基于CAN总线的微网控制方法研究
2015-03-05罗泽林
罗泽林
(成都农业科技职业学院,四川成都611130)
风能、太阳能、燃料电池、生物质能等发电方式成为了不可持续性能源的有益的补充。为了加快可持续性能源的开发和利用,分布式电源(DG)是有效推动其发展的主要方式。将分布式电源系统以微网的形式接入大电网,一方面可以减轻大电网供电的压力,为各种绿色能源提供良好的利用途径;另一方面也可以使局部的用电不受大电网结构复杂,故障率高的影响,提高局部范围用电的可靠性。
微网具有独立性高、灵活性强、交互性完善的基本特性,是一种系统、高效的管理分布式电源,提升能源利用效率,提高供电可靠性,改善电能质量的重要方式[1]。微网的主要工作方式有两种,一种是孤岛工作方式,另一种是并网工作方式,两种工作方式相辅相成,为局部负载提供安全性好、可靠性高的供电方式。但是,分布式电源供电形式的多样化在微网与大电网并联运行时会给电力系统带来可靠性、稳定性和实时调度等方面的问题,而且,微网本身多种形式的电源之间的功率协调与平衡等问题也会给微网的运行带来不小的隐患。
为了提高微网供电的可靠性,采取合理的措施对微网的能量进行有效的管理,是实现电网功率平衡和接入友好的前提条件。
1 微网结构分析
如图1所式,微网主要由分布式电源、负载、控制单元及保护继电器等单元组成。其分布式电源一般由微型燃气轮机、燃料电池、风机、光伏电池等形式组成,由于风能与太阳能等绿色能源都具有波动性与间歇性的基本特性,因此设置储能环节来保证电能供给的可靠性和均衡性。
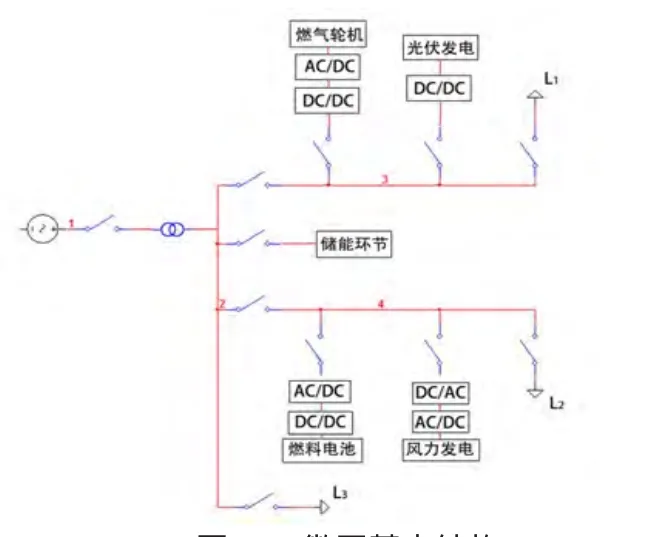
图1 微网基本结构
本设计中的储能单元采用超级电容组和蓄电池并联的复合储能方式。该复合电池利用了超级电容功率密度高、充放电时间短、循环寿命长、工作温度范围宽的优点,也结合了蓄电池恒流性能好的特征,可以有效地向不同类型的负载提供可靠、优质的电能。
微网的控制单元是微网在孤岛与并网两种工作模式间进行切换的重要模块,主要功能是对微网内部的电力设备及负载设备提供安全保护;对复合电池组的运行状况进行监控;对太阳能发电系统及风能发电系统进行最大功率点跟踪参数设定;对继电器的动作进行控制等。
微网控制单元与其它设备之间的通信采用CAN总线来完成。
2 微网能量管理功能分析
微网能量管理系统是以嵌入式系统为基础,以现场采集的分布式电源及其他设备的实时运行数据为依据,对微电网的运行过程进行有效的管理和调度,保障电力系统稳定运行的核心系统。
微网能量管理系统的功能有:
(1)实时采集分布式电源、储能环节、大电网运行状态、负载运行等信息,并对信息进行初步处理;
(2)发电预测、自动发电控制、负荷预测功能;
(3)实现大电网、各分布式电源系统、储能环节与负载之间的功率匹配;
(4)实现监测状态下微网运行状态的无缝切换。
本设计所完成的微电网能量管理系统的硬件层以ATmegal6为主控芯片,以CAN控制总线为主要的通信方式,在距离较远的负载端利用GRPS模块实现远程信号输入,基本结构如图2所示。
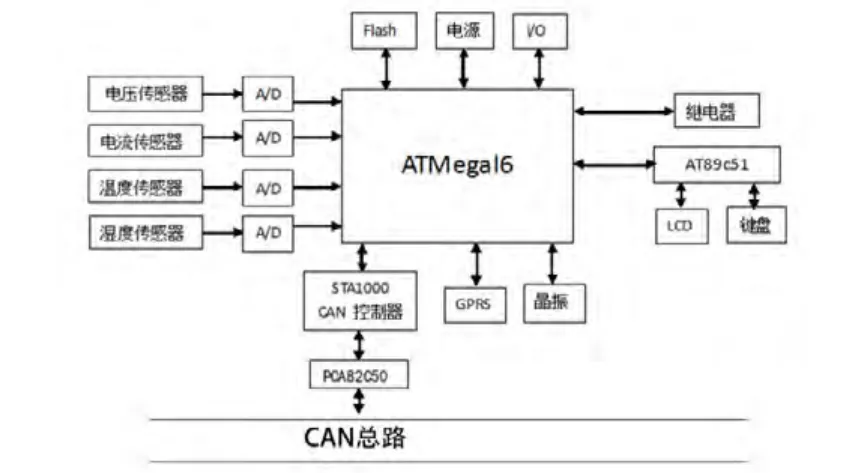
图2 硬件层基本结构
在本设计中,底层的通信方式利用了CAN总线结构,利用SJA1000控制器与主控芯片相连,接受来自于主控芯片的控制命令,并将该命令通过PCA82C250CAN收发器发送至总线中,以实现对设备的控制。
CAN采用符合ISO/OSI网络标准模型的3层结构模型:物理层、数据链路层与应用层。采用双绞线,通信速率最高可达到1 Mbps/40m,直接传输距离最远可达10 km/5 kbps[2]。CAN以全网广播为基础,各接收站根据报文中相关的标识符过滤报文,从而实现报文的实时接收。CAN采用带优先级的CSMA/CD协议对总线上的数据冲突进行仲裁,因此可以允许多个数据监测点同时发送数据,有效地保证了数据处理的实时性。同时如图3所示,CAN采用短帧结构,每帧信息都有CRC检验和其他纠错措施,保证了数据传输的误码率。

图3 CAN帧格式
3 微网控制策略分析
微网的运行分为两种形式,一种是孤岛状态,就是切断与大电网的联系,自成一个运行体系,体系内负载完全由各分布式电源提供能源;一种是并网状态,微电网作为大电网的一部分,利用逆变器与大电网相连接,或利用大电网供能,或自身能源输送至大电网中,实现并网发电。
当微网处于并网状态时,其内部功率不足的部分由大电网供给,而频率的控制和电压的调整也相应的由大电网来支配,这就要求微网中各分布式电源的有功功率和无功功率在一定的范围内进行工作,因此各逆变器接受来自于ATmegal6芯片所指定的有功功率和无功功率的值,本设计使用PQ方法来实现控制,具体控制方式如图4所示。
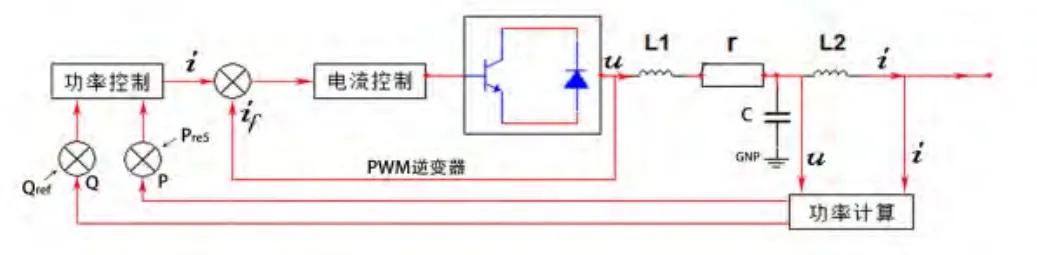
图4 PQ控制结构
当微网处于孤岛运行状态时,各分布式电源需通过逆变器进行有功功率、无功功率、电压、频率的调整,因此控制策略采用基于下垂特性的P-f和Q-V方式,具体控制方式如图5所示。
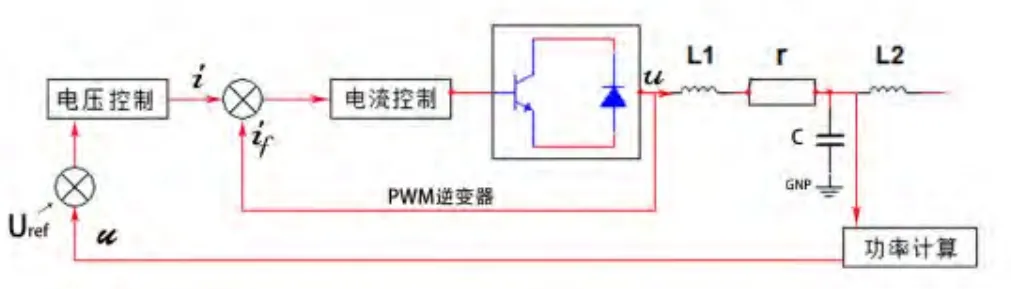
图5 电压和频率控制框图
4 总结
本文在分析微网结构的基础上,设计了微网能量管理系统,并详述了管理系统的硬件组成及CAN通信方式。
为了提高微网运行的稳定性和可靠性,微网采用了PQ控制与下垂控制相结合的方式,利用PQ控制来实现孤岛运行的平稳性,下垂控制来提高并网运行时的平滑度。
[1] 张永健.电网监控与调度自动化[M].北京:中国电力出版社,2011:3-5.
[2] 屈军锁.物联网通信技术[M].北京:中国铁道出版社,2011:124-125.
