直驱式永磁风力发电系统低电压穿越的控制策略研究
2015-03-06王陈晨涂娇娇周国威
王陈晨,涂娇娇,周国威
(东北电力大学电气工程学院,吉林吉林132012)
目前,全球正在面临着能源的危机,可再生能源的开发与利用也越来越受到世界各国的重视。在众多类型的可再生能源中,风能由于具有开发容量大、廉价以及清洁等优点,成为当今最有开发前景的绿色能源之一[1]。但是,风能的输出特性受自然条件的影响很大,具有明显的非线性特征,所以,建立永磁发电机组模型,研究风力发电功率的最大跟踪是非常有必要的。文献[1]研究了永磁机在不同风速下的运行特性。文献[2]研究了背靠背PWM换流器的工作原理并给出了网侧换流器的数学模型,但是忽略了机侧换流器的工作模型以及对系统的影响。文献[3-6]介绍了永磁风机的低电压穿越特性,并提出控制桨距角调整输出功率,但对转速超过安全值时的保护未深入考虑。文献[7]在DIgSILENT/PowerFactory中建立了永磁同步发电机和控制系统的仿真模型,对系统的输出特性进行分析。文献[8]研究了不同电压跌落造成的影响,以及一些常见的保护方案。为了弥补这些方法存在的缺陷,本文建立了永磁发电系统换流器和轴系的数学模型,在传统控制的基础上进行改进,实现网侧电压跌落时的低电压穿越,并在PSCAD/EMTDC的仿真环境下,验证了其控制策略的有效性和可行性。
1 直驱式风力发电系统运行特性分析
1.1 风电系统的基本结构
直驱永磁同步发电机组由风力机、永磁机、机侧换流器、直流电容、网侧换流器及控制系统组成[2,9]。风力机和永磁机通过传动系统直接耦合,能提高系统运行的可靠性和降低系统的维护成本。直驱永磁同步发电机通过机侧整流器整流后由直流侧电容进行支撑,再经过网侧的逆变器转换成交流电送入电网。永磁机组的基本结构如图1所示。
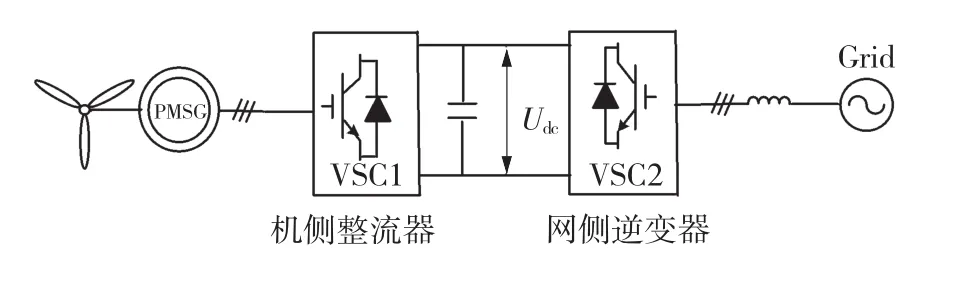
图1 永磁直驱风力发电系统模型Fig.1 Permanent magnet direct-drive wind power system model
1.2 风力机的数学模型
常见的风力发电机是三叶片、水平轴式的风力机,当风作用在风轮上时,风轮只能吸收风能的一部分。根据贝茨的极限理论可以得出风能最大利用系数的理论值为0.593,而实际被风力机吸收的风能被称为风力机的机械功率,其表达式为[9]

风力机的机械转矩表达式为

式中:ρ为空气密度,kg/m3;R为风叶的半径,m;β为桨距角,(°);λ为叶尖速比;Vw为风速,m/s;wm为风机的转速,rad/s;CP为风能系数,其表达式为[9]

由式(1)拟合出Cp与λ的特性曲线,如图2所示。

图2 风能利用系数曲线Fig.2 Wind energy utilization coefficient curve
1)当风机处于低风速下运行时(即Vin(切入风速)<Vw<V额定(额定风速)),通过转速控制系统对发电机调速,保持风机能够工作在最佳叶尖速比的状态,此时桨距角控制为一恒定值,风能获得最大程度的利用。
2)当风机处于高风速下运行时(即V额定(额定风速)<Vw<Vcut(切出风速)),通过调节桨距角降低风力机对风能的捕获量,释放部分风能,使风力机输出的转速和功率维持在额定值,确保机组高效运行。
2 发电系统的控制策略
2.1 发电机侧变流器的控制策略
发电机侧定子遵循发电机的惯例,取同步旋转参考坐标系的d轴方向为定子电压矢量的方向,q轴超前d轴90°,通过坐标变换之后得到dq坐标系下的电机定子电压方程和机械运动方程[8]为
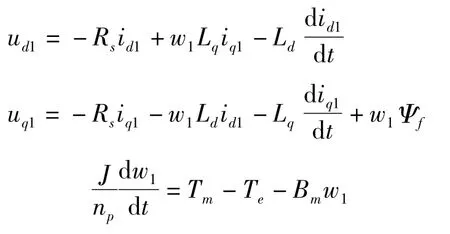
式中:ud1,uq1和id1,iq1为定子侧的电压和电流在dq轴上的分量;Rs为定子的电阻;Ld和Lq为定子在dq轴的电感;Ψf为永磁体的励磁磁链;w1为转子的角速度;np为永磁发电机的极对数;J为转动惯量;Bm为转动粘滞系数;Tm为输入永磁机的机械转矩;Te为永磁机输出的电磁转矩,其表达式为

由于永磁发电机的转子为对称结构,则有Ld=Lq,对式(2)简化后得

发电机侧整流器控制框图如图3所示。
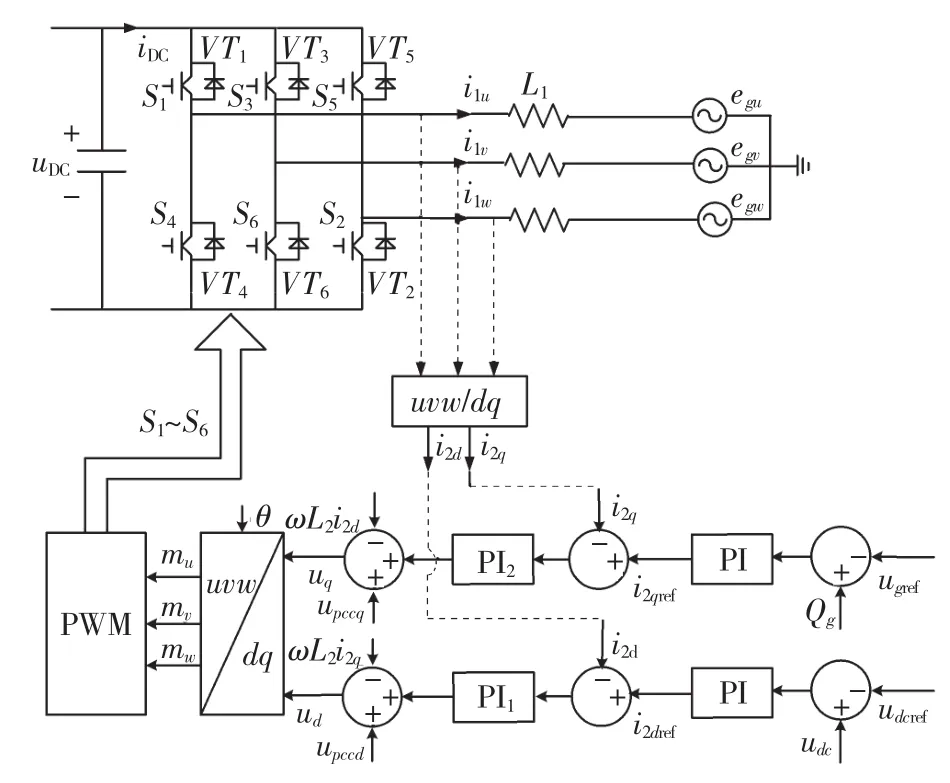
图3 发电机侧变流器控制框图Fig.3 Generator side converter control block diagram
内环采用电流控制,外环采用功率控制,分两种运行方式控制。当正常运行时,根据当前的风力机转速和桨距角,通过MPPT模块计算出发电机发出的有功功率参考值,与电机实际发出的功率比较,然后将其差值送入PI调节器,输出转子有功电流的参考值Pref。当网侧出现电压跌落时,有功功率参考值Pref1由Pref和电网侧实际电压值共同决定,其表达式为

d轴控制永磁发电机的运行状态,为了使永磁机达到最佳运行状态,直接使参考电流=0,通过前馈补偿方法进行dq轴的解耦,使d轴和q轴的控制可以独立的进行。
2.2 电网侧变流器的控制策略
网侧变流器采用电压矢量定向原理,取d轴与电网A相电压矢量重合,q轴超前d轴90°,dq坐标系随电网电压向量同步旋转,则在同步旋转坐标系下的网侧变流器数学模型为[8]
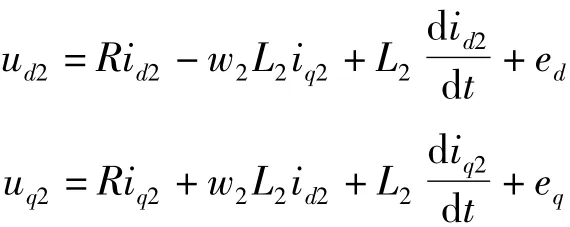
式中:ud2,uq2和id2,iq2为网侧换流器输出的交流电压和电流在dq轴上的分量;ed,eq为电网侧电压在dq轴上的分量;L2,R为网侧换流器和电网之间的电感和电阻;w2为电网的角频率。
网侧整流器控制框图如图4所示。网侧变流器和发电机侧变流器虽然结构相同,但是它们的数学模型是建立在不同的同步旋转坐标系下的。发电机侧变流器和永磁同步发电机直接相连,所以其数学模型建立在发电机转子同步旋转坐标系下,网侧变流器与电网相连,其数学模型建立在电网电压坐标系下。在两相同步旋转的dq坐标系中,使d轴与电网电压矢量重合,即ed=us(us为电网电压的有效值),q轴超前d轴90°,则eq=0。内环采用电流控制,通过前馈补偿的方式来消除耦合项,外环采用定直流电压和定无功功率控制。

图4 电网侧变流器控制框图Fig.4 Electric grid side converter control block diagram
2.3 桨距角控制的最大功率捕获
当发电机的转速低于额定转速时,桨距角将保持不变;当风速高于额定风速时,发电机的转速就会上升;当发电机的转速高于额定转速时,将实际转速和额定转速进行比较作差,经过PI控制器得到桨距角的控制信号和风机叶片的实际桨距角,将实际桨距角反馈到风力机叶轮,实现桨距角的最佳控制。桨距角控制如图5所示。

图5 桨距角控制框图Fig.5 Pitch control block diagram
3 低电压穿越的控制策略
当电网正常运行时,忽略换流器的损耗,可近似认为风机注入电网的功率Pg等于电网输送的功率。网侧出现故障时,电网电压瞬间跌落,导致Ps瞬间减小,使风机发出的功率无法全部送出,换流器两侧功率不匹配,此时产生一个P。这部分未能输出的电能将给直流电容充电,直接导致直流母线电压Udc快速上升,引起流过母线电容及流入网侧变流器的电流快速增大。如果不采取有效措施,过高的电压及电流将超出直流母线电容和变流器功率器件的额定容量,导致其损坏,甚至会引起系统崩溃。
当网侧电压跌落时,引入网侧电压的信号对机侧的有功参考功率重新计算,减少有功参考值的输出,保证机侧输入功率与网侧输出功率达到动态平衡。但机械功率不能瞬间突变,此时发电机的机械转速上升,若机械转速不超过额定转速,则实现低电压穿越。当转速超过额定转速w0时,投入桨距角控制系统,减少风能捕获以实现降低转速w的目的。但由于桨距角控制实现缓慢,当发电机转速超过最大转速时,应切除桨距角控制系统,投入卸荷电阻,消耗不平衡有功。若将减出力和卸荷电阻协调控制,则能够更好地实现低电压穿越。低电压穿越控制流程如图6所示。
通过对比直流电容的实际电压Udc和直流电压的参考值Udcref的大小,当直流电压的实际值超过额定值的1.2 p.u.时,给出卸荷电阻的触发信号。卸荷电阻控制框图如图7所示。
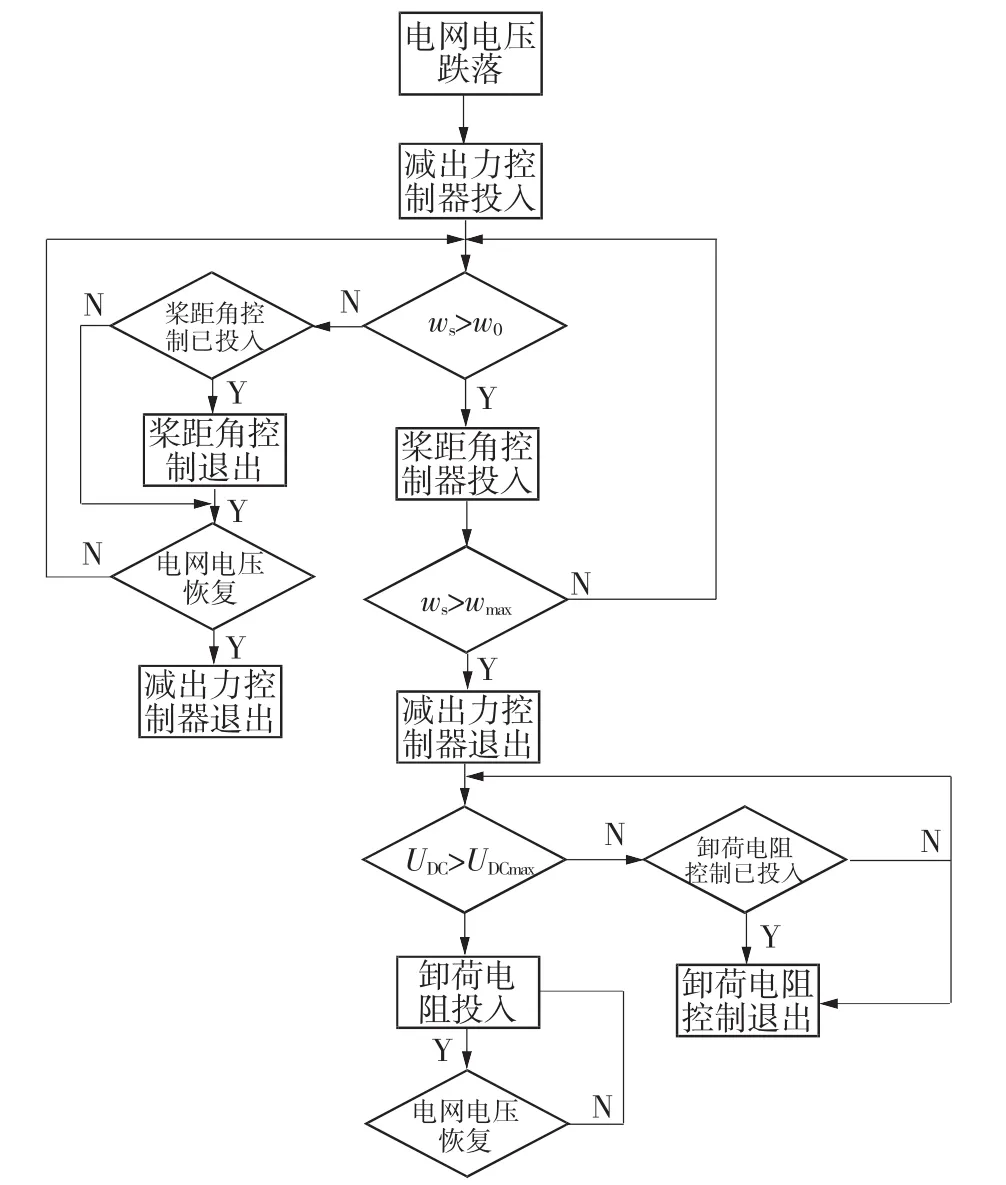
图6 低电压穿越的控制流程图Fig.6 Flow diagram of control for low voltage ride through
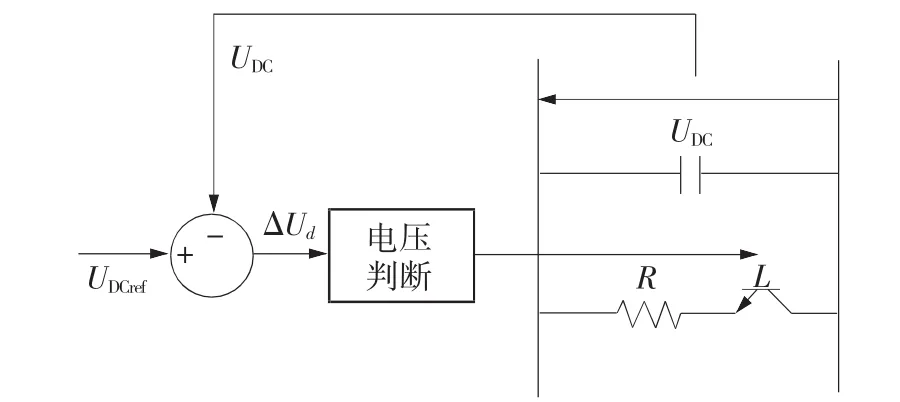
图7 卸荷电阻控制框图Fig.7 Unloading resistance control block diagram
4 系统仿真
运用仿真软件PSCAD/EMTDC建立了1.5MW直驱永磁同步风电机组的仿真模型与运行控制系统,系统主要参数如表1所示。
在仿真软件PSCAD/EMTDC中搭建的仿真模型如图8所示。正常运行时,风机运行在额定风速下,功率因数为1,电网侧出口电压稳定在0.69 kV。为了实现低电压穿越,确保风机在电压跌落故障时正常运行,在两种电压跌落的情况下,分析了仿真模型。
仿真算例1:当风速保持12 m/s不变时,电网侧在t=1 s时发生三相对称电压跌落故障,如图9a所示,故障持续时间为0.625 s,跌落深度为20%。仿真图形如图9所示。
可看出并网点电压发生跌落故障后,由于机械功率不能突变(如图9c所示),电机转速上升,当超过额定转速时投入桨距角控制系统,释放部分风能。转子转速未超过安全转速,电容电压稳定在1.2 kV,实现低电压的穿越。
仿真算例2:当风速为12 m/s时,在t=1 s的时刻,电网发生三相对称电压跌落故障,跌落深度为50%,故障持续时间为0.625 s,如图10a所示。
桨距角释放风能响应较为缓慢,在电网电压深度跌落时无法及时释放风能,故采用卸荷电阻与减出力协调控制方案,实现低电压的穿越。
在t=1 s时,发生三相对称电压跌落故障(如图10b、c所示),输入电网的有功功率P2减少至0.75 MW,发电机减功率控制器根据电网电压跌落深度减少发电机发出有功功率至0.75 MW。当t=1.4 s时,由图10c、d可观察出转速超过安全转速1.1 p.u.时,机侧的减出力控制器退出,卸荷电阻投入,消耗不平衡有功,在减少有功控制和投入卸荷电阻协调控制的条件下,实现低电压穿越。

表1 仿真模型参数Tab.1 Simulation model parameters
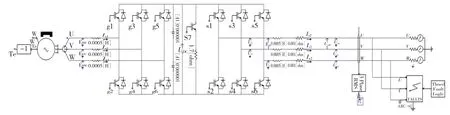
图8 仿真电路图Fig.8 Simulation circuit
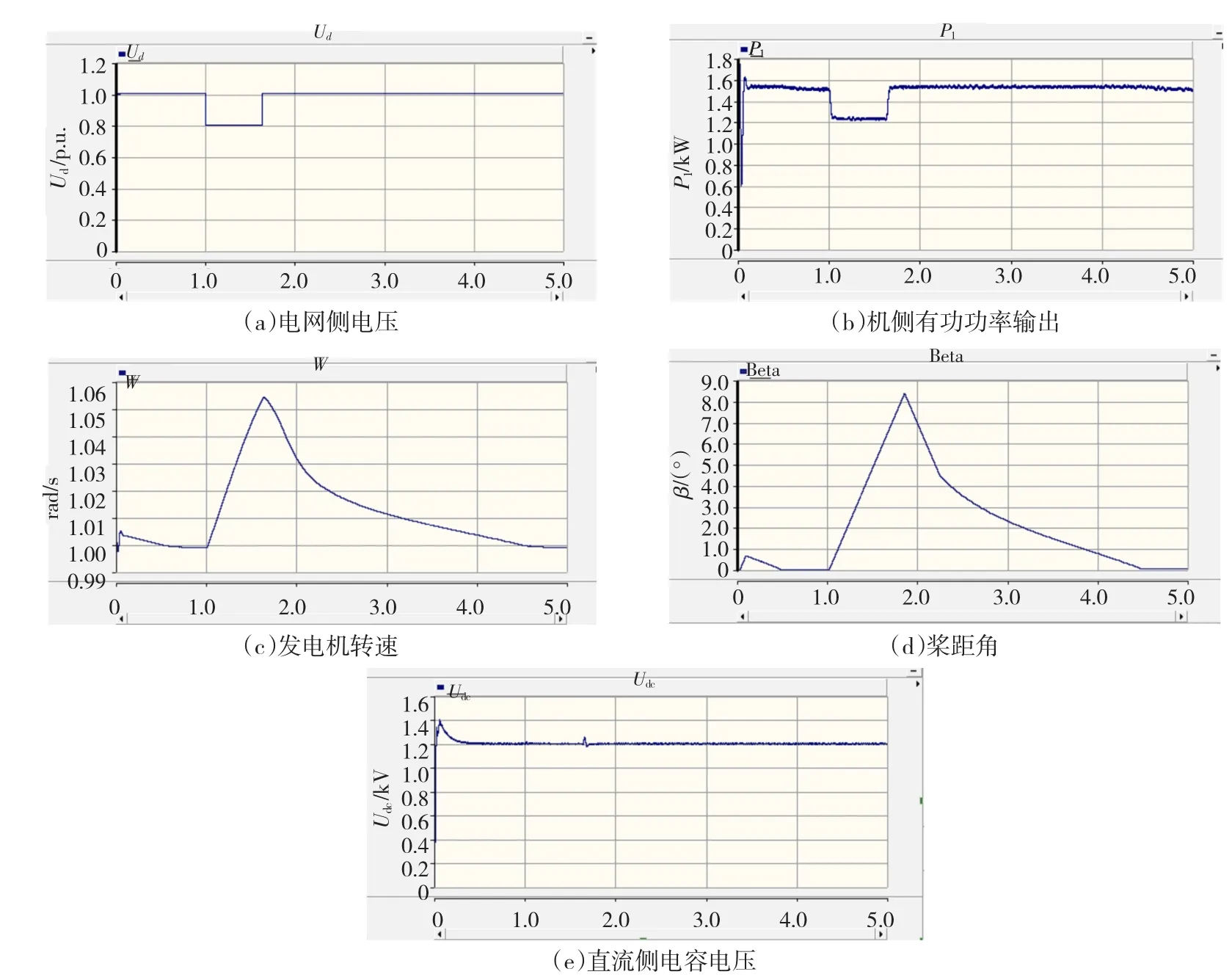
图9 电压跌落20%系统各变量波形Fig.9 Voltage sag 20%system variables waveform

图10 电压跌落50%系统各变量波形Fig.10 Voltage sag 50%system variables waveform
5 结语
在低电压穿越的控制中,将机侧传统的控制方法进行改进,采用减少机侧有功功率输出和卸荷电阻的协调控制方法,可使该系统在不同电压跌落的情况下实现低电压穿越,并具有很好的实用性。
[1] 陈虎,钱春震,马建光,等.永磁直驱风力发电系统最大功率追踪策略研究[J].电力系统保护与控制,2012,40(22):83 -87.CHEN Hu,QIAN Chunzhen,MA Jianguang,et al.Study on maximum power point tracking strategy for direct-driven permanent magnet synchronous generating system[J].Power System Protection and Control,2012,40(22):83 -87.
[2] 姚骏,廖勇,庄凯.永磁直驱风电机组的双PWM变换器协调控制策略[J].电力系统自动化,2009,32(20):88 -92.YAO Jun,LIAO Yong,ZHUANG Kai.Coordinated control strategy of back-to-back PWM convertor for D-PMSG wind turbines[J].Automation of Electric Power System,2009,32(20):88-92.
[3] 杨晓萍,段先锋,田录林.直驱永磁同步风电系统低电压穿越的研究[J].西北农林科技大学学报:自然科学版,2009(8):228-234.YANG Xiaoping,DUAN Xianfeng,TIAN Lulin.Research on low voltage ride through of D -PMSG system[J].Journal of Northwest A&F University:Natural science edition,2009(8):228-234.
[4] 李建林,胡书举,孔德国,等.全功率变流器永磁直驱风电系统低电压穿越特性研究[J].电力系统自动化,2008,32(19):92-95.LI Jianlin,HU Shuju,KONG Deguo,et al.Study on the low voltage ride through capabiligy of fully converted wind turbine with PMSG[J].Automation of Electric Power System,2008,32(19):92-95.
[5] NG C,RAN L,BUMBY J.Unbalanced grid fault ride-through control for a wind turbine inverter[C]//Industry Applications Conference,2007.42nd IAS Annual Meeting.Conference Record of the 2007 IEEE.IEEE,2007:154-164.
[6] 尹明,李庚银,张建成,等.直驱式永磁同步风力发电机组建模及其控制策略[J].电网技术,2007,31(15):61 -65.YIN Ming,LI Gengyin,ZHANG Jiancheng,et al.Modeling and control strategy of D -PMSG wind turbine[J].Power System Technology,2007,31(15):61 -65.
[7] 张梅,何国庆,赵海翔,等.直驱式永磁同步风力发电机组的建模与仿真[J].中国电力,2008,41(6):79 -84.ZHANG Mei,HE Guoqing,ZHAO Haixiang,et al.Modeling and dynamic simulation of a D - PMSG based wind turbine unit[J].Electric Power,2008,41(6):79 -84.
[8] Xiao-ping Y,Xian-feng D,Fan F,et al.Low voltage ridethrough of directly driven wind turbine with permanent magnet synchronous generator[C]//Power and Energy Engineering Conference,2009.APPEEC 2009.Asia-Pacific.IEEE,2009:1-5.
[9] 严干贵,魏治成,穆钢,等.直驱永磁同步风电机组的动态建模与运行控制[J].电力系统及其自动化学报,2009,21(6):34-39.YAN Gangui,WEI Zhicheng,MU Gang,et al.Dynamic modeling and control of D -PMSG wind turbine[J].Proceedings of the CSU -EPSA,2009,21(6):34-39.
