厦门市连续运行卫星定位服务系统(XMCORS)建设与应用
2015-03-01李威
李威
厦门市连续运行卫星定位服务系统(XMCORS)建设与应用
李威
(福建省鼎坚建设发展有限公司 福建厦门 361006)
城市区域CORS系统的建立,为城市测绘提供了参考基准,同时也实现了全天候不间断RTK定位差分数据服务。现以厦门市连续运行卫星定位服务系统(XMCORS)为例,介绍了系统建设的一般过程,通过实测检验系统运行的正确和稳定性,对CORS系统的再建及RTK作业有一定的参考意义。
CORS RTK
1 引言
连续运行参考站系统(CORS)是在研究区域范围内,建立由若干个连续运行参考站、通信链路、数据中心和用户终端构成的局域网络,实时地向用户提供不同类型的GNSS观测值(载波相位、伪距)等,以及其他服务的系统[1]。
目前,全国已有多个区域、多个行业的CORS系统,多数地区未能实现跨行业、跨地区的联网。厦门市趁着福建省CORS建设的东风,于2010年建成了市级的CORS网络并运行至今,取得了良好的效果。
2 参考站的选址和建设
2.1 参考站选址
参考站的选址十分重要,因其观测质量直接影响到差分数据生成及RTK定位精度,除了满足参考站网之间构成良好的几何图形外,应根据以下原则进行[2]:
1)远离周边的高大建筑、树、水体、海滩和易积水地带,其距离不小于200m;
2)远离电磁干扰区(微波站、无线电发射台、高压线穿越地带等)和雷击区,其距离不小于200m;
3)应有10°以上的地平高度角卫星通视条件;
4)参考站应避开地质构造不稳定区域:断层破碎带,易于发生滑坡、沉陷等局部变形的地点(如采矿区、油气开采区、地下水漏斗沉降区等),易受水淹或地下水位变化较大的地点。
此外,选点时应考虑到便于接入公共通信网络,具有稳定、安全可靠的交流电电源以及交通便利,便于人员往来和车辆运输。图1为最终选址后的参考站点分布图,北部地处山区,网点间距略大于南部城区范围,网点间平均间距26公里。
2.2 站点硬件设备架设
各站点的主要任务是将连续观测的GPS/GLONASS卫星信号,通过光纤传回控制中心。因此,其应满足不间断电源供应、稳定的网络等基本条件,同时应满足防雷、防电涌等要求。图2为各站点硬件设备构成。
站点建设的重点之一是防雷,雷击很容易击穿天线,造成设备无法正常工作,特别是位置较高的山头,需要一套有效的防雷系统。另外电涌也是电子设备的“杀手”,在市电不稳定的地区,UPS(不间断电源)稳压系统也是必不可少。
3 网络的选择及控制中心的架设
3.1 网络的选择
数据通信网络是连续运行卫星定位服务系统的核心单元,同时也是关键部分,其服务质量(Quality of Service,QoS)将直接决定CORS系统的可靠性、可用性。根据XMCORS总体设计方案,通信网络指标要求如下:
1)可靠性大于或等于95%。
2)日可用性大于或等于95%。
3)参考站端接入带宽大于或等于512kbps,控制中心端接入带宽大于4M。
4)误码率小于10-8。
目前,流动端用户可通过移动的GPRS或电信的CDMA2000接入XMCORS专网,其传输速率完全满足RTK实时定位的要求。数据传输网络的冗余性给用户提供了选择,同时也较大程度上保证了系统服务的可靠性。
3.2 控制中心软件
控制中心的最重要工作是收集观测数据并生成虚拟观测值,虚拟观测值的生成技术有VRS(代表有Trimble的GPSNET软件)、FKP等[3]。其关键是如何将与位置相关的改正,如几何相关项改正、电离层延迟改正、对流层延迟改正、轨道误差改正、多路径延迟改正等分离并建模,形成“原始”的非差相位虚拟观测值。
虚拟观测值的质量好坏直接关系到定位结果。XMCORS的各参考站天线为天宝的Choke Ring扼流圈天线,相应的控制中心软件为天宝的GPSNET。同时,XMCORS已完成了大地水准面的精化工作,通过开发第三方软件及增设中间服务器将水准面精化成果内插并发送到流动站,RTK用户通过参数转换和投影直接获得平面坐标和水准高程[4]。
4 流动端连接
流动站与服务器间通信过程大致如下:
1)流动站将NMEA格式单点定位坐标发送到服务器;
2)服务器在该坐标处生成虚拟观测值,通过NTRIP协议传送到流动站;
3)流动站实时求解模糊度,得到固定解。
作业过程中服务器根据流动站返回的位置信息及虚拟参考站之间的距离判断是否需要重新生成虚拟观测站(值),直至作业结束。
5 平面及高层参数转换
按照国家规定,2008年之后的测绘成果都必须采用2000国家坐标。XMCORS各参考站采用2000地心坐标系,然而现存的大量测绘成果及控制点皆为厦门地方坐标(北京54椭球,独立中央子午线)。为实现两不同椭球之间的转换,需要采用一些重合点求解七参数,然而一个问题是重合点的54大地高不准确。不过研究和试验表明,高程方向尽管有误差,转换后的平面精度影响很小。为此根据转换残差尽量小的原则选取了5个重合点求取七参数,流动站端只需输入七参数,选择地方椭球和中央子午线后投影即可获得高精度的地方平面坐标。高程的问题前已述及,通过精化后的似大地水准面,服务器端实时计算虚拟参考站的高程异常,对其坐标进行改化,使其直接“平移”到大地水准面,从而实现各流动站大地高到正常高的转换。
6 系统测试
为测试系统运行效果,在水准面精化及区域统一转换参数求解工作完成后对覆盖全市的24个B级GPS点进行了RTK检测,各点均联测了二等水准。测试仪器为Leica1250,测量时间60s,测试结果见表1。
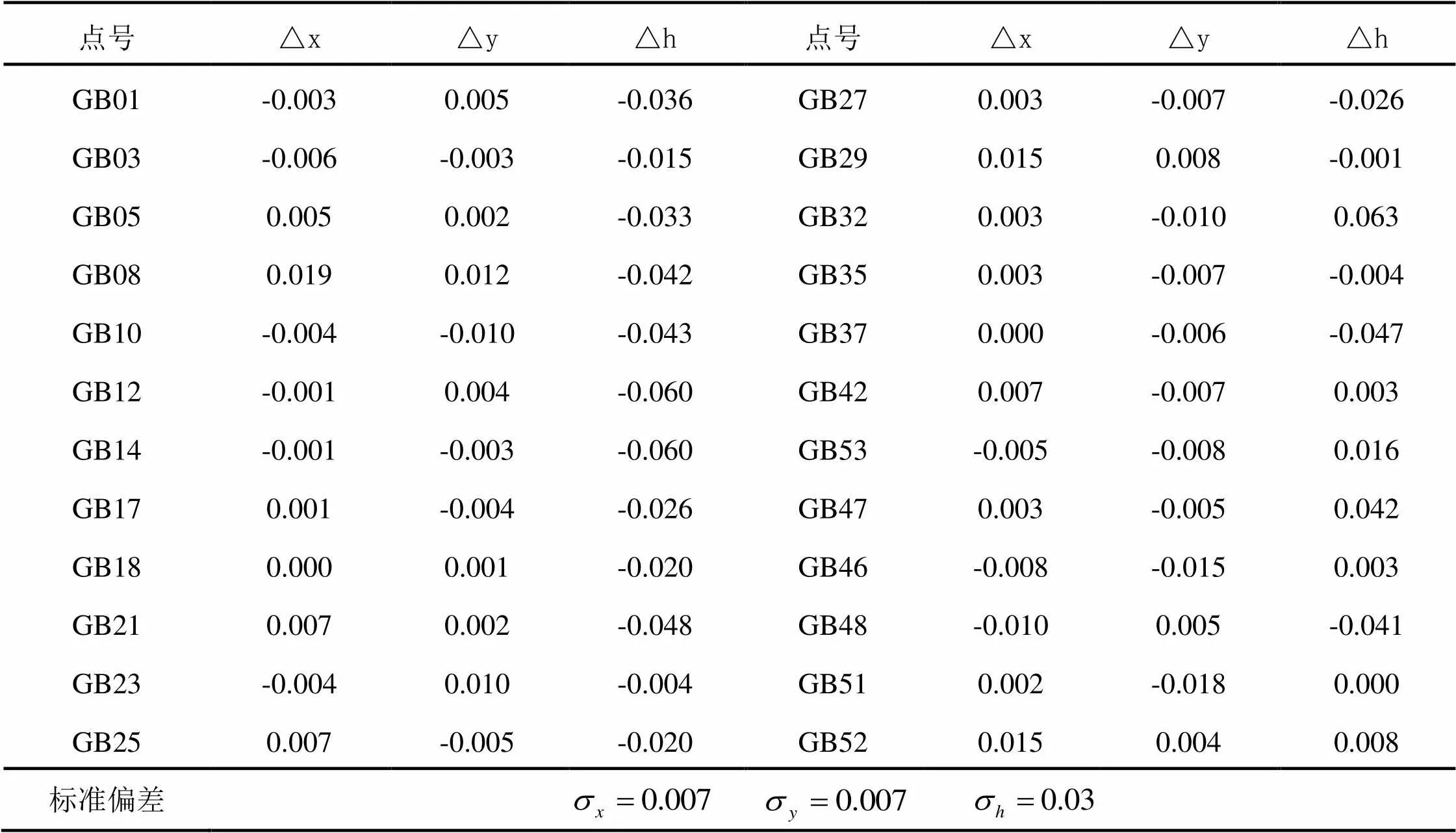
表1:RTK实测平面高程与已知点差值(单位:cm)
从表中可以看出,RTK平面精度很高,达到厘米级,经过精化后的RTK正常高在观测条件良好的情况下能达到5cm。
7 结束语
传统单基站RTK随着离基站的距离越远,定位精度越低,因其电离层、对流层延迟等随着距离加大,误差相关性变弱。误差得不到消除,定位精度将呈线性下降趋势。若要得到厘米级的定位精度,一般流动站与单基站之间的距离不应超过20km。
网络RTK很好地克服了这个缺点,使得基站网内的作业不再受距离的限制,且精度分布均匀。通过较长时间的外业使用,提出以下几点经验:
1)手机信号的好坏对测量结果特别是高程方向的影响较大,在信号不好的偏远山区,高程方向的浮动能达到20cm,选择一个稳定的通信网络十分重要。
2)电离层对外业测量影响较大,特别是低纬度地区电离层活动高峰时段,定位精度降低甚至不能固定模糊度,流动站长时间初始化得不到固定解。控制中心可以根据软件对电离层进行监测,大致预报出不适宜作业的时段。
3)GDOP(卫星几何图形强度因子)也是影响定位精度的重要因素。GDOP值与卫星分布及接收机位置有关。用户可以使用随机软件及预报星历,查看作业范围处的GDOP值,从而避开不宜作业的时段。
随着我国北斗系统的发布和完善,可用卫星数将会越来越多,部分流动设备已能接收北斗信号,相应的XMCORS系统的硬件和软件也需要不断地更新升级,以便为用户提供更好的服务。
[1] 黄俊华,陈文森.连续卫星定位综合服务系统建设与应用[M].北京:科学出版社,2009.
[2] CH/T 2008-2005,全球导航卫星系统连续运行参考站网建设规范[S].
[3] 郭际明,张绍成,孟祥广.VRS与FKP定位模式的研究与比较[J].测绘通报,2011(1):4-5.
[4] 欧阳欣,江春发,郭垂注. VRS模式下流动站获取正常高的方法和实践[J].地理空间信息,2014(1):140-141.
