基于PTZ相机的违章停车自动取证系统
2015-03-02唐晓东
唐晓东
(杭州市公安局交通警察支队科研所, 浙江 杭州 310014)
基于PTZ相机的违章停车自动取证系统
唐晓东
(杭州市公安局交通警察支队科研所, 浙江 杭州310014)
摘要城市道路中的违章停车行为对道路通行能力和通行安全造成很大威胁。传统的地感线圈和雷达设备无法自动检测此类违法行为。由于场景复杂、车辆停放位置不固定、要求监控的场景范围较广等问题,现有基于视频的方式仍无法解决违停行为的自动检测。为此,提出了一种基于PTZ(Pan/Tilt/Zoom)相机的自动取证系统,专门用于检测城市道路中的违停行为。该系统通过检测车辆进出相应预置位区域时的时间,判断车辆是否有违停行为。一旦确认,自动控制PTZ相机拉伸取证。系统自动保存违停前后的静态局部和全局照,并保存整个违停期的相关录像,作为处罚凭证。实验表明,该系统能有效检测违停行为,大大减少警力部署,是一种新型的非现场执法取证系统。
关键词PTZ相机; 违章停车; 视频检测
0引言
近年来,城市小汽车拥有量爆炸式增长。由于城市硬件建设不完善,停车管理体制不健全等原因,城市“乱停车”的问题也随着汽车消费市场的迅速发展而日益凸现。以浙江省杭州市为例,至2013年年底,杭州市机动车保有量超过110万辆,但路面停车泊位全部加起来也不过42万个。2013年杭州市共查处违停124.4万起,几乎平均每辆车都有违停现象。而违章停车带来的后果也日益严重:
(1) 降低道路通行能力。违停车辆往往占用正常的通行车道或者人行横道,不但影响其他车辆的通行,易产生交通拥堵,而且造成行人通行不顺畅,只能穿行于车辆之间。特别是对于消防车和救护车而言,违停乱象会耽误救灾救人的宝贵时间。
(2) 增加交通事故。违章停车使原本狭窄的车道变得更窄,使得行车或者两车交汇时,容易出现碰撞或者刮擦现象,增加了交通事故发生的概率。
(3) 机动车违停现象不仅影响道路通行、交通安全,而且对市容环境、公共安全、社会治安等多方面的消极影响都是不容忽视的。
为了整治车辆违停乱象,交警部门采取了多种方案。如设置违停标记;采用巡查加驻点的方式,对关键路段加强管理;对违停车辆直接拖离;加装球形监控装置,在监控中心手动抓拍违章车辆等等。以杭州市为例,交警部门更是多次开展了“拔钉子”行动和“违停受罚、乱停必拖”为主策略的整治违停大会战。但这些方案均需要大量的警力布置,无法持久,往往只能暂时性地解决问题。另一方面,市区目前虽已布置大量的监控相机,却未有效地加以利用。基于此,本文提出了一种基于视频的违章停车自动取证系统。该系统直接以多路PTZ相机视频作为输入,自动记录并跟踪相机视野内的违停车辆。一旦车辆在指定区域违章停车超过预定的时间,则自动拍照,并保存车辆的违停信息。
1相关工作
基于视频的机动车违法行为检测方法无需破坏路面,维护简单,不会对路面交通状况产生影响,近年来得到越来越多的关注和应用[1-7]。针对车辆闯红灯和车辆逆行两种违法行为,西华大学的骆迪[1]提出了基于视频的检测方法。论文[2]详细介绍了基于IP 相机的车辆违章行为检测,利用车辆目标检测和车辆跟踪技术,对车辆闯红灯、违章停车、违章压线或变道、违章掉头4种车辆违章行为进行了研究。严杭晨等[3]也提出了一种基于计算机视觉的车辆闯红灯违法行为检测方法。李宗阳等[4]利用均值漂移算法进行运动目标跟踪,从而完成了基于视频的闯红灯违法行为自动检测系统。周为刚等人[5]通过车辆和行人的分别检测,提出了一种基于视频的斑马线前机动车未礼让行人的自动检测系统。赵怡等[6]通过主流视频技术的分析对比,提出并研究设计了一套基于视频技术的智能交通系统。该系统具有车辆流量检测统计,违法行为抓拍等功能。厦门大学的郭灿阳[7]也提出了基于高清视频的车辆交通行为识别系统,对闯红灯车辆和不按规定车道行驶车辆进行抓拍和识别。而在产业界,基于视频的交通违法行为自动检测系统也开始推广。除了海康、大华等企业外,科达也在2014年推出动态违法抓拍系统,通过手动操控,当发现有违章停车、闯红灯、违法变道、压双黄线等违章情况时,前端PTZ摄像机将实现抓拍,并手动恢复摄像机预置位等。这种动态抓拍系统具有先进的视频检测技术,可对大范围违章区域进行检测和车牌识别,取代现在人工检测的繁琐劳动。
综上所述,基于视频的分析技术已广泛应用于车辆违法行为检测系统。这些违法行为包括车辆闯红灯、过斑马线未礼让行人、机动车辆实线变道、机动车逆行,等等。但是由于车辆停放方向不一(可能是车头、也可能车尾或者侧身),目标大小不一(远离球机的目标更小),远距离车辆可能无法看清车牌(目前的球机分辨率大多低于200万像素),且涉及PTZ相机拉伸距离的自动控制,目前针对基于PTZ相机的违章停车违法行为自动检测的研究还不多见。为此,本文提出了一种新的基于视频的违法行为检测系统。该系统通过分析视频,可以自动检测违停行为,并自动控制PTZ相机进行抓拍取证。与上述现有系统相比,本文提出的检测系统具有以下优势:
(1) 无需手动操控PTZ相机。不管是监控还是取证拉伸,都由系统自动完成。相机根据系统定位到的目标坐标自动拉伸。
(2) 可自由设置检测区域。整个系统基于视频分析技术,可以在指定的预置位设定检测区域,并仅限该区域进行违停检测。
(3) 取证数据完整统一。一旦检测到违法行为,将自动取证,且每次取证都由抓拍图组和相应的视频组成,非常完整和统一,更利于后续的行政处罚。
(4) 方便与后台系统对接。和现有典型的非现场执法系统(如闯红灯行为检测系统)一样,可以自动完整取证、数据上传、数据处理(如车牌识别等),更加方便与交警后台系统对接。
2系统设计
2.1 系统结构
整个系统的架构如图1所示。主要包括三大模块:数据获取模块、基于视频的检测模块、后台存储模块。

图1 基于PTZ相机的违章停车自动取证系统架构图
(1) 数据获取模块:数据获取模块主要由数台PTZ相机和交换机组成,不同的PTZ相机覆盖不同的检测区域。每路相机数据通过交换机传输到检测主机。
(2) 基于视频的检测模块:视频检测模块主要由目标检测与取证数据存储两大功能组成。该模块利用数据获取模块的视频输入,自动检测车辆的起止停放时间。一旦停放时间超过规定时间,则自动操作球机拉伸,抓取能看清车牌的局部放大图,作为违法凭证进行保存。
(3) 后台存储模块:该模块接收来自视频检测模块的违法数据,保存在指定的数据库中。并提供相应的Web Service接口,供内部的客户端检索和浏览。
2.2 取证设计
作为一种非现场执法系统,取证设计是整个系统的关键。合理有效的数据凭证才能成为违法处罚的依据。如图2所示,两条黄线之间的区域为禁停范围。整个取证过程如下:
(1) 车辆进入并停放。准备违停的车辆进入违停区域后,视频检测模块将检测到目标。一旦车辆停放,系统将保留停车的具体时刻和车辆的全景图,如图2所示的Ⅰ,并在取证图像上保有停放时的时间戳T。
(2) 局部放大图。车辆处于停放状态时,系统自动驱动PTZ相机拉伸镜头,获取停放车辆的局部放大图,并识别车辆的车牌信息,如图2所示的Ⅱ。

图2 违法停车取证数据组成
(3) 车辆停放超过规定时间的取证。如果车辆停放的时间超过规定的时间t,系统将再次保留车辆的全景图,同时保存当前的时间戳T+t,如图2所示的Ⅲ。
(4) 第二次局部放大图。为了确保取证的准确性,需要再次拉伸相机,比对车牌,如图2所示的Ⅳ。如果局部放大图Ⅱ和Ⅳ中的车牌一致,则确认该车辆违章停车违法行为成立。同时,系统还将保存车辆从停车时到超过违停时间段整个过程的录像。
作为取证数据,保存的违法图片需要符合国标GA/T 832—2009《道路交通安全违法行为图像取证技术规范》。因此,如果满足违停标准,整个系统保存的取证数据包括4张照片和1段视频。在实际应用中,4张违法图片的组成有两种可能的方式,如表1所示。其中,图2的取证方式代表方式二,下文中的图4的取证方式代表方式一。
3违停检测算法
整个系统的核心软件安装在图1所示的视频检测模块,其主要功能包括:违法行为检测、取证数据保存。违停的核心算法主要采用背景建模与基于内容的目标识别,具体流程如图3所示。以下针对检测算法进行详细介绍。
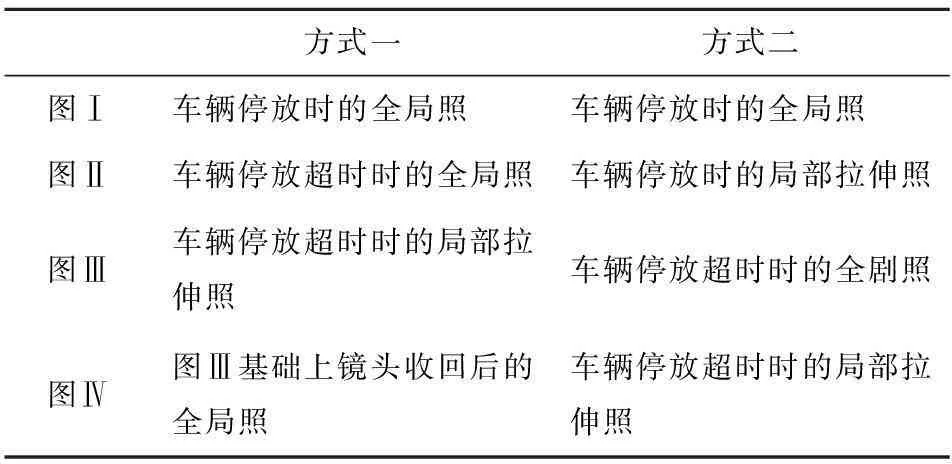
表1 4张违法图片的组成方式
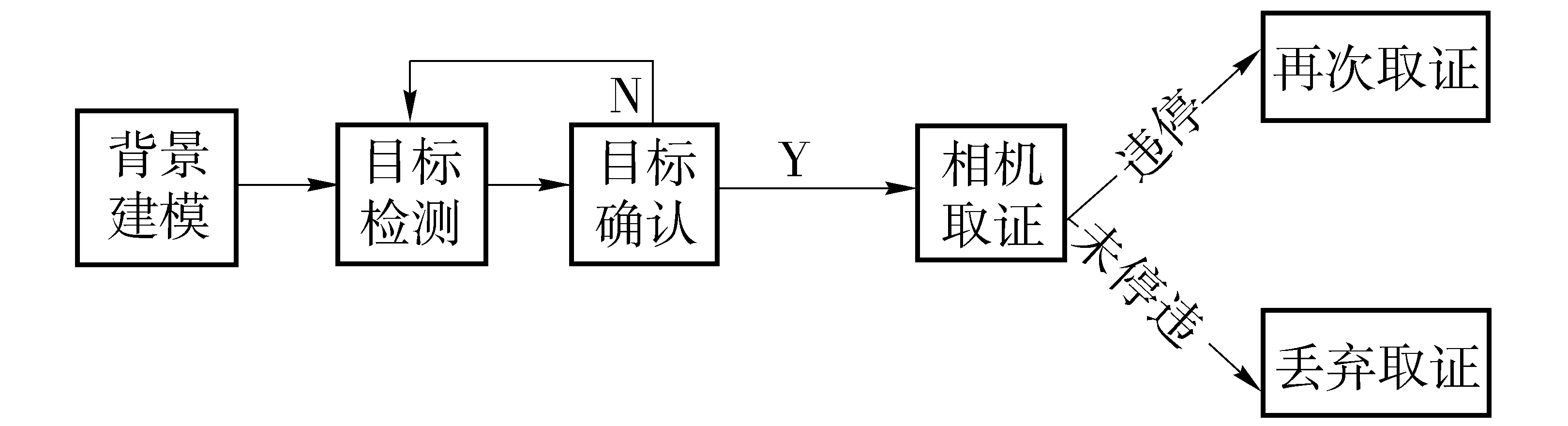
图3 违停检测算法流程
(1) 背景建模:背景建模目的是为了获取相对稳定的背景图。本文采用了高斯混合模型(GMM: Gaussian Mixture Model)[8],沿时间轴为图像中的每个像素建立混合高斯模型,并每隔一段时间进行更新。GMM方法相对比较稳定,能适应白天的各种情况。为了保证夜间的效果,需要先对每帧图像进行非线性的亮度拉伸。
(2) 目标检测:通过当前帧与建模后的背景进行差分,然后二值化,利用形态学中的腐蚀算子填补目标中的空隙。选定二值化后具有一定面积的联通区域作为检测到的目标,进入下一步运算。
(3) 目标确认:由于除了机动车外,任何移动目标都可能会被检测到,包括移动的人群、移动的自行车和人等。因此,需要对上述检测到的目标进行确认。本文通过Harr特征[9]训练得到的线性判别函数(Linear Discrimination Function)对目标进行确认。一旦确认是机动车辆,则进入下一步。否则,返回上一步。
(4) 相机取证:一旦检测到目标,需要控制PTZ相机拍照,保存一张车辆刚停车时的图像。
(5) 再次取证:当系统再次检测到原本停放车辆的移动后,通过比对前后时间,确认车辆是否停放超时。一旦确定违停,则再次取证,并拉伸相机,保存车辆的局部放大图。
针对常见的200 W像素的PTZ相机,由于相幅较大,全尺寸计算比较耗时,因此,首先需要对图像进行缩放,减少运算量。上述所有步骤都基于缩放后的图像进行。为了保证效果,有时还需要对图像进行平滑和Gamma校正等前处理。这种GMM背景建模加基于内容的目标检测方式有以下优点:
(1) 与一般的背景差方法相比,GMM背景建模虽然速度慢了点,但是抗干扰能力强,对于非目标移动(比如光照变化等)引起的场景变化具有更好的应变能力。
(2) 作为刚体,机动车的特征是比较统一的。基于多侧面、多尺度的Harr特征,可以更准确地判断移动目标是机动车,而不是行人、非机动车。这比基于尺寸、纹理或者颜色等低阶图像特征的判断更加鲁棒有效。
(3) 将背景建模与目标检测的方法相结合,仅针对画面中有变化感兴趣的区域进行检测,不用每帧图像都进行处理,可以大大加快检测速度。目前,系统的处理速度平均达到15 FPS(Frame Per Second),能做到实时检测。
4实验结果
目前,该系统已经成功研制,并在杭州市部分路段进行了实验。取证方式采用表1所示的第一种方式。图4展示了部分取证结果的四格图。从上到下(从左到右)依次是图Ⅰ、图Ⅱ、图Ⅲ和图Ⅳ。每张图的右上角分别记录了拍摄时间。

图4 系统获得的抓拍案例图
5结语
城市道路的违章停车带来了众多问题,不但影响道路通行,而且可能阻断火灾或者急救等生命通道。为了有效地遏制违停现象,本文提出了一种基于PTZ相机的非现场执法系统,利用视频检测技术和PTZ相机控制技术,自动检测违停现象,并保存相应的图像和视频等凭证,作为违法处罚依据。该系统大大降低了警力的投入,同时覆盖了更大的违停检查范围。
随着DSP和ARM技术的发展,未来可以考虑直接在PTZ相机上嵌入检测算法,从而取消图1中所示的检测主机,这样不但可以降低成本,减少系统的耦合,而且提高了系统的鲁棒性,是未来非常有潜力的发展方向。
参考文献
[1]骆迪.基于视频技术的车辆违章行为检测[D].成都:西华大学,2009.
[2]陈伟强.基于IP Camera的车辆违章行为检测[D].杭州:电子科技大学,2012.
[3]严杭晨,马宝庆,黄磊磊,等.基于计算机视觉的车辆闯红灯行为检测研究[J].交通技术, 2013(2): 158-163.
[4]李宗阳,熊显名. 基于背景差分和均值漂移的闯红灯车辆视频自动检测系统[J]. 计算机应用与软件,2012,29(10):
[5]周为刚,冯阳,徐舒畅.基于视频分析的机动车斑马线前未礼让违法行为检测系统[J].中国人民公安大学学报,2012,2(2):57-60.
[6]赵怡.基于视频技术的交通管理系统的研究与设计[D].上海:复旦大学,2009.
[7]郭灿阳.基于高清视频的车辆交通行为识别系统的设计与实现[D].厦门:厦门大学,2011.
[8]ZIVKOVIC Z. Improved adaptive Gaussian mixture model for background subtraction[C]∥Pattern Recognition, 2004. ICPR 2004. Proceedings of the 17th International Conference on. IEEE, 2004, 2: 28-31.
[9]VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features[C]∥Computer Vision and Pattern Recognition, 2001. CVPR 2001. Proceedings of the 2001 IEEE Computer Society Conference on. IEEE, 2001, 1: Ⅰ-511-Ⅰ-518. vol.1.
(责任编辑陈小明)
作者简介唐晓东(1970—),男,浙江人,高级工程师。研究方向为公安交通科技及ITS。
中图分类号D631.5
