面向Bayer真彩色航空影像特征匹配的彩色描述符适用性分析*
2015-02-25屈新原,段福洲,赵文吉等
面向Bayer真彩色航空影像特征匹配的彩色描述符适用性分析*
屈新原1,2,3,段福洲1,2,3,赵文吉1,2,3,田金炎1,2,3
(1. 三维信息获取与应用教育部重点实验室,北京100048;
2. 城市环境过程与数字模拟国家重点实验室培育基地,北京100048;
3. 首都师范大学 资源环境与旅游学院,北京100048)
摘要:针对Bayer真彩色遥感影像进行特征匹配时,彩色描述符的效果与适用性问题一直研究较少。结合Bayer真彩色遥感影像成像变化规律和彩色描述符算法特点,从理论上分析彩色描述符的不变性。提出模拟数据评价、不同类别影像评价、任务总体适用性评价等三种实验方法对彩色描述符适用性进行实验验证和分析。通过理论分析和实验评估,总体上彩色描述符中RGBSIFT算法效果最优,对Bayer真彩色航空影像特征匹配有较好的适用性,并且不同地物属性影像在特征匹配时有不同的最优彩色描述符。
关键词:Bayer真彩色航空影像;彩色不变量;彩色描述符;特征匹配;适用性分析
轻型和无人飞行平台搭载各种传感器及时进行遥感影像获取已经成为卫星遥感影像的有力补充。其中Bayer真彩色影像是轻型和无人飞行遥感平台获取的最主要的遥感影像种类之一。与卫星遥感的多光谱不同,Bayer真彩色最主要的特征是分辨率超高(一般高于0.5m)、颜色与地物颜色相同或者相近。但是航空遥感影像在成像过程中受光照变化、平台运动、传感器自身旋转等诸多影响因素,导致同一地物在不同影像上的颜色、纹理、几何、拓扑等特征会发生变化,而这些变化给遥感影像特征匹配带来挑战。传统的影像特征匹配一般基于几何不变性的特征描述符算法,这些描述符对图像旋转、尺度变换、亮度变化等保持良好的适应性,对视角变化、仿射变换、噪声也有一定的稳定性[1-5]。但这些算法通常基于单一波段数据进行处理,没有充分应用遥感影像的光谱信息,如果影像成像过程发生了光谱信息的变化会导致特征点不变性降低[6]。
彩色描述符在几何不变性的基础上加入了彩色信息可以提高光学影像特征点不变性以及区分度[6-12],近几年来被广泛地研究和应用。但是目前彩色描述符主要应用于计算机视觉、图像处理领域[6, 9, 12-14],主要针对的是内容较单一的数码图片或者视频[10, 15-19]。没有考虑到航空影像地物复杂的基本特征。将彩色信息引入成像机理不同、颜色接近地物的Bayer真彩色的遥感影像的特征描述中,其效果与适用性是一个还没有深入研究的新问题。因此屈新原等从Bayer真彩色遥感影像成像变化特点出发,分析不同的彩色描述符不变性,评估彩色描述符对航空光学影像特征匹配的适用性。由于文献[19-21]验证了基于几何不变性中SIFT描述符具有最佳性能,文献[22]验证了基于SIFT算法的系列彩色描述符优势。所以文中选择SIFT描述符以及基于SIFT的系列彩色描述符进行适用性分析。
1Bayer真彩色航空影像变化特点
特征点的不变性与影像变化特点有直接的关系。Bayer真彩色影像是可见光相机获取的最常见数据种类,成像过程受地物反射的太阳直射辐射、环境散射辐射、大气层辐射、交叉辐射、电荷耦合元件(Charge-Coupled Device,CCD)像面光敏函数等多种因素影响[23]。Van De Sande[22]证明了对图像进行求导的情况下背景辐射亮度可以被消除,它和地物的表面反射无关。因此如果特征描述符算法在计算过程中对影像进行了求导,那么该描述符可以消除背景辐射的影响。地物成像除了上述因素以外还与相机自身的CCD成像方式也有直接关系,Bayer真彩色影像并不是直接得到红、绿、蓝(R,G,B)三个波段数据,而是通过数字滤波阵列(Color Filter Array,CFA)来获取单通道数据,然后通过图像重建算法获得接近地面颜色的RGB三个波段数据。
从以上的分析可以看出Bayer真彩色遥感影像成像复杂,地物在成像过程中受大气环境,太阳高度角、拍摄角度、相机自身、地物周围环境、图像重建算法等诸多因素影响,导致同一地物在不同影像上的颜色、纹理等特征发生较大变化。这种变化很难建立精确的物理模型去表达。Finlayson[24]等提出了用一种对角线颜色变化模型来描述相同地物在不同光照情况的变化关系。该模型是实际变化的近似模拟,其优点是可以在复杂度和精确性之间取得较好的平衡[25]。根据对角线模型,相同地物变化后的影像之间存在着变换关系,如式(1)所示。
(1)
fc和fu表示相同地物在不同成像条件下的相机获取的两幅Bayer真彩色的影像。对式(1)分析可以得出,影像在不同成像情况下有二种变化。
1.1 图像亮度的变化
图像亮度的变化有三种可能,如式(2)所示。
(2)
在这三种情况下公式中的对角线参数不发生变化或者发生变化幅度相同。图像偏移量相同或者不发生偏移。当环境中背景散射不发生变化,或者有阴影和薄云时传感器接收到太阳辐亮度和环境散射辐亮度发生相同增强或者减弱,会导致成像的图像发生亮度的变化。
1.2 图像颜色的变化
图像发生颜色变化主要有两种情况。
(O1=O2=O3=0), (a≠b≠c≠0)
(3)
第一种情况是由于地物成像过程中角度发生变化或者大气中颗粒对太阳或者大气辐射光进行吸收和反射,不同波段辐射透射比变化,造成了在Bayer真彩色图像成像过程中RGB每个通道背景辐射变化一致或者接收到的太阳辐亮度和环境辐亮度变化相同时图像发生亮度的变化。这时不同遥感图像存在明暗差别。
(O1≠O2≠O3≠0), (a≠b≠c≠0)
(4)
第二种情况因为受大气条件变化、地物环境复杂等因素影响导致成像时太阳或者大气辐射反射变化、大气光谱透射比的变化以及对环境背景辐亮度产生影响,这时影像每个波段背景辐射变化不一致。 或者相同地物在成像过程中因为收到大气颗粒吸收、散射、大气光谱透射比以及拍摄角度变化影像,导致反射到相机入瞳处时RGB三个波段发生不一致的干扰。
同时由于Bayer真彩色影像是由单波段的彩色滤波数据通过彩色复原得到,所以在光照环境和地物类型较为复杂时,复原得到影像RGB值与真实值之间产生差异。
Bayer真彩色影像成像过程一般既包括颜色变化又包括亮度变化。对于地物内容复杂、纹理丰富的图像之间以颜色变化为主,地物单一、纹理简单的图像之间以亮度变化为主。因此最佳的特征描述符既能对亮度变化保持不变,又能对颜色变化保持不变。
2彩色描述符及不变性分析
目前常用基于SIFT算法的系列彩色描述符有七种,SIFT,HSVSIFT[26],HueSFIT[27],OpponentSIFT[22],CSIFT[10],RGSIFT[27],RGBSIFT[17, 22]。SIFT描述符在计算过程中需要对图像进行求导,根据上一节分析可知求导可以消去大气背景辐射的影响。同时由于SIFT对特征向量归一化可以消去式(2)中对角线参数相同变化的情况,所以SIFT特征描述符剔除了图像亮度变化的影响。但是SIFT算法没有考虑到颜色信息,所以只对图像颜色的变化不具有不变性。HueSIFT以Hue通道作为输入数据,由于Hue通道表示色调和图像亮度无关,所以HueSIFT对图像亮度变化具有不变性。HSVSIFT组合了色调、饱和度、亮度三个通道的特征,相比HueSIFT反而失去了亮度不变性。OpponentSIFT将RGB三个波段转化成对抗彩色空间三个波段,其中前两个波段表征颜色信息,并且SIFT算法本身对特征向量的归一化能消除了部分亮度信息影响,所以OpponentSIFT描述符对亮度变化保持不变。CSIFT计算彩色不变量来作为输入数据,消除OpponentSIFT中前两个通道中还残留的部分亮度信息,增加了亮度变化的不变性,保持目标彩色一致性[28],但是彩色不变量计算过程中并没有消除亮度偏移,所以该算法只对亮度变化具有部分不变性。RGSIFT对RGB分量进行归一化,归一化的R和G分量不受其光照强度的变化、阴影与底纹的影响,但是同样无法消除亮度变化中O1=O2=O3≠0时产生的亮度偏移。RGBSIFT对RGB每个通道计算SIFT特征描述符,所以包含了图像亮度和颜色变化不变性。

表1 彩色描述符算法不变量属性
每种彩色描述符对亮度变化和颜色变化的适应性见表1,图标中“+”表示描述符对该变化具有不变性,符号“-”表示不具有不变性,符号“+/-”表示具有部分不变性。可以看出RGBSIFT具有最佳的彩色不变性,其次是SIFT,HueSIFT,OpponentSIFT,而HSVSIFT没有彩色不变性,效果最差。
3数据及方法
3.1 数据准备及实施流程
较少的样本会导致试验结果的非一般性。为了保证对比分析结果的可靠性,收集了来自河南、山东、甘肃、四川等不同区域的五次无人机飞行任务共5000多幅Bayer真彩色航空影像,建立测试数据集。数据集中的影像成像条件差异性强,光照差别大,影像亮度不一;地表类型丰富,有湖泊、河流、林地、农田、草地、城镇;地形多样,包含山地、平原、高原。
3.2 适用性评价实验
1)模拟数据评价。建立图像的亮度变化和颜色变化模拟数据集,验证彩色描述符的适用性。实际成像中相同地物在不同图像之间既存在亮度的变化又存在颜色的变化,所以需要通过模拟数据生成亮度变化和颜色变化的数据。对图像数据进行0~65%亮度变换生成亮度变化系列数据。对图像数据进行0~50%颜色变换生成颜色变化系列数据。
2)不同类别影像评价。从测试数据集中分别选取以转弯、光照变化、不同源影像等3类不同成像条件的影像,以及林地、水域、道路、建筑、农田草地等5类不同地物内容的影像。对选择的8类影像分别进行特征匹配评价。其中转弯、明显光照变化、不同源影像反映出成像条件对彩色描述符的差异性,林地、水域、道路、建筑、农田反映成像内容上对彩色描述符的差异性。其中林地、水域、农田草地属于地物类型较单一影像,以亮度变化为主。道路、建筑属于地物类型较丰富和复杂影像,以颜色变化为主。
3)任务总体适用性评价。两幅影像之间的有效匹配点数是特征描述符可检出性的重要指标。选取四川汉旺山区-平原结合部的一次飞行任务航空光学影像集。该影像集地物内容丰富、飞行环境复杂,包含影像变化的大部分特征,影像重叠区域在60%以上。对任务中所有影像进行顺序配对,形成1266对测试数据。用彩色描述符分别对测试影像进行特征匹配,获取每种描述符对应的匹配点数,计算出每个描述符的平均召回率、平均错误率。
3.3 评价指标
常用的评价指标有受试者工作特征(Receiver Operating Characteristics,ROC)、召回率、错误率等[29]。研究认为ROC曲线适用于分类评价,召回率和错误率曲线更适合特征检测评价[30]。所以采用召回率(recall)、错误率(1-precision)指标。召回率代表匹配出正确的特征点数占所有匹配点数比例,代表了特征描述符的可检出性。错误率代表匹配错误点数占获取匹配总数的比例,反映了特征描述的唯一性。对于召回率和错误率曲线来说,曲线越向上代表匹配性能越高。

(5)
(6)
4结果与分析
4.1 实验1模拟数据评价
如图1所示,在亮度变化下RGBSIFT效果最好,其次是SIFT,HueSIFT和OpponentSIFT。由于RGBSIFT,SIFT,HueSIFT和OpponentSIFT都具有亮度变化不变性所以处于所有曲线上部,CSIFT和RGSIFT有部分亮度不变性所以处于曲线中间位置,而HSVSIFT不具有亮度不变性所以性能最差处于最下端。
如图2所示,在颜色变化下依旧是RGBSIFT效果最好,这是因为只有RGBSIFT能保持对颜色变化不变性,其次是基于灰度的SIFT算法。而HueSIFT,OpponentSIFT,CSIFT,RGSIFT,HSVSIFT都不具有颜色不变性,所以随着颜色变化梯度增加,匹配性能急剧下降。
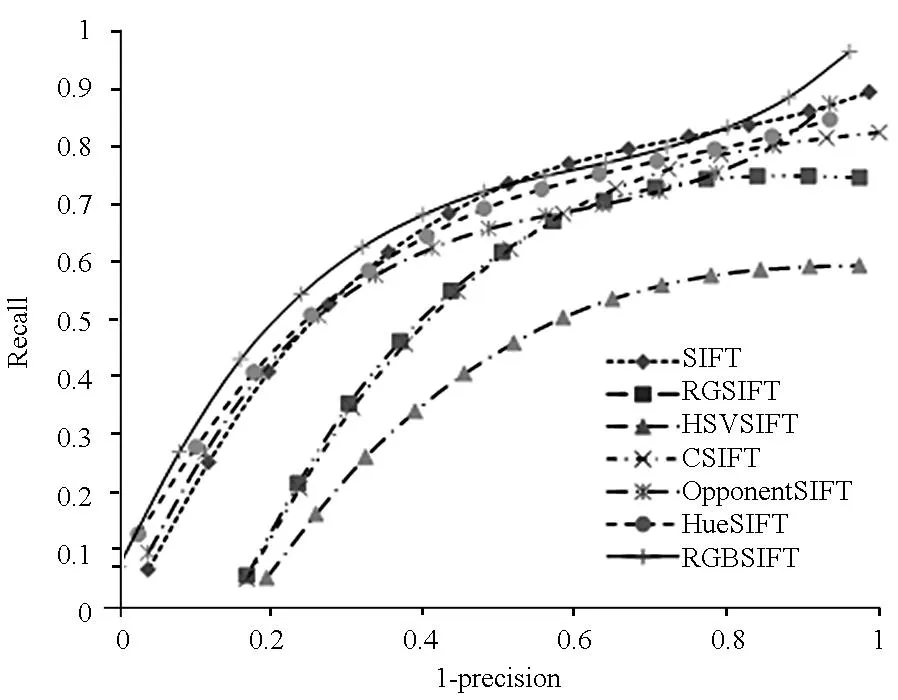
图1 亮度变化下彩色SIFT描述符对比曲线Fig.1 Comparative analysis of descriptorsfor brightness changes
4.2 实验2不同类别影像评价
表2显示的是不同类型下彩色SIFT描述符的适应性对比分析。总体来说RGBSIFT具有最优性能,对于成像条件比较复杂的影像(道路、建筑、光照变化、不同源)优势比较明显;SIFT对于主体比较单一的影像(水域和农田)效果较好;HueSIFT对于林地有稍微的优势;对于转弯处的影像OpponentSIFT表现出最好的性能。
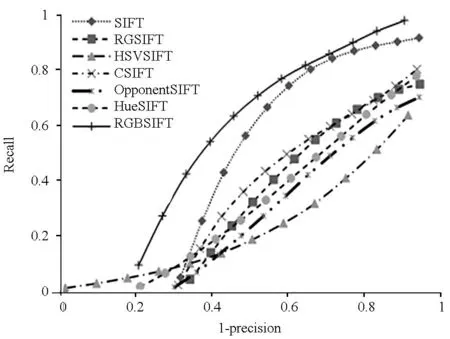
图2 颜色变化下彩色SIFT描述符对比曲线Fig.2 Comparative analysis of descriptors for color changes
建筑为主体的影像中地物颜色丰富、纹理复杂、建筑影像高低错落,导致了成像过程中存在光照各种变化,既有阴影、大气颗粒物等引起的亮度变化,又有地物之间复杂辐射相互反射、大气吸收反射散射等引起的颜色变化和偏移。光照变化影像在成像时存在遮挡、太阳光线变化、拍摄角度变化,而这些过程引起颜色和光照强度的变化。不同源影像是不同时间或不同传感器拍摄。因为拍摄时间和获取平台不同,相同地物在成像过程的太阳直接辐照度、环境的散射辐照度、大气的背景辐照度均有很大的不同,所以地物会发生较大的光照强度和颜色变化。因此RGBSIFT在处理这些影像匹配时会有更好的表现。林地为主体的影像有两个特征: 一是树的阴影引起的较强明暗变化,二是地物类型单一并以绿色为主。HueSIFT对亮度变化具有较好的不变性,对颜色变化比较敏感。林地以绿色为主引起颜色变化因素较少,在Bayer真彩色复原过程中,又减少了其他颜色干扰。所以HueSIFT比较适用于林地影像之间匹配。OpponentSIFT以对抗颜色空间为基础。对抗颜色空间模拟了人眼彩色视觉系统,用于物体识别[22]和立体分析具有较佳的效果。对于转弯处影像匹配来说,不同影像之间具有较大角度,地物有明显几何变形和不同显示截面,类似于立体视觉和对象识别过程,因此对于转弯处的影像匹配OpponentSIFT性能较佳。
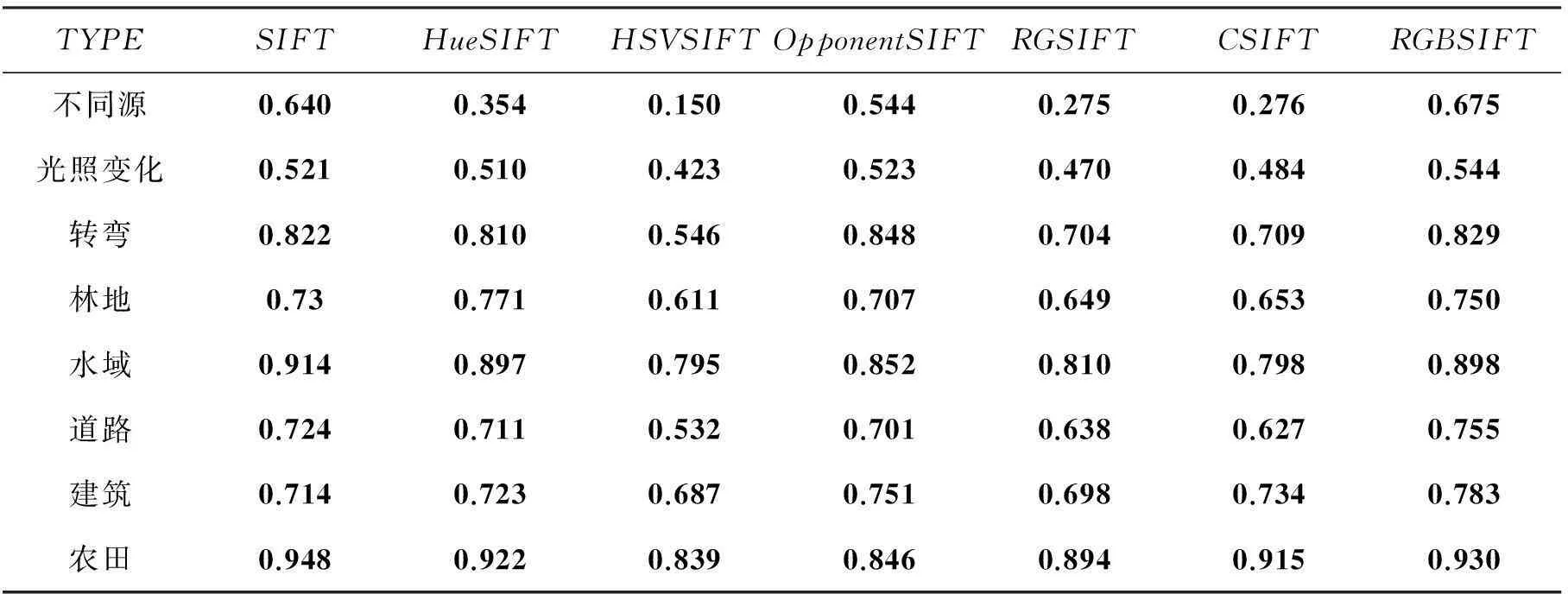
表2 不同类型下彩色SIFT描述符对比分析
4.3 实验3任务总体适用性评价
表3给出了每一种描述符对1266对测数据获取的平均匹配点数、平均召回率和平均错误率。总体趋势上RGBSFIT,SIFT和HueSIFT获取的特征匹配点数据最多。对于这次匹配任务总体上RGBSFIT比SIFT提升6%以上。根据统计,在1266中79%影像对RGBSIFT描述符匹配后的特征点数的点大于SIFT的特征点。匹配准确度越高说明误匹配点越少,该特征描述的唯一性越强,特征描述越稳定。从表3可以看出SIFT及其变种的彩色描述符,匹配准确度较高,适合作为该类影像的特征描述符。
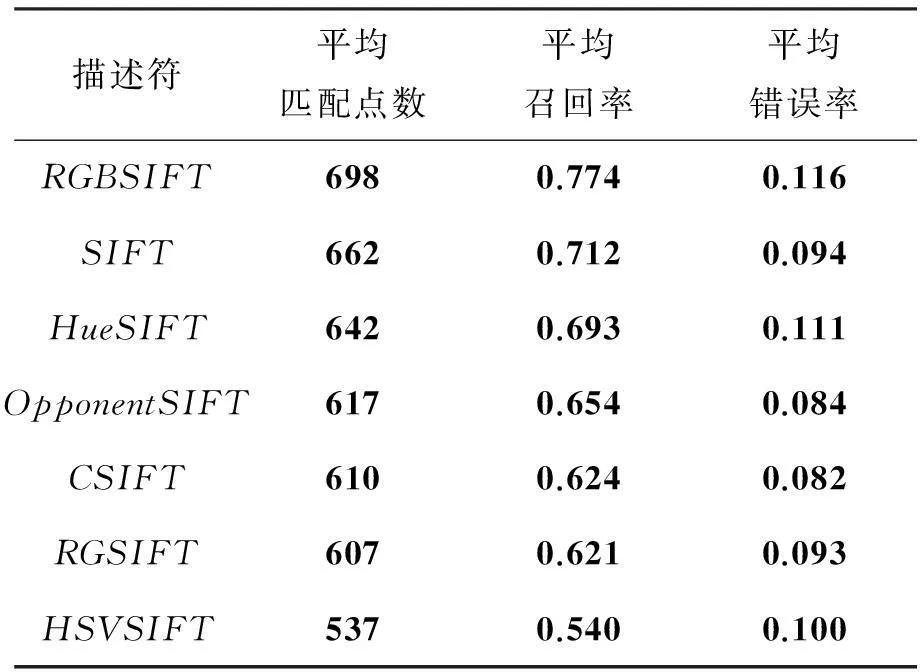
表3 描述符匹配指标均值
4.4 讨论
综上,通过理论分析及评估实验,在针对Bayer真彩色航空影像进行特征匹配处理时彩色描述符有以下特点:
1)总体来说彩色描述中RGBSIFT描述符由于对亮度及颜色的偏移和改变具有不变性,所以在实验结果中效果最好。其次是SIFT和HueSIFT描述符算法。而对于对象识别较为优秀的OpponentSIFT和CSIFT算法在彩色描述符特征匹配优势不明显。图像亮度变化时除了HSVSIFT算法,其他描述符都具体具有较好效果。颜色变化时彩色描述符中只有RGBSIFT优势明显。每种特征描述符匹配误差率都较低,并且差别不是很明显,说明SIFT及其变种的彩色描述符有较好的稳定性。
2)通过对不同类别的影像实验可以看出,航空遥感光学影像成像中亮度及颜色的变化和偏移比较普遍。城市建筑、成像时光照变化明显以及不同源影像中存在着式(1)中各种变化,所以这几类的影像特征匹配过程中RGBSIFT效果优势突出。对于影像内容比较单一的农田、草地、水域等成像环境比较稳定情况,SIFT算法效果好。HueSIFT对林地匹配有优势,而OpponentSIFT在转弯处的匹配效果较好。
3)SIFT算法是除了RGBSIFT算法以外效果较好的算法。在颜色梯度变化中曲线下降平缓优于RGBSIFT之外其他彩色描述符,对于影像内容比较单一影像,匹配效果最优。这是由于虽然SIFT等描述符都不具有颜色不变性,但是相机成像过程中白平衡一定程度上纠正了颜色偏移和改变。而且颜色不变性容易受到噪音干扰,所以在地物比较单一的影像中加入彩色不变性,反而会减低特征点的不变性。
5结论
本文结合Bayer真彩色航空影像的成像变化特征和光照变化对角线模型分析每种彩色描述符的不变性属性,并设计评价实验对SIFT及其彩色描述符的适用性进行详细分析对比。通过理论和实验分析可知彩色描述符中RGBSIFT对Bayer真彩色航空影像特征匹配有较好的普适性,并进一步证明了不同的彩色描述符针对不同类型Bayer真彩色影像有不同的适用性。根据评估,RGBSIFT彩色描述符比基于灰度的SIFT描述符在特征匹配的效果提升6%以上;对于不同类别的影像进行分析,对于复杂地物内容和成像条件复杂的影像RGBSIFT描述符具有明显优势,对于内容单一影像SIFT描述符效果更好,对于林地为主体的影像HueSIFT描述符效果较为突出,对于转弯影像OpponentSIFT描述符效果较好。
总体来说,没有数据先验知识情况下,推荐使用RGBSIFT描述符对Bayer真彩色航空影像进行特征匹配。根据影像类型对不变量彩色描述符进行合适的组合比单一使用一种描述符效果更好。
目前轻小型遥感数据获取平台获取光学影像的主要为Bayer真彩色影像,所以该结果具有较广泛适用范围。
参考文献(References)
[1]Lowe D G. Distinctive image features from scale-invariant keypoints[J]. International journal of computer vision, 2004, 60(2):91-110.
[2]Mikolajczyk K, Schmid C. A performance evaluation of local descriptors[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, 2003 (II): 257-263.
[3]Tuytelaars T, Mikolajczyk K. Local invariant feature detectors: a survey[J]. Foundations and Trends in Computer Graphics and Vision, 2008, 3(3):177-280.
[4]王永明, 王贵锦. 图像局部不变性特征与描述[M].北京:国防工业出版社, 2010.
WANG Yongming, WANG Guijin. Image local invarant features and descriptors[M]. Beijing: National Defense Industry Press, 2010. (in Chinese)
[5]朱遵尚, 朱肇昆, 陈圣义, 等. 自适应窗口仿射最小二乘匹配方法[J]. 国防科技大学学报, 2013, 35(4): 46-50.
ZHU Zunshang, ZHU Zhaokun, CHEN Shengyi, et al. An adaptive window affine least squares matching method[J]. Journal of National University of Defense Technology, 2013, 35(4): 46-50. (in Chinese)
[6]Abdel-Hakim A E, Farag A A. CSIFT: a SIFT descriptor with color invariant characteristics[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, New York, 2006 (2): 1978-1983.
[7]Geusebroek J M, Van den Boomgaard R, Smeulders A W M, et al. Color invariance[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2001, 23 (12): 1338-1350.
[8]Van De Weijer J, Gevers T, Bagdanov A D. Boosting color saliency in image feature detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2006, 28(1): 150-156.
[9]张锐娟, 张建奇, 杨翠, 等. 基于CSIFT的彩色图像配准技术研究[J]. 光学学报, 2008, 28(11): 2097-2103.
ZHANG Ruijuan, ZHANG Jianqi. YANG Cui, et al. Study on color image registration technique based on CSIFT[J]. Acta Optica Sinica, 2008, 28(11): 2097-2103. (in Chinese)
[10]Burghouts G J, Geusebroek J M. Performance evaluation of local colour invariants[J]. Computer Vision and Image Understanding, 2009, 113(1): 48-62.
[11]吴攀超, 王宗义, 林欣堂. 采用局部差分模型描述的彩色图像配准技术[J]. 西安交通大学学报, 2011, 45(10): 30-37.
WU Panchao, WANG Zongyi, LIN Xintang. Color Image Registration Algorathm Using Local Derivative Pattern Approach[J]. Journal of Xi′an Jiaotong University, 2011, 45(10): 30-37. (in Chinese)
[12]章宜林, 王敏. 结合小波和颜色信息的SIFT图像配准方法[J]. 华中科技大学学报:自然科学版, 2011, 39(S2): 127-130.
ZHANG Yilin, WANG Ming. SIFT image registration method based on wavelet and color information[J]. Journal of Huazhong University of Science and Technology: Nature Science, 2011, 39(S2): 127-130. (in Chinese)
[13]Brown M, Lowe D. Invariant features from interest point groups[C].13th British Machine Vision Conference, Cardiff, 2002.
[14]Fan P, Men A, Chen M, et al. Color-SURF: A surf descriptor with local kernel color histograms[C]//Proceedings of IEEE International Conference on Network Infrastructure and Digital Content, 2009: 726-730.
[15]Ai D, Han X H, Duan G, et al. Independent component analysis of color SIFT for image classification[C]//Proceedings of IEEE International Conference on Intelligent Computer Communication and Processing(ICCP), 2011: 173-178.
[16]Ai D, Han X, Ruan X, et al. Adaptive color independent components based SIFT descriptors for image classification[C]//Proceedings of International Conference on Pattern Recognition(ICPR), 2010: 2436-2439.
[17]Song X, Muselet D, Trémeau A. Affine transforms between image space and color space for invariant local descriptors[J]. Pattern Recognition, 2013, 46(8): 2376-2389.
[18]Zhu C, Bichot C E, Chen L. Image region description using orthogonal combination of local binary patterns enhanced with color information[J]. Pattern Recognition, 2013, 46(7): 1949-1963.
[19]Mikolajczyk K, Schmid C. A performance evaluation of local descriptors[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2005, 27(10): 1615-1630.
[20]Juan L, Gwun O. A comparison of sift, pca-sift and surf[J]. International Journal of Image Processing, 2009, 3(4):143-152.
[21]Zhu G, Wang Q, Yuan Y, et al. SIFT on manifold: an intrinsic description[J]. Neurocomputing, 2013, 113: 227-233.
[22]Van De Sande K E A, Gevers T, Snoek C G M. Evaluating color descriptors for object and scene recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2010, 32(9): 1582-1596.
[23]万志, 任建伟, 李宪圣, 等. 基于辐射传输模型的TDI CCD遥感相机信噪比分析[J]. 红外与激光工程, 2008, 37(3): 497-500.
WAN Zhi, REN Jianwei, LI Xiansheng, et al. Analysis of signal-to-noise ratio for remote sensing TDI CCD camera based on radiative transfer model[J]. Infrared and Laser Engineering, 2008, 37(3): 497-500. (in Chinese)
[24]Finlayson G D, Hordley S D, Xu R. Convex programming colour constancy with a diagonal-offset model[C]//Proceedings of IEEE International Conference on Image Processing, 2005,3: III-948-951.
[25]吴攀超, 王宗义, 刘涛. 复杂光照变化条件下的彩色SIFT匹配算法[J]. 华中科技大学学报:自然科学版, 2011, 39(5): 100-104.
WU Panchao, WANG Zongyi, LIU Tao. Color SIFT matching algorithm under changing complex illumination[J]. Journal of Huazhong University of Science and Technology: Nature Science, 2011, 39(5): 100-104. (in Chinese)
[26]Bosch A, Zisserman A, Muoz X. Scene classification via PLSA[C]//Computer Vision-ECCV, Springer Berlin Heidelberg, 2006: 517-530.
[27]Van De Weijer J, Schmid C. Coloring local feature extraction[C]//Proceedings of Computer Vision-ECCV, Springer Berlin Heidelberg, 2006: 334-348.
[28]Agarwal V, Abidi B R, Koschan A, et al. An overview of color constancy algorithms[J]. Journal of Pattern Recognition Research, 2006, 1(1): 42-54.
[29]Ke Y, Sukthankar R. PCA-SIFT: A more distinctive representation for local image descriptors[C]//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2004, 2: II- 506-513.
[30]Agarwal S, Roth D. Learning a sparse representation for object detection[C]//Proceedings of Computer Vision-ECCV, Springer Berlin Heidelberg, 2002: 113-127.
Performance analysis of color descriptors for aerial Bayer real-color image
QUXinyuan1,2,3,DUANFuzhou1,2,3,ZHAOWenji1,2,3,TIANJinyan1,2,3
(1.Key Laboratory of Resources Environment and GIS of Beijing Municipal,Beijing 100048, China;
2.State Key Laboratory Incubation Base of Urban Environmental Processes and Digital Simulationl,Beijing 100048, China;
3.College of Resource Environment & Tourism, Capital Normal University, Beijing 100048, China)
Abstract:It is unclear that what color descriptors best fits feature matching of aerial remote sensing Bayer real-color image. To analyze variation of imaging of the aerial image and algorithm characteristics of color descriptors, a theoretical analysis of invariant properties of color descriptors was presented. The effect and applicability of descriptors were verified and analyzed by three experimental methods which are evaluations of simulation data, different categories images and general applicability of task. The theoretical and experimental results show that RGBSIFT has best applicability for the feature matching of aerial Bayer real-color image. The usefulness of color descriptor is category-specific.
Key words:aerial Bayer real-color image; color invariance; color descriptors; feature matching; applicability
中图分类号:P237
文献标志码:A
文章编号:1001-2486(2015)02-058-07
收稿日期:2014-05-14基金项目:国家自然科学基金资助项目(41101403,41130744);国家科技支撑计划资助项目(2012BAH34B01);测绘地理信息公益性行业科研专项经费资助项目(201412020)
作者简介:屈新原(1982—),男,安徽六安人,博士研究生,E-mail:xinyuanqu@qq.com;段福洲(通信作者),男,副教授,博士,硕士生导师,E-mail:duanfuzhou@263.net
doi:10.11887/j.cn.201502013
http://journal.nudt.edu.cn