模型参考自适应控制在失重计量技术上的应用研究
2015-03-05北京工商大学材料与机械工程学院汤晓华
北京工商大学材料与机械工程学院 苏 登 汤晓华
模型参考自适应控制在失重计量技术上的应用研究
北京工商大学材料与机械工程学院 苏 登 汤晓华
【摘要】失重计量技术是通过检测称重仓内物料重量在单位时间内的减少量控制螺旋送料器转速,以实现精确给料的目的。这种计量方法理论上可以达到较高精度,但是当物料参数发生变化或者失重秤运行过程中受到外界环境的干扰时不能进行实时自适应控制,会造成配料组分精度下降,最终影响产品的性能指标和产品质量。本文研究将模型参考自适应控制理论应用到失重计量技术上,开发失重称重机电系统,实现失重称重计量。
【关键词】失重计量;模型参考自适应控制;应用研究
前言
自适应控制是在人们要求越来越高的控制性能和针对被控系统的高度复杂化、高度不确定性的情况下产生的,是人工智能渗入到应用科技领域的必然结果,自适应控制理论的产生为解决复杂系统控制问题开辟了新途径,成为当下控制领域的研究和发展热点[1]。自适应控制中的模型参考自适应控制本质上是按照反馈控制原理设计的,在参考模型始终具有期望的闭环性能的前提下,使系统在运行过程中,力求保持被控过程的响应特性与参考模型的动态性能一致。当广义误差向量e不为0时,自适应机构按照一定规律改变可调机构的结构或参数或直接改变被控对象的输入信号,以使得系统的性能指标达到或接近希望的性能指标。
本文主要研究的是将自适应控制中的模型参考自适应控制方法应用到失重计量技术上,实时在线控制失重称重精度,可以有效地减少现有失重计量技术由于对物料参数变化及外界干扰的自适应能力不强而造成的误差,能够很好地消除结构扰动引起的系统误差且保证系统具有全局渐进稳定性。
1 模型参考自适应控制
模型参考自适应控制是应用最广泛的一种自适应控制技术,它的显著特点是原理简单,而且设计方法非常丰富,模型参考自适应控制本质上是按照反馈控制原理设计的,它的基本结构如图1所示。
模型参考自适应系统主路由控制器和被控对象组成,尽管图中的控制器和被控对象看上去只是串联关系,但是事实上可以有各种连接和补偿。与主路并联的是参考模型,参考模型是根据控制目的设计的理想系统,通常假定参考模型的输出完全达到设计目标。在控制器和被控对象都处于正常状态的时候,主路上控制器和被控对象的组合其输出也应该是理想的,这时偏差e=0。然而当各种各样的原因使得控制器与被控对象产生了变化,偏离了原先的设计,造成e≠0,偏差信号输入自适应结构,自适应结构按照预先制定的→规则产生调节方案,改变控制器的参数或者结构,使得被控对象的输出yp逼近参考模型的输出ym,也即e→0[2]。

图1 模型参考自适应系统框图Fig1. MRAC system diagram
2 失重计量技术简介
2.1 失重计量原理
失重计量系统是将给料螺旋、搅拌器和称重仓安装在一起,该总体放置在称重传感器上,组成一个单独的秤,通过柔性连接,该称与其他设备分离,通过称重传感器检测称重仓内物料重量在单位时间内的减少量控制螺旋送料器转速,以实现精确给料的目的。

图2 失重计量系统图Fig2. weightlessness measurement system diagram
失重计量给料系统,是根据称重传感器检测单位时间内称重仓内重量的减少量,连续计算出投料量的多少,并根据投料量大小与投料量的设定值的比较结果,控制器通过模拟电压输出给变频器来控制三相交流电机调整给料螺旋的转速,从而使投料量与其设定值相符,随着给料的连续进行,称重仓物料重量不断减少,直到称重仓内物料重量达到给定下限值时,称重仓进料阀门打开,开始向计量仓内进料,直到计量仓内物料重量达到给定上限值后,进料阀门关闭,重新开始测量和控制[3]。
称重仓在进料期间无法进行投料量大小的测量,这时只能锁定给料螺旋的转速(即进料圆顶阀打开前最后的转速)保持投料量不变,因此进料时间不能够太长,否则将导致投料量偏差大而影响失重称重精度,故一般要求补料过程与失重计量过程时间之比不大于1:10。
2.2 失重计量技术的应用
在塑料行业多组分配料过程中,原料配料比决定产品成分,因此该环节是生产的关键工序之一,其配料精度直接影响到产品的质量、能耗、成本等各项技术经济指标[4],而失重计量系统可以精确快速的进行多组分配料,大大提高了原有人工操作的生产效率,经济效益明显提升。
3 研究方案
3.1 被控对象特性分析
在设计一个控制系统之前,首先要对被控对象的特性加以分析,如图3所示为失重秤传动系统图,根据此传动链结构建立相应的数学模型,即建立以伺服电动机的转角为输入量、螺旋送料器的转角为输出量时该失重秤传动链的传递函数,初步推算传递函数为包括的二阶系统(分别为螺旋送料器及各轴折算到电机轴上的等效总转动惯量、等效总粘性阻尼系数和等效总刚度系数)[5]。
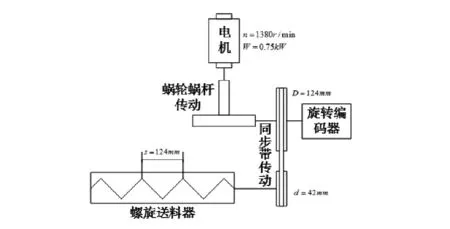
图3 失重秤传动系统图Fig3. Loss-in-weight driving system diagram
3.2 确定控制器初始参数
根据上述计算出的二阶系统的传递函数,初步确定前馈调节器和反馈调节器的初始参数。
3.3 建立参考模型
参考模型代表系统希望的输出响应,是根据控制目的设计的理想系统,通常假定参考模型的输出完全达到设计目标。在设计中,参考模型必须是稳定的,并且是完全可控和完全可观测的。本文中按照失重计量的数学模型建立理想的参考模型,参考模型的输出应该是失重秤在当前设定流量下的理想输出,如图3所示。

图4 模型参考自适应控制系统Fig4.MRAC system
3.4 设计自适应算法
模型参考自适应控制的关键问题是如何选择自适应机构的自适应算法,以确保系统有足够的稳定性,且可调系统与参考模型的特性相一致,即使得广义误差趋于最小。自适应机构比较参考模型输出和实际输出两者之差,确定自适应规律,然后改变调节器参数,使实际输出尽量逼近理想输出。当前设计自适应机构、确定自适应律的方法主要采用局部参数最优化方法(MIT方法),MIT方法理论简单、实施方便、可用模拟元件实现,实质是一个可调增益的系统,可以很好的满足课题要求[6]。
4 结论
综上所述,将自适应控制中的模型参考自适应控制方法应用到失重称重技术上,实时在线控制失重称重精度,可以有效地降低现有失重称重技术由于对物料参数变化及外界干扰的自适应能力不强而造成的误差,能够很好地消除结构扰动引起的系统误差且保证系统具有全局渐进稳定性。
参考文献
[1]韩正之,陈彭年,等.自适应控制[M].清华大学出版社, 2011,04.
[2]吴忠强,朴春俊.模型参考自适应控制理论发展综述[J].信息技术,2007,07.
[3]梁海军.失重秤在工业生产中的应用[J].科技传播,2011,07.
[4]王金林.失重秤应用实例分析[J].科技应用,2010,03.
[5]王福忠,高彩霞,等.基于模糊控制的失重秤配料过程控制策略[J].河南理工大学学报(自然科学版),2008,06.
[6]梁春燕,钟庆昌,等.基于模型参考的自适应PID控制器[J].上海交通大学学报,2000,05.
苏登(1991-),男,湖北孝感人,硕士研究生,主要从事机电一体化方面的研究。
作者简介:
课题来源:北京工商大学2015年研究生科研能力提升计划项目资助。