基于Arduino的双耳玻璃杯自动贴耳装置设计*
2015-03-02任仁凯舒方强
任仁凯,彭 晨 ,舒方强
(南京师范大学电气与自动化工程学院,江苏南京210042)
0 引 言
近年来,双耳玻璃杯作为常用的冲茶器具,凭借其方便灵活的设计以及较高的观赏性和趣味性,受到茶客的广泛欢迎。看似小巧,然而其制作工艺却颇为复杂。
根据文献[1-2]所述,研究者一直致力于实现普通玻璃杯制作的自动化,所设计的玻璃杯制作流程大体分为三道工序:①截料工序,将玻璃管料截成成品玻璃杯高度两倍的玻璃管料段;②成底工序,把截好的玻璃管料段加热切割烧结形成两个杯底坯料;③打磨工序,对毛坯杯的杯底和杯口进行打磨。而制作双耳玻璃杯则需要再加一道工序:贴耳工序,在玻璃杯两侧安装用于手持的耳状构件。显然,贴耳工序是一个重要环节。在传统家庭作坊式生产中,双耳玻璃杯贴耳工序是纯手工操作,工作环境较为恶劣,生产效率低,且成品质量参差不齐。而大型制造厂的生产机器则价格昂贵,且需要专业技术人员操控,无法大面积推广,严重限制了本行业的发展。
该设计将从工艺流程、机械结构和过程控制三方面展开,研制的操作装置能够自动完成双耳玻璃杯的贴耳工序,使得产品的生产时间大大缩短,从而方便操作,节约人力,减少成本。
1 工艺流程设计
双耳玻璃杯的贴耳工序可具体细分为四道工序:①固定工序,固定待贴耳的玻璃杯和耳状构件;②灼烧工序,点火并对玻璃杯和耳状构件的贴合点进行灼烧直至熔化;③粘结工序,玻璃杯和耳状构件接触并粘结;④取回工序,取下制作好的双耳玻璃杯。
前三道工序分别对应双耳玻璃杯自动贴耳装置的3 个位置,且有如下一些设计要点:①起始位置,启动或紧急停止都要复位到起始位置再开始运行;②灼烧位置,点火器点火并灼烧贴合点一定时间直至部件熔化,且灼烧时间t 可调节;③粘结位置,玻璃杯和耳状构件接触后需迅速回拉一段微小距离再粘结,且回拉距离s 可调节。这些对操作装置的具体设计提出了要求。
2 机械结构设计
双耳玻璃杯自动贴耳装置主要包括主控机构,点火机构,夹持机构,移动机构和检测机构5 部分[3-4]。其主视图和俯视图如图1 所示。
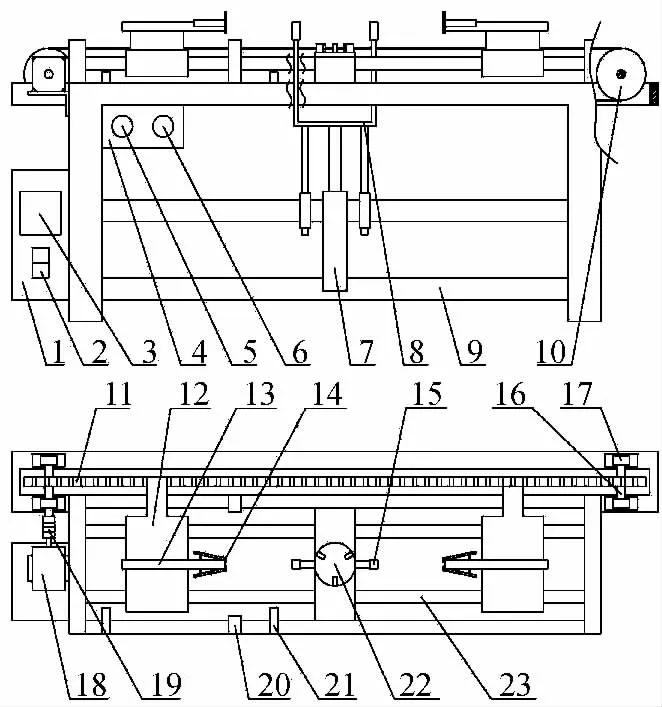
图1 操作装置主视图和俯视图
主控机构由主控箱和控制盒组成。主控箱内有控制电路,外壳嵌有运行/调参开关和液晶显示屏,开关采用2 路6 脚2 档船型开关,显示屏用于调参时的数据显示。控制盒嵌有启动/加按钮和停止/减按钮,对应不同工作模式进行控制,简单有效。
点火机构由点火器、支撑架和电动推杆组成。点火器左右各1 个,可以点燃煤气和氧气的混合燃气,用于对玻璃杯和耳状构件的灼烧。电动推杆通过支撑架与2 个点火器相连,可带动点火器在一定行程内升降,从而不妨碍后续运行。
夹持机构主要是三爪卡盘,能够有效固定住待贴耳的玻璃杯。
移动机构主要由步进电机,传动机构、抓取机构和导轨四部分组成。步进电机使用57 步进电机,扭矩大,精度高,为整个装置提供动力。传动机构采用链传动,结构简单,平均传动比准确,传动效率高;而且,链条在步进电机停止运行的情况下可以轻松转动,便于后续调参模式的设计。链条安装在左、右2 个链轮上,链轮通过链轮轴安装在轴承座之间,其中一边的链轮轴通过弹性联轴器与步进电机相连。传动机构保证了动力的平衡稳定输出。抓取机构由滑座、固定杆和弹簧夹钳组成。滑座左右各1 个,安装在平行的2 根导轨上,其中一侧滑块与链条上半边相连,另一侧滑块与链条下半边相连,从而实现左、右对称同步滑动。弹簧夹钳通过固定杆安装在滑块上,具有特制卡槽,可以夹住耳状构件。整个移动机构实现了步进电机带动抓取机构在导轨上对称同步前进和后退。
检测机构由限位开关和光电开关组成。限位开关有2 个,安装在一侧导轨的首尾。光电开关采用对射式,包括发射部分和接收部分,分别安装在导轨的两侧。外侧的限位开关处是起始位置,光电开关处是灼烧位置,内侧的限位开关处是粘结位置,当滑块移动到相应位置就会触发开关,返回信号,进行相应操作。通过调整开关的位置,即可控制滑块移动的范围。
3 过程控制设计
本研究在机械结构设计基础上,对双耳玻璃杯自动贴耳装置进行电路设计和程序编写,开发了运行和调参两种工作模式。
3.1 控制电路
双耳玻璃杯自动贴耳装置的主控箱内有控制电路,主要包括主控模块、电源模块、驱动模块和检测/调参模块四部分。
主控模块采用的是Arduino Nano 核心板[5-7],体积小巧,价格便宜。Arduino 基于AVR 平台,编程简单,Nano 核心板使用5 V DC 供电,时钟频率16 MHz,低电平复位,具有2 KB 内存,32 KB 闪存,1 KB EEPROM,14 个数字I/O 口,8 个模拟I/O 口,完全能满足该装置的控制要求。
该装置采用220 V AC 供电,需要转换成各元器件所需电压。电源模块先使用150 W 24 V 开关电源将市电降压、整流、滤波后变成24 V DC 稳压电源,再通过LM2596-5. 0 稳压芯片提供5 V 电源,最后通过LM1117-3.3稳压芯片提供3.3 V 电源。
其电路原理图如图2 所示。
该装置的驱动模块包括电动推杆、电磁阀和步进电机3 部分的驱动,其电路原理图如图3 所示。
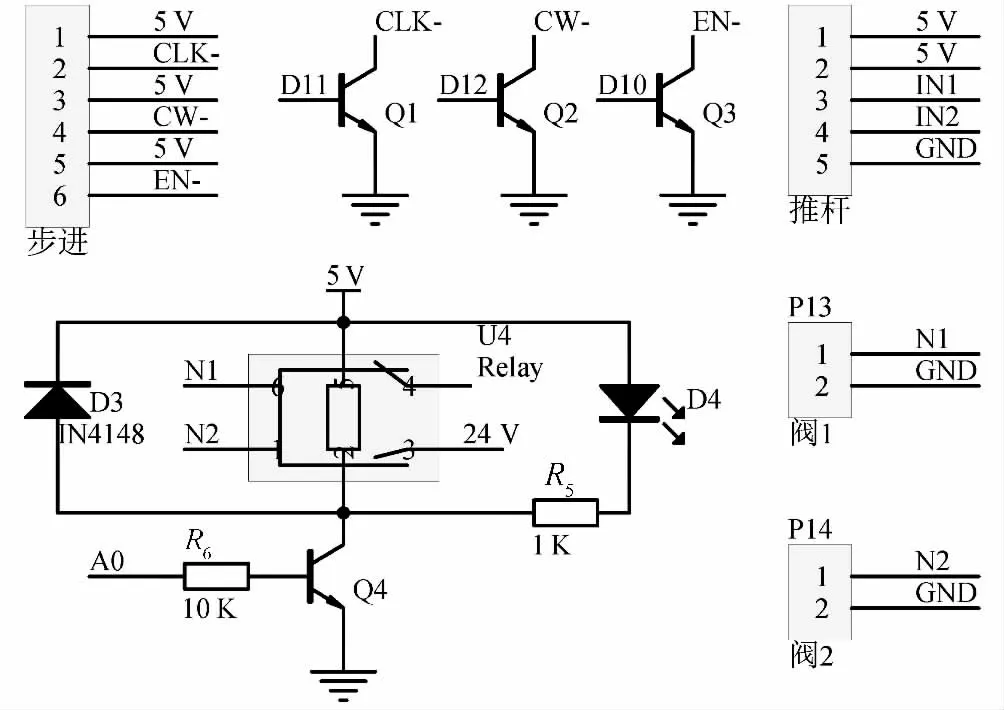
图3 驱动模块电路原理图
电动推杆内部是直流电机,由AQMH3615 驱动器[8]驱动,使用24 V DC 供电,采用半桥驱动芯片和110 A 大功率MOS 管,以及门电路驱动逻辑控制,高效而可靠。通过IN1 和IN2 两路信号控制电机正反转和刹车,从而实现电动推杆的升降。
电磁阀采用2 W 24 V 常闭电磁阀,小巧方便,响应速度快。通过A0 信号控制继电器,实现电磁阀的开闭,从而控制混合燃气的通断。
步进电机由TB6560 驱动器[9-11]驱动,使用24 V DC 供电,稳定可靠,抗干扰性强。其细分数有4 种,最大16 细分;驱动电流范围为0.3 A~3 A,共有14 档;具有自动半流、低压关断、过流保护和过热停车功能。步进电机驱动器连接图如图4 所示,驱动器与控制器采用共阳极连接,由脉冲、方向、使能3 路信号控制,通过高速光耦进行隔离,起到保护作用。
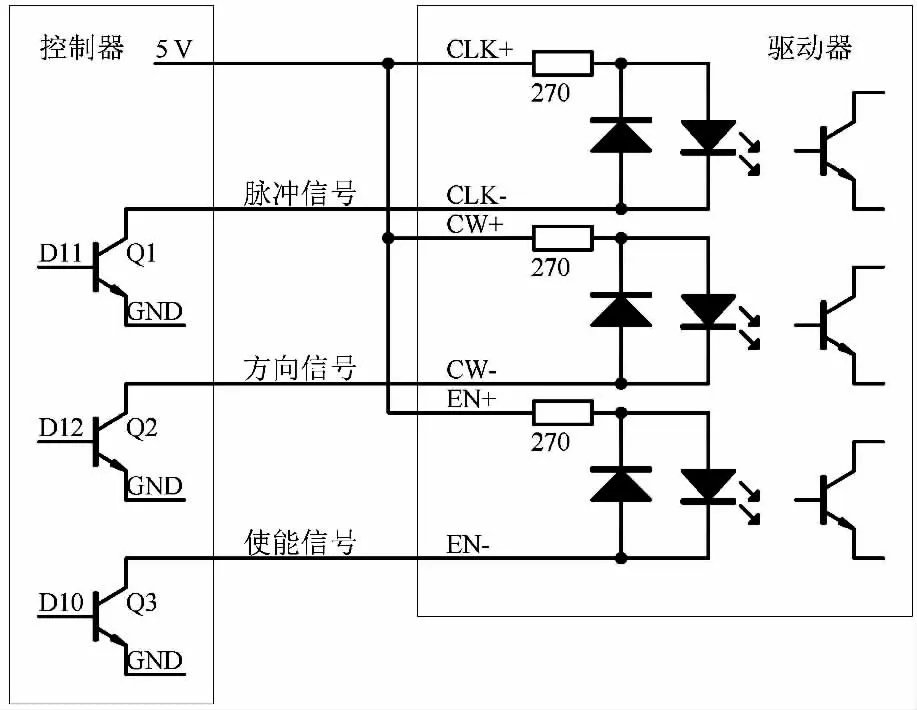
图4 步进电机驱动器连接图
装置有运行和调参两种工作模式。检测/调参模块对应不同工作模式分别起不同作用,其电路原理图如图5 所示。当开关置于运行档,限位、光电开关用于检测滑块位置,启动按钮控制运行,停止按钮控制复位。当开关置于调参档,限位、光电开关用于检测调参参数,加、减按钮控制数据的增加和减少,LCD 显示相关参数。LCD 采用5110 液晶屏模块,串行SPI 接口,性价比高,简单易用。
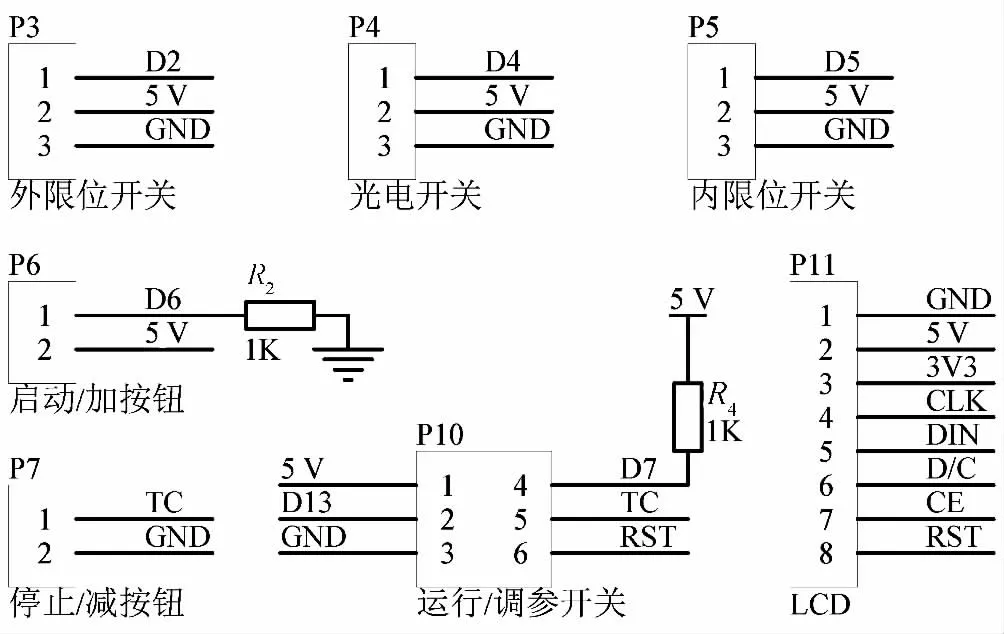
图5 检测/调参模块电路原理图
3.2 运行模式
双耳玻璃杯自动贴耳装置运行前,将待加工的玻璃杯放置在三爪卡盘上固定好,将耳状构件放置在两边弹簧夹钳中夹紧。开关置于运行档,之后运行算法如下:
S1:启动;
S2:复位,步进电机反转,抓取机构后退;
S3:若外限位开关闭合,步进电机正转,抓取机构前进;
S4:若光电开关闭合,步进电机停转,抓取机构停止,电动推杆启动,点火器上升,点火并持续灼烧时间t;
S5:电动推杆启动,点火器下降,步进电机正转,抓取机构前进;
S6:若内限位开关闭合,步进电机停转后反转,抓取机构停止并后退回拉距离s;
S7:停止。
最后,取下制作好的双耳玻璃杯。如果发生意外情况,按动停止按钮,就可紧急停车,装置复位,避免造成事故。
3.3 调参模式
由于双耳玻璃杯类型不同,实际操作时灼烧时间t和回拉距离s 也会不同,需要根据实际情况对操作装置进行调参。为了简化装置,本研究在利用已有元件基础上,增加LCD,开发了调参模式。开关置于调参档,具体操作如下:
(1)移动滑块至灼烧位置,光电开关闭合,进入灼烧时间t 的调整,分别按加按钮和减按钮,调整时间t的长短;
(2)移动滑块至粘结位置,内限位开关闭合,进入回拉距离s 的调整,分别按加按钮和减按钮,调整距离s 的大小。
此外,本研究使用Arduino 的EEPROM 功能,调参后将数据存入EEPROM,可以防止断电后数据丢失。
4 实验及结果分析
本研究根据设计,加工完成了双耳玻璃杯自动贴耳装置,其主控箱如图6 所示。外壳嵌有液晶显示屏和运行/调参开关,内部有主控电路板,电动推杆驱动器和步进电机驱动器。
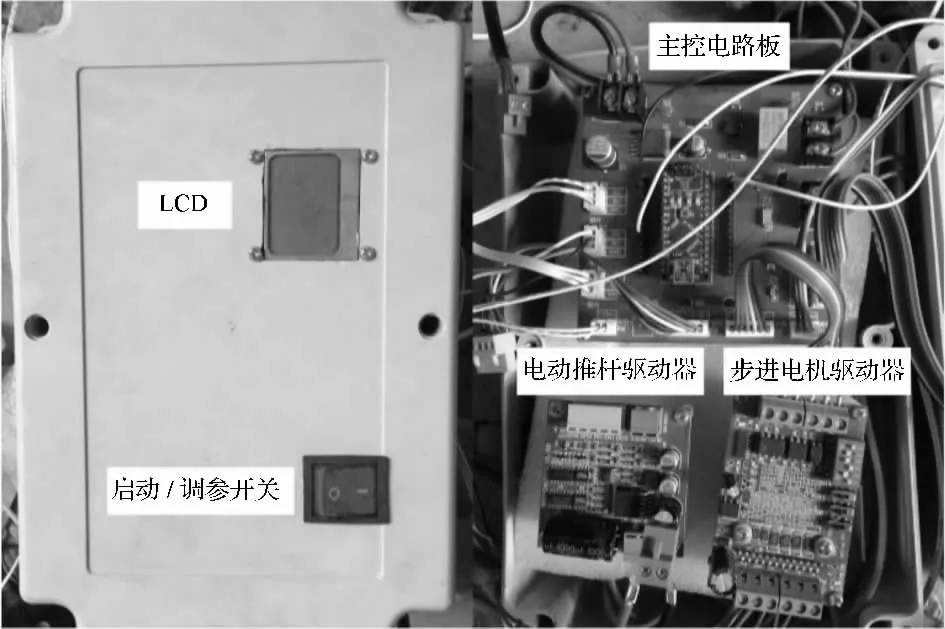
图6 主控箱图
实验测试时,设置灼烧时间t 为5 s,回拉距离s 为3 mm,测得完成1 个双耳玻璃杯贴耳工序平均需要约20 s,且一个工人可同时操作2 台装置。而传统的纯手工操作,一个工人完成1 个双耳玻璃杯贴耳工序平均需要约30 s。相比较,生产效率增加了2 倍,大大节约了人力。
5 结束语
本研究研制的双耳玻璃杯自动贴耳装置有运行和调参两种工作模式,能够自动完成贴耳工序,可根据双耳玻璃杯不同类型进行参数调整。实验测试得到,自动完成双耳玻璃杯贴耳工序的平均时间约为20 s,生产效率增加了2 倍。投入实际生产中,可有效改善工作环境,提高生产效率,节约人力,从而降低生产成本,便于大规模生产和家庭作坊式经营。
[1]郝身峙. 一种用玻璃管制作单层玻璃杯的方法:中国,200810141438.6[P].2011-08-03.
[2]邱靖涛. 一种单层玻璃杯及其杯体的制作方法:中国,201410118492.4[P].2014-07-16.
[3]王啸东,潘健. 玻璃制品自动切口机:中国,201320217601.9[P].2013-11-13.
[4]崔芳平. 一种玻璃杯自动封底机:中国,201310403557.5[P].2014-01-01.
[5]Arduino Nano,ARDUINO[EB/OL]. [2015-01-28]. http://arduino.cc/en/Main/ArduinoBoardNano.
[6]AUSILIO A D. Arduino:A low-cost multipurpose lab equipment[J].Behavior Research Methods,2012,44(2):305-313.
[7]蔡睿妍.Arduino 的原理及应用[J].电子设计工程,2012,20(16):155-157.
[8]AQMH3615NS 直流有刷电机H 桥,成都爱控电子科技有限公司[EB/OL].[2013-06-03]. http://www. akelc. com/DCMotorHBridge/show_34.html.
[9]王党利,宁生科,马宝吉.基于TB6560 的步进电机驱动电路设计[J].单片机与嵌入式系统应用,2010(1):41-43.
[10]刘 霜,李兴根. 新型三相步进电机细分驱动器设计[J].轻工机械,2013,31(4):60-63.
[11]李爱竹,徐柳娟.基于EPM240T100 和TB6560 的步进电机控制系统[J].机电工程,2014,21(5):671-67.
