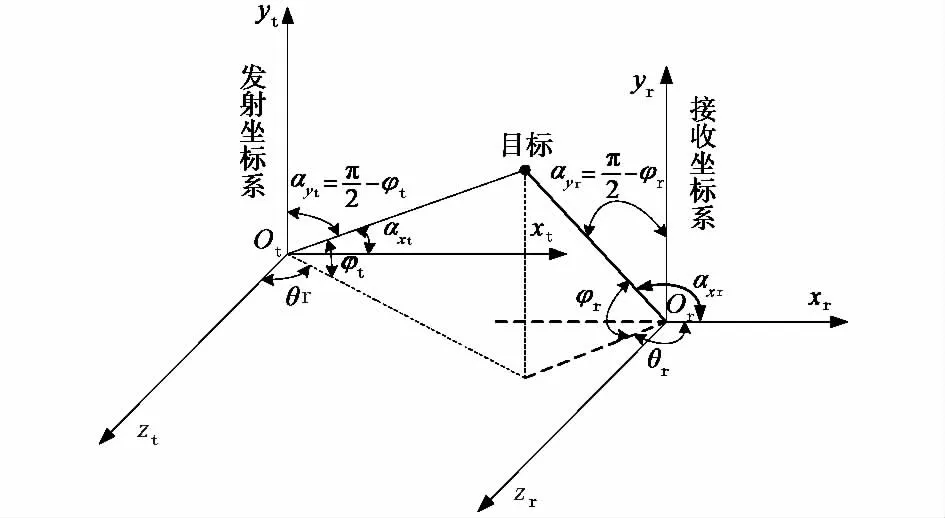
图2 收发阵列坐标系相互关系图
设有M个发射通道,分别发射M个正交信号sk(t),k=1,2,…,M;N个接收通道;空中有一个运动的点源目标,经由目标反射并到达接收单元的信号经下变频后,得到的第n个接收通道接收基带信号为

式中:tr为信号经由目标反射到达参考单元的传输延迟;η为传输损失因子;fd为目标的多谱勒频率;Fm为发射阵列的归一化子阵方向图,假设其为常数Fm=F,m=1,2,…,M(即各子阵波束指向相同);fc为载频;vn(t)为空间和时间白噪声,并设其与信号不相关;Ψr-n,Ψt-m分别是与目标方向对应的收发阵列空间相位差.则整个接收阵列的接收信号可表示为

对于干扰机截获的雷达信号,幅度可以近似为恒定的,则距离欺骗干扰的信号形式可以表示为
理论上说,采用前沿跟踪技术[7]后,常规雷达可以对距离欺骗干扰进行识别并实施有效对抗,然而实际对抗的效果并不理想,主要是目标反射信号随目标运动存在很大的起伏,难以判别出现在波门前沿的究竟是目标信号还是一般的噪声或压缩信号的旁瓣;多基地雷达能有效抗击欺骗干扰,但需要多个接收站配合,采用三角定位的原理实现;常规双基地雷达只能获取目标相对于接收阵列的角度信息和收发阵列至目标的距离和,而很难甚至是无法较为准确地得到发射角度信息,因此也不具备单独对抗距离欺骗的能力,受干扰时目标定位输出数据将出现很大偏差.
2 基于角度定位的双基地MIMO雷达欺骗干扰识别
2.1 算法原理
距离欺骗干扰是基于延迟控制的欺骗干扰.回答式干扰机在雷达脉冲触发下产生一个或几个参数与雷达脉冲相似的信号,这些信号是具有均匀速度的延迟脉冲,模拟了和真目标类似但速度不同的假目标.为确保理想的欺骗效果,欺骗信号的幅度比目标信号的幅度大,同时欺骗信号与目标回波信号必然存在较大的延迟差,否则会更加暴露雷达目标.由于欺骗干扰为目标回波的复制转发,因此其与真实的目标回波具有极大的相似性,这使得接收机无法对两者进行正确的区分,导致目标丢失.
但是,通过距离欺骗干扰的形成机理可以看到,其与目标回波的主要区别是信号延迟不同,而其中包含的目标相对于收发阵列的角度信息是没有变化的.对于真实的目标回波来说,角度信息与距离信息应该是相互对应的;而对于距离欺骗干扰来说,其角度信息与距离信息是无法产生关联的.因此,可以考虑从这一点入手,对欺骗干扰与目标回波进行区别.
对于双基地MIMO雷达来说,除了可以和常规双基雷达一样测量目标相对于收发阵列的距离和以及接收角度外,还可以获得目标相对于发射阵列的角度信息.根据收发站的几何关系可以看出,仅通过收发角度信息便可以实现定位,进而获得目标相对于收发站的距离和,而这个距离和与回波包络的到达时间无关,因此不受距离欺骗干扰的影响.将该距离信息与直接由距离跟踪回路获得的距离和作比较,可判定是否存在距离欺骗干扰.判决准则为

式中:R为通过测量回波延时直接得到的目标距离和;R′为通过收发角度计算出来的目标距离和.
2.2 利用测量角度提取距离和
利用测量得到的发射余弦角αxt,接收余弦角为αxr、αyr可以计算提取目标距离和信息.
我们考虑阵面相对与地面坐标系存在倾角的情况.图3是以发射阵面为例来描述阵面坐标系与地面坐标系的关系(接收阵面类似),图中xyz坐标系为地面坐标系,xtytzt为发射阵面坐标系.相对于地面坐标系,假设发射阵列位置为T(xT,yT,zT),接收阵列位置为R(xR,yR,zR),发射阵列和接收阵列旋转的角度分别为φT,θT和φR,θR,发射余弦角为αxt,接收余弦角为αxr,αyr,以xt为轴,αxt为半顶角的锥面方程为


图3 发射阵面坐标系与地面坐标系位置关系
先将接收波束指向从接收坐标系转到地面坐标系下:设点E为接收波束方向所在直线上的一点,其与接收坐标系原点边线模为1,则E在接收坐标系下的位置为

接收坐标系变到地面坐标需先绕接收坐标系xr轴逆时针旋转θR,再绕y轴逆时针旋转-φR,由坐标变换关系可知E在地面坐标系的坐标为
因为点E与接收坐标系原点连线模为1,故接收波束所在直线在参考坐标系下的参数方程为

将式(8)代入式(5)得

式中:
L为基线长度.
解式(9)得

代入式(8)即得目标坐标.
故求得距离和

式中,

2.3 判决门限求取
实际测量中,必然会引入测距测向误差δR,δαxt,δαxr,δαyr,这些测量误差会对欺骗干扰判决统计量|R′-R|产生影响,这也是距离欺骗干扰判决门限求取的依据.
当所检测信号为真实目标信号时,由角度估计出的目标距离与实测距离的差值RΔ=R′-R0.在一次近似条件下,可得


测距测向误差δR0,δαxt,δαyt,δαzt是相互独立的,则δRΔ的方差为
则判决门限为

式中,ηd为可调整的系数.利用式(12)实现三角定位功能时,其定位精度随目标在空间实际位置的不同会有很大的差异,与此相应,不同位置上的欺骗干扰判决门限也不尽相同.由公式(16)可计算出给定系数ηd和参数估计精度时,不同位置上的欺骗干扰判决门限.
这里可以将RΔ近似为均值为零的高斯分布.由数理统计理论,对于正态分布,在大量同精度观测的一组误差中,偶然误差绝对值大于三倍标准差的理论概率为0.3%,是概率接近于零的小概率事件,或者说这是实际上的不可能事件,故通常取三倍标准差作为偶然误差的极限值,并称为极限误差.因此本文中取ηd=3.
3 识别概率分析
若所检测信号为真实目标回波,判断正确率为

在存在欺骗干扰的情况下,由角度估计出的目标距离与实测距离的差值

ΔR为拖引距离.
此时,判断正确率为

由上一小节的假设,RΔ近似为均值为0,方差为的高斯分布,并假设检测信号为真实目标以及欺骗干扰的概率均为1/2,则总的识别概率为
值得注意的是:由式(20)可以看出,识别概率的影响因素中包括判决门限D,而D随着目标位置的不同而变化,随着目标距离的增大,由测角误差引入的距离估计值R′的误差会增大,从而导致D增大,会使得对欺骗干扰的识别率降低,这与实际情况也是相吻合的.
4 仿真实验
以下仿真首先对判决门限的变化规律和不同空间位置上双基地MIMO雷达抗距离干扰的潜力进行仿真,再对在此方法下目标及干扰识别概率进行仿真验证.
1)欺骗干扰门限变化规律仿真
仿真条件:发射和接收均为16×16(方位×俯仰)的均匀面阵,阵元间间距均为半波长,每个发射子阵所含阵元数为16×1,而每个接收子阵所含阵元数为4×4;雷达发射功率10kW;基线长度30 km;采用正交二相编码信号,子码宽度0.4μs,子码长度1 024;雷达周期为T=1ms,周期数NCPI=1;采样率fs=10MHz;信号载频fc=2GHz;接收端信噪比为-10dB;利用脉冲测距法测距,二相码测距精度为其中c=3×108m/s为电磁波速度,B为信号带宽,SNR为信噪比;测角采用单脉冲比幅测角[11].
数值计算得到的5km高度层侧视区欺骗干扰判别门限变化情况如图4所示.
精密跟踪雷达距离波门覆盖范围一般为300~900m,可以清楚地看到,主要侧视区域里,双基地MIMO雷达具有较好的距离欺骗干扰识别能力,能在目标离开跟踪波门之前识别出距离欺骗的存在,便于及时采取对抗措施.
2)识别概率仿真

图4 欺骗干扰检测门限理论值
仿真条件仍然如上,设置目标参数,控制欺骗干扰的拖引距离,进行2 000次蒙特卡罗仿真.每次仿真目标回波或干扰随机生成,进行欺骗干扰判决,并统计正确检测的概率,即有干扰时判断出有干扰,无干扰时判断为无干扰.设定距离欺骗干扰拖引距离分别为500m和600m,在不同的回波信噪比下,对比识别概率理论值和仿真值,结果如图5所示.
图5 距离欺骗干扰识别概率随信噪比变化的仿真值与理论值对比
由图5可以看出,识别概率理论值比仿真值总体上略高,但差异不大,两者基本吻合.
图6为对接收信号为目标回波、接收信号为干扰和目标回波或干扰随机生成这三种情况分别进行2000次蒙特卡罗仿真.进行欺骗干扰判决,并统计正确检测的概率,通过仿真观察检测概率的大小与信噪比及拖引距离的关系.由图6可以看出:这种判决方式在高信噪比和低信噪比下对目标信号都有较高的识别率,识别概率趋近于1;而由于在低信噪比下测距测角精度较低,因此在低信噪比下对欺骗干扰的识别率较低,但其随着拖引距离的增大以及信噪比的增大呈现递增趋势.
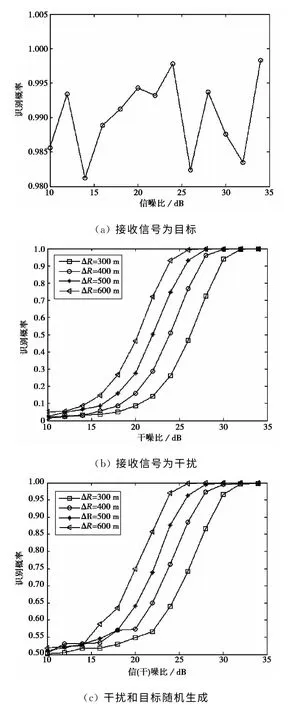
图6 距离欺骗干扰识别概率随信噪比及拖引距离的变化关系
5 结 论
文章针对双基地MIMO雷达欺骗干扰识别对抗问题,提出了一种利用双基MIMO雷达信息盈余的特点进行距离欺骗干扰识别的方法.该算法利用双基MIMO雷达测量得到的收发角度估计目标到收发阵列的距离和与实测得到的距离和的差值作为判决统计量,然后引入数理统计中的极限误差来设置判决门限进行距离欺骗干扰与目标信号的判决识别,并通过理论推导以及仿真验证了本方法的检测概率.本文方法实现原理简单,不会过多增加雷达系统的设计负担,并且能够充分发挥双基地MIMO雷达自身的优势,在一定范围内取得较高的检测概率,具有一定的工程应用价值.
[1]刘红明.双基地MIMO雷达原理与理论研究[D].成都:电子科技大学,2010.LIU Hongming.Analysis on Basic Principles and Theory of Bistatic MIMO Radar[D].Chengdu:University of Electronic Science and Technology of China,2010.(in Chinese)
[2]闵庆义.单脉冲跟踪雷达抗距离拖引干扰的几个方案[J].航天电子对抗,1988(1):20-26.MIN Qingyi.Several schemes for anti-RGPO of monopulse tracking radar[J].Aerospace Electronic Warfare,1988(1):20-26.(in Chinese)
[3]黎薇萍,陶海红,廖桂生,等.抗干扰多波形优化设计技术[J].电波科学学报,2010,25(5):940-946.LI Weiping,TAO Haihong,LIAO Guisheng,et al.Optimization design techniques of multiple waveform for anti-interference[J].Chinese Journal of Radio Science,2010,25(5):940-946.
[4]BLAIR W D,WATSON G A,KIRUBARAJAN T,et al.Benchmark for radar allocation and tracking in ECM[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(4):1097-1114.
[5]LI X R,SLOCUMB B J,WEST P D.Tracking in the presence of range deception ECM and clutter by decomposition and fusion[C]//Proc 1999SPIE Conf Signal and Data Processing of Small Targets,1999,3890:198-211.
[6]SLOCUMB B J,WEST P D.ECM modeling for multitarget tracking and data association[M]//BARSHALOM Y,BLAIR W D.Multitarget-Multisensor Tracking:Application and Advances.Artech House,2000:395-458.
[7]刘红明,何子述,李 军.双基地MIMO雷达发射阵目标角度估计[J].电波科学学报,2010,25(3):499-504.LIU Hongming,HE Zishu,LI Jun.Target angle estimation relation to transmitting array in bistatic MIMO radar[J].Chinese Journal of Radio Science,2010,25(3):499-504.(in Chinese)
[8]刘晓莉,廖桂生.多基线数据融合的双基地MIMO雷达角度估计[J].电波科学学报,2010,25(6):1999-1205.LIU Xiaoli,LIAO Guisheng.Angle estimation based on multibaseline data fusion for bistatic MIMO radar[J].Chinese Journal of Radio Science,2010,25(6):1999-1205.(in Chiese)
[9]CHIN Y H.Radar Tracking System Development[D].Cambridge:Massachusetts Institute of Technology,2005.
[10]林茂庸,柯有安.雷达信号理论[M].北京:国防工业出版社,1984.
[11]张娟娟.大型面阵MIMO雷达子阵级波束形成与角度测量研究[D].成都:电子科技大学,2013.ZHANG Juanjuan.Research on Beamforming and Angle Measurement in Subarray of Large Planar MIMO Radar[D].Chengdu:University of Electronic Science and Technology of China,2013.(in Chinese).
