基于大学生方程式赛车整车控制器的开发
2015-03-05合肥工业大学机械与汽车工程学院吴其林张爱武黄啸林李遵义
合肥工业大学机械与汽车工程学院 张 奎 吴其林 张爱武 黄啸林 李遵义
基于大学生方程式赛车整车控制器的开发
合肥工业大学机械与汽车工程学院 张 奎 吴其林 张爱武 黄啸林 李遵义
【摘要】良好的车辆的操纵稳定性是参赛赛车能够在大学生方程式汽车大赛(简称“中国FSC”)中取得顺利的关键,因此针对车辆操纵稳定性的赛车整车控制器的开发就尤为重要。区别于传统的乘用车的整车控制器,大学生方程式赛车的整车控制器的功用主要是满足车辆的动力性和操纵稳定性,对其他性能则相对忽略。因此大学生方程式赛车的整车控制器相对较简单,其中方程式电动赛车的整车控制器要求满足能接收电子油门信号,与电机控制器和电池之间进行CAN通讯,并进行相应的控制,能满足制动可靠性,车辆行驶稳定性,控制的准确性即可。
【关键词】方程式赛车;控制器;CAN通讯;稳定性
引言
中国大学生方程式汽车大赛(简称“中国FSC”)是一项由高等院校汽车工程或汽车相关专业在校学生组队参加的汽车设计与制造比赛。各参赛车队按照赛事规则和赛车制造标准,在一年的时间内自行设计和制造出一辆在加速、制动、操控性等方面具有优异表现的小型单人座休闲赛车,能够成功完成全部或部分赛事环节的比赛[1]。
目前我国在方程式赛车上的整车控制器开发上与国外还有较大差距,像国外以斯图加特大学为代表的一类大学,由于这类大学的电车用轮毂电机驱动,因此他们开发的整车控制器不仅仅单纯的控制转矩和转速的输出,还要做到电子差速,对整车控制器的稳定性有更高的要求,而且其技术已经相当成熟。就国内看来目前仅有上海交通大学、同济大学、北京理工大学等几所名校在开发双电机驱动的整车控制器,其他的主要有两种形式,一种是比较简单直接的通过电子油门直接控制电池放电电流,进而控制电机控制器从而输出转矩使赛车移动;另一种是同时可以与电池、电机控制器进行通讯进而根据驾驶员意图控制转矩输出的整车控制器,这种控制器相对来说控制水平更加稳定,整车控制器需要具有运行稳定,可靠,反应灵敏等要求,其结构相对来说复杂,是保证整车各部件正常工作的必要条件。鉴于此,开发可以满足方程式赛车规则的整车控制器也尤为必要。
本文主要介绍具有激活电池管理系统(BMS)、接收分析电子油门的信号,与电池管理系统(BMS)和电机控制器进行通讯,同时判断制动信号和油门信号再控制输出转矩输出等功能的一款满足方程式赛车规则的整车控制器。
1 总体设计方案

图1 稳压模块
整车控制器由主芯片,稳压模块,独立CAN控制模块,CAN收发模块,输出控制模块等部分组成。由方程式赛车小电池组降压供电。整车控制器布置于方程式赛车前环附近,这样布置即可以减少电池及电机控制器之间大电流放电产生的电磁干扰,又靠近角度传感器和LCD,布线相对简单。其工作过程可分为启动和控制运行两个阶段,其工作原理是当整车控制器接收到启动按钮的信号,便开始鸣笛并同时激活电池管理系统(BMS),整车控制器随时接收来自电子油门和制动器的信号并加以分析判断来输出转矩。
2 硬件设计
2.1 稳压模块
由于方程式赛车需要以小电池作为启动电源,一般小电池电压选在12V,但是整车控制器的工作电压为5V,这就需要进行降压处理,同时为了使整车控制器更加稳定的工作也需要设计稳压和滤波电路。本文介绍的稳压电路分两级采用了三端稳压管78M09BDT和78M05BDT,并配有单向电容器,电容器加以滤波。由于78M09BDT更耐高压,经过78M09BDT稳压后,78M05BDT可以处于一个相对稳定的环境。其中5V稳压电路如图1所示,图1中12V的电压来自电车的安全回路,通电时经过单向电容C1和电容C2滤掉一部分干扰谐波,经过78M09BDT后电压降为9V,同样经过后面的两个电容C3和C4又滤掉一部分干扰谐波,再经过78M05BDT之后电压即降为5V,此时再经电容C5滤波即可得到相对稳定的5V直流电输出。
2.2 主芯片模块
本文采用的主芯片模块是ATmega16L-8AC,ATmega16L-8AC是一款8位嵌入式微控制器,带有16K字节的系统内可编程闪存,其工作电压为2.7V-5.5V,运算速度为8MHZ,可以满足赛车使用要求,其I/O口数虽然为32,但是可以通过扩展来满足要求。由于ATmega16其内部没有自带CAN控制器,所以要搭配一个独立的CAN控制器。其中主芯片的电路图如图2所示,LCD通讯信号,两路来自油门角度传感器的信号,BMS 启动信号,制动灯信号,制动可靠性回路信号都分别接入了主芯片模块,主芯片通过对这些信号进行分析判断从而输出正确的各路信号。

图2 主芯片外接电路
2.3 微控制器模块
SJA1000是一种I/O设备基于内存编址的微控制器,整个电路中最重要的芯片之一。其中AD0-AD7为SJA1000进行通信的并口,RX0和TX0是CAN的通信口。在整车控制器中,采集油门踏板和制动的信号工作由SJA1000来完成,电子油门的双路信号直接输入到SJA1000的通信并口,采集作为监测信号,对比制动踏板信号并能够同时根据电池状态发送电机功率的调整指令,从而输出正确的转矩信号。SJA1000外接电路如图3所示。
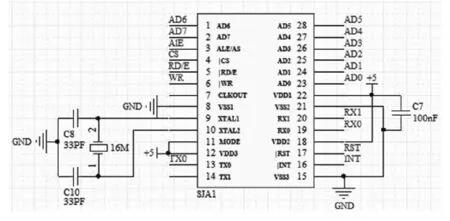
图3 SJA1000外接电路
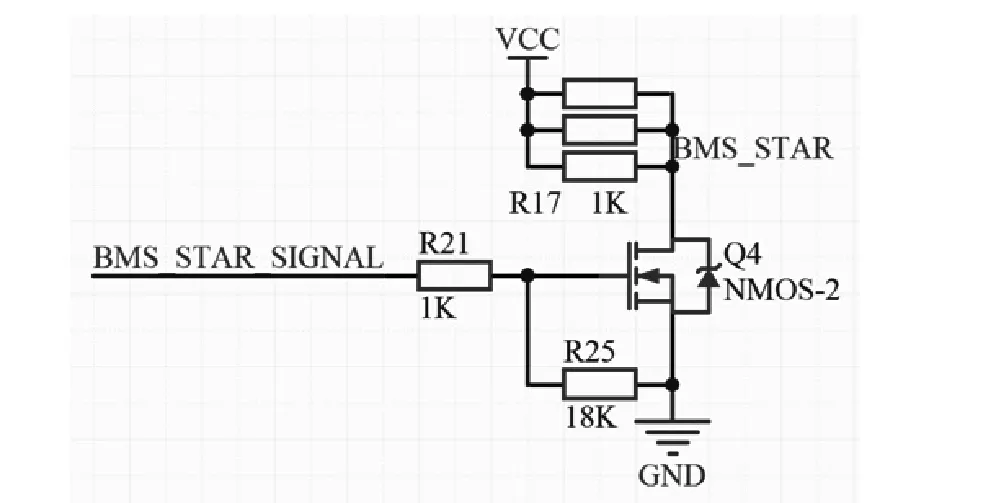
图4 BMS激活电路示意图
2.4 激活BMS模块
根据方程式汽车大赛的要求,仅闭合安全回路时,赛车不允许进入待驶状态,即BMS不可以直接由安全回路激活,因此BMS需要设立一个专门的启动按钮,当按下按钮时,一个12V的高电平信号会激活BMS。本文介绍设计的BMS激活电路如图4所示,从图4可以看出,使用场效应管将单片机的5V信号放大,同时接电源端采用多个电阻并联的形式以满足激活BMS时有足够的驱动电流。
2.5 制动启动
赛车对于启动部分的设计的要求是踩下制动的同时按启动按钮赛车才能进入待驶状态,这样可以避免在按下启动按钮时程序出现紊乱电机突然发力使赛车冲出去的情况。所以单片机除了接收制动踏板的信号,还要接收启动按钮的开关信号。因此本文采用的制动启动的上拉电阻线路,按钮的一端接地,另一端接STAR_BUTTON,未按下时STAR_BUTTON脚为高电平,按下时按钮时被拉到地,为低电平。
3 软件实现
在大学生方程式汽车大赛中,整车控制器的主要工作是接收电子油门的两路角度传感器信号,通过计算分析与相应的逻辑控制转矩的输出。整车控制器系统控制流程如图5所示,当安全回路接通时,系统开始上电,当整车控制器检测到制动踏板踩下并按下启动按钮时开始程序的初始化,即此时整车处于待驶状态,在赛车运行过程中整车控制器需要同时检测来自电子油门的两路信号和制动的一路信号,如果只检测到油门信号则输出转矩,但只要检测到制动信号到一定强度便立即中断转矩的输出。其中电子油门的两路角度传感器信号偏差不允许超过10%踏板行程,超过时整车控制器即需要切断电机动力输出。接收油门的角度传感器信号同时,整车控制器还需要解析制动踏板的位移传感器信号。当电子油门的行程超过25%,只要踩下制动踏板整车控制器即需要中断动力输出;当电子油门的行程在5%以内时,动力才可以输出。此外,整车控制器还需要与电池进行通讯,控制电流的输出,防止电池放电倍率过大烧坏电池以达到保护电池和电机控制器的目的。
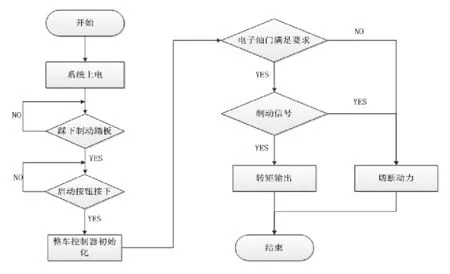
图5 系统流程图
4 结论
FSAE电动赛车是一种专为比赛而设计制作的赛车,由于是竞赛式比赛,所以控制器的可靠性与稳定性是最重要的,其追求的功能不在于多,而在于稳定控制以顺利完赛。因此其在加速,刹车,操纵性方面都要求有优越的操作性和稳定性。本文介绍的整车控制器是基于方程式赛车规则开发的,该整车控制器在保证赛车良好的加速性和操作稳定性的同时,也能使赛车灵敏度有较大提高。虽然其功能较为简单,但其目的是以最准确最可靠的状态采集油门和制动信号来控制输出转矩,是赛车正常工作的必要条件。
参考文献
[1]2015FSC&FSEC CHINA Rules(Final)20150119
[2]胡汉才.单片机原理及其接口技术(第2版)[M].清华大学出版社,2004
[3]郭天祥.51单片机C语言教程—入门.提高.开发.拓展全攻略[M].电子工业出版社,2009.
[4]姜海斌.纯电动车整车控制策略及控制器的研究[D].上海交通大学硕士学位论文,2010.
[5]李伯成.嵌入式系统可靠性设计[M].电子工业出版社,2005.
